Изобретение относится к устройствам управления процессом копания экскаватора.
Известно устройство управления процессом копания экскаватора, включающее привод подъе.ма и преобразователь электрической нагрузки привода подъема в усилие, воздействующее на рукоять привода напора.
Целью изобретения является повыщение динамических свойств и уменьшение габаритов устройства.
С этой целью преобразователь электрической нагрузки привода подъема в усилие выполнен в виде управляемого посредством нелинейного элемента пневматического серводвигателя с жесткой отрицательной обратной связью по давлению воздуха в рабочем объеме силового цилиндра пневматического серводвигателя.
Сущность изобретеиия поясняется чертежом.
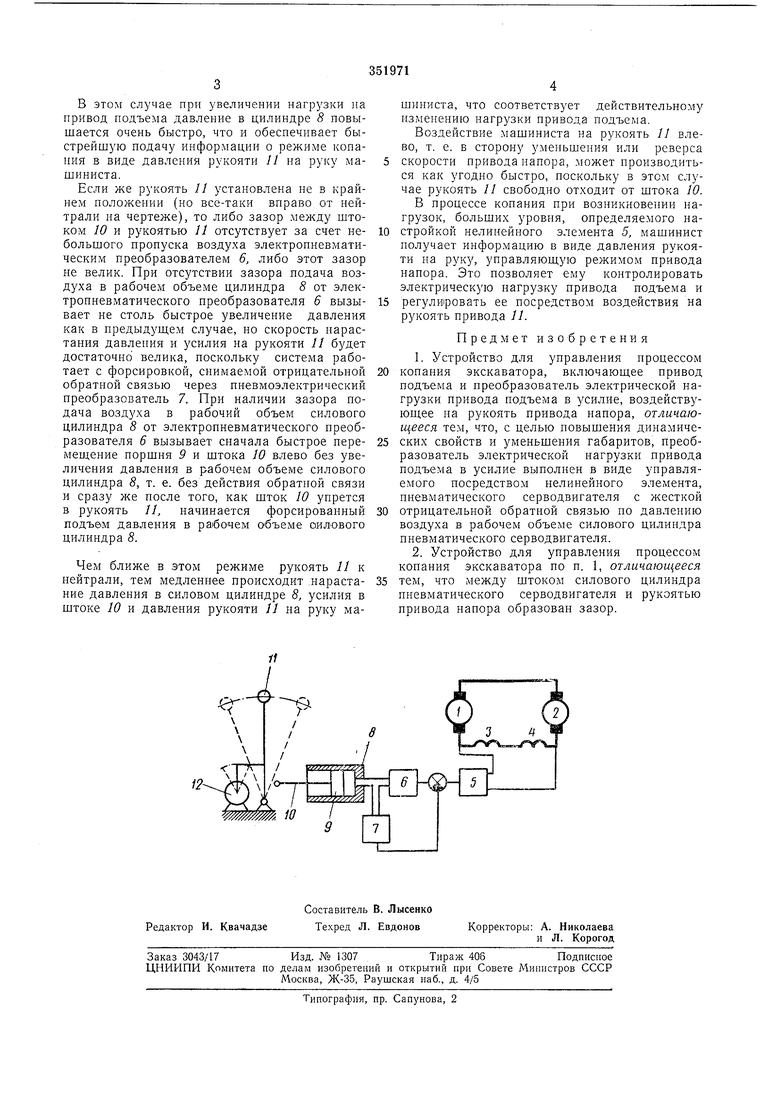
Устройство включает привод подъема экскаватора с генератором / и двигателем 2. Обмотки дополнительных полюсов 3 и 4 электрических машин иснользуются как шунг для из.мерения электрической иагрузки на иривод подъема и нелинейного элемента 5. Электропневматический иреобразователь 6 (например струйное реле) служит для преобразования электрического сигиала в пропорциональную величину давления воздуха.
служит для выраоотки сигнала жесткой отрицательной обратной связи по давлению в рабочем объеме силового цилиндра 8, в котором помещается поршень 9, связапный механически через шток 10 с рукоятью // унравления приводом напора. Это механическое соединение имеет зазор, который может выбираться при сближении рукояти // со штоком 10. Ось рукояти // привода напора связана механически с командоаппаратом 12.
При возникновении нагрузки выше заданной на приводе подъема электрический сигнал, снимаемый с обмотки доиолнительных полюсов 3 и 4 электрических машин, появляется на выходе нелииейного элемента 5 и постуиает на вход электропневматического иреобразоватоля 6.
Электропневматнческий преобразователь 6 осуществляет подачу сжатого воздуха в рабочий объем силового цилиндра 8. Действие устройства при этом зависит от полол ения рукояти // и поршня 9 со штоком 10. Если машинист устанавливает рукоять // управления приводом нанора сразу в крайнее нереднее
положение (на чертеже внраво), то зазор между штоком 10 и рукоятью 11 отсутствует, а поршень 9 находится также в крайнем правом положеннн, что определяет ничтожную величину рабочего объема снлового цилнид
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Одноковшовый экскаватор | 1991 |
|
SU1799414A3 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU244212A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ КОВША КАНАТНОГО КАРЬЕРНОГО ЭКСКАВАТОРА И РАБОЧЕЕ ОБОРУДОВАНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485317C2 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 1990 |
|
RU2029828C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| Устройство для управления ковшомэКСКАВАТОРА | 1978 |
|
SU804789A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1970 |
|
SU279462A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
