Изобретение относится к механизации садоводства и может быть использовано при усовершенствовании рабочих органов для улавливания плодов и ягод.
Известен улавливающий рабочий орган гусеничного типа, у которого перекрытие оснований кустов осуществляется улавливающей поверхностью, состоящей из цилиндрических щеток, установленных по внешнему контуру бесконечных гибких элементов.
Вследствие кругового поперечного расположения ворса на стержнях улавливающая поверхность задерживает ягоды, они застревают между стержнями ворса и не могут скатываться в накопители или транспортеры. При перемещении блоков на цепи вокруг звездочек большая часть застрявших ягод теряется, а некоторые ягоды, оставаясь в ворсе, раздавливаются ветвями, которые при перекрытии оснований кустов внедряются между блоками. Ворс, установленный поперек стержней, позволяет получать дополнительное перемещение улавливающей поверхности, а также отдельных ее частей относительно ветвей. Чем длиннее ворс и больше расстояние между стержнями, тем большее относительное перемещение могут получать контактирующие с улавливающей поверхностью ветви. Однако больщой диаметр цилиндрических блоков не допустим из-за ограниченной высоты улавливателя, так как ягоды на кустах обычно располагаются на высоте 100-150 мм.
Цель изобретения - уменьшение потерь ягод и улучшение условий разгрузки улавливателя. Это достигается тем, что блоки выполнены в виде желобов с наклонными стенками, а в нижней части желобов по всей длине последних установлены лотки.
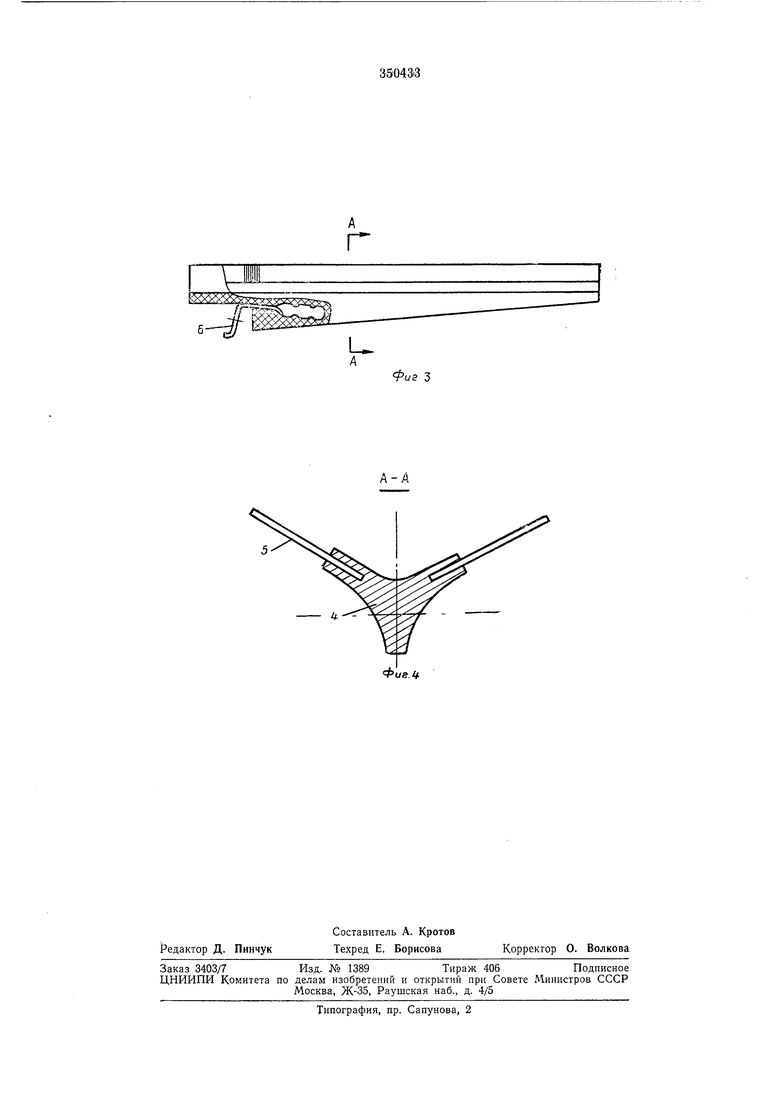
На фиг. 1 изображен предлагаемый улавливатель, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - блок, вид сбоку; на фиг. 4 -разрез по /1 -А на фиг. 3.
Улавливатель содержит две секции, каждая из которых состоит из желобов /, установленных по внешнему контуру бесконечного гибкого элемента 2. Бесконечные гибкие элементы вращаются на подвижных направляющих 3 (блоки или звездочки).
Желоб выполнен из лотков 4, на которых по всей длине закреплены под углом, например, с помощью клея слои эластичного ворса 5. К бесконечному гибкому элементу желоба крепятся кронштейном 6.
При перемещении улавливающего рабочего органа в направлении стрелки (см. фиг. 1) желоба 1, встречаясь с основаниями кустов в месте стыковки обеих секций, образуют неподвижную поверхность. Ягоды, попадая на поверхность желобов, скатываются вдоль направления ворса 5 поперек лотка 4 и затем
| название | год | авторы | номер документа |
|---|---|---|---|
| ЯГОДОУБОРОЧНАЯ МАШИНА | 1971 |
|
SU297343A1 |
| Улавливатель к ягодоуборочным машинам | 1982 |
|
SU1029876A1 |
| ЯГОДОУБОРОЧНАЯ МАШИНА | 1971 |
|
SU292661A1 |
| УСТРОЙСТВО для УЛАВЛИВАНИЯ ПЛОДОВ и ягод | 1971 |
|
SU290742A1 |
| МАШИНА ДЛЯ УБОРКИ ЯГОД~СО'"Г>&'^'^-5'^ а /^*„/^Х-' ^ V^ ч_. i f,-\i(Iffjn.rrvr•;'.';:•- ir-f Iii<j s.:,*Us:! ^' .j'sj-iii'ОСЕСОЮЗ[ОД1ЕНТНБИБЛИО7г:Кл | 1970 |
|
SU280089A1 |
| Ягодоуборочная машина | 1983 |
|
SU1172478A1 |
| УЛАВЛИВАТЕЛЬ К ВИНОГРАДОУБОРОЧНЫМ МАШИНАМВ П Т Бil-ШП чЧ^^-ПСр! ч-иад diiu:iLrl | 1972 |
|
SU429782A1 |
| Улавливатель ягодоуборочной машины | 1984 |
|
SU1162380A1 |
| МАШИНА ДЛЯ УБОРКИ ВИНОГРАДА | 1995 |
|
RU2111645C1 |
| Ягодоуборочная машина | 1979 |
|
SU791299A1 |