Изобретение относится к горным машинам, предназначенным для разработки полезных ископаемых и пород вскрыши с погрузкой в транспортные средства, а также для формирования отвалов.
При проведении разработки месторождений полезных ископаемых открытым способом карьерными экскаваторами существуют критические режимы работы машин и механизмов, которым необходимо внешнее принудительное ограничение нагрузок. Например, в начале черпания, когда ковш экскаватора максимально забрасывается к гусеницам ходовой тележки, стрела приподнимается, происходит, так называемый «заброс» стрелы. После «заброса» стрелы следует ее падение вперед, что вызывает негативные динамические нагрузки в конструктивных узлах машины. Для исключения эксплуатации машин в критических режимах используют различные методы контроля и автоматического запрета.
Известен экскаватор (US 648073 B1, 2002.11.12), включающий устройство управления двигателем подъема, датчики контроля скорости и крутящего момента двигателя подъема, а также механизм управления двигателем напора, а именно датчик крутящего момента и датчик скорости перемещения рукояти к стреле в случае, когда скорость двигателя подъема меньше нижнего значения скорости при большом крутящем моменте, и для разрешения движения ковша от стрелы, когда скорость двигателя превышает нижнее значение скорости или отсутствует большой крутящий момент.
Экскаватор содержит датчик линейного перемещения, установленный на платформе, и стержень, который одним концом закреплен на стреле, а другим концом прикреплен к датчику линейного перемещения, движение стержня приводит к изменению его позиции, механизм для определения позиции датчика линейного перемещения и PLC - программируемого контроллера, связанный с механизмом определения позиции датчика линейного перемещения и механизмом управления двигателем напора для перемещения рукояти ковша к стреле как ответ на показание механизма о том, что позиция датчика линейного перемещения изменилась по отношению к установленной точке.
Известны способ и устройство для мониторинга режима нагрузки драглайна или электрического одноковшового экскаватора (RU 2311511 C2, 27.11.2007), а более конкретно к способу и устройству для мониторинга режимов нагрузки стрелы. Изобретение позволяет осуществлять непрерывный контроль ориентации в соответствии с плоскостью оси стрелы или вдоль оси ориентации драглайна или одноковшового экскаватора. Для этого драглайн (одноковшовый экскаватор) содержит стрелу, ковш, подъемный и тяговый канаты. С помощью технических средств формируются данные ориентации относительно плоскости, содержащей ось стрелы и, по меньшей мере, одного из следующих элементов группы, состоящей из подъемного каната, стрелы, ковша. Эти данные используют для управления режимом нагрузки на основе состояния драглайна или электрического одноковшового экскаватора. Информацию об ориентации и/или разориентации подают в систему управления для автоматизации отклика на выявляемый таким образом режим перегрузки и для управления максимальным напряжением в конструкции. Следовательно, можно модифицировать управляющие воздействия так, чтобы во время приложения управляемой перегрузки не возникло избыточного (опасного) напряжения. Способ предусматривает физическое сцепление подъемного каната с датчиком и данные ориентации получают путем обнаружения поперечного отклонения стрелы от оси. Предложены варианты осуществления способа в зависимости от вида применяемых датчиков (в том числе и бесконтактных). Но способ не представляется надежным, т.к. используется несколько переменных и измерения осуществляются в динамике, поэтому весьма сомнительно оперативное устранение перегрузок стрелы.
В качестве прототипа выбраны управление и конструкция карьерного гусеничного экскаватора, типа ЭКГ-10 (Экскаваторы карьерные гусеничные типа ЭКГ-10. Руководство по эксплуатации 3536.00.00.000РЭ, ОАО «Ижорские заводы», Санкт-Петербург, 2000 г., стр.11, 15, 19, 45).
Экскаватор состоит из ходовой тележки с роликовым кругом, рабочего оборудования и механизмов с системой управления, установленных на поворотной платформе. Механизмы на поворотной платформе закрыты кузовом. В передней части платформы установлена кабина машиниста. Также на поворотной платформе размещена двуногая стойка, состоящая из задней и передней двухбалочных конструкций. Двуногая стойка соединена вантами со стрелой, служит для ее крепления и передачи усилий, возникающих при копании грунта на поворотную платформу экскаватора. Двухбалочная стрела состоит из двух шарнирно-сочлененных секций, нижняя секция стрелы пятой закреплена в кронштейнах передней части платформы. Однобалочная рукоять установлена внутри стрелы. Седловой подшипник с вкладышами представляет собой стальную отливку, в которой на осях установлены ролики, являющиеся опорой рукояти в вертикальной плоскости. Установлен седловой подшипник на напорной оси на подшипниках скольжения, вращается в вертикальной плоскости на цапфах стрелы. Управление работой экскаватора осуществляют следующим образом: в начале копания ковш устанавливают на уровне стояния экскаватора и разрабатывают забой снизу вверх приводами напора и подъема таким образом, чтобы обеспечить заполнение ковша, который затем перемещают на выгрузку. Установка ковша в начале копания, осуществление операций напора подъема и поворота, зависит от навыков и приемов работы машиниста, т.е. исключение перегрузок механизмов субъективно зависит от квалификации машиниста.
Технической задачей изобретения является обеспечение автоматического оперативного контроля положения ковша с рукоятью, посредством мониторинга положения седлового подшипника, для создания оптимального напорного усилия в начале копания и наиболее рационального распределения нагрузок на поворотной платформе экскаватора.
Задача решается управлением экскавацией грунта путем установки ковша в забой, его перемещением приводами напора и подъема до наполнения, поворотом от забоя и выгрузкой, причем на начальной стадии копания осуществляют непрерывный мониторинг угла поворота седлового подшипника с рукоятью и вертикалью, при значениях угла ≤6° усилие напора снижают до величины, определяемой формулой:
где Sн - усилие напора;
Sп - усилие подъема, реализуемое в начале копания;
Rclc - реакция в стреле от рукояти и плечо ее действия;
Gi - вес узлов на стреле (металлоконструкция, привод напора, площадки, головные блоки, электродвигатель);
li - плечо действия соответствующего веса относительно оси крепления стрелы к поворотной платформе;
k - задаваемый при проектировании коэффициент запаса устойчивости стрелы в момент копания;
l1n - плечо действия усилия подъема (Sп), реализуемое в начале копания относительно оси крепления стрелы в канате, идущем от головных блоков к ковшу;
l2n - плечо действия усилия подъема (Sп), реализуемое в начале копания относительно оси крепления стрелы в канате, идущем от головных блоков к барабану подъемной лебедки;
ln - плечо действия усилия напора (Sн).
Экскаватор для осуществления способа содержит ходовую тележку с роликовым кругом, на котором установлена поворотная платформа с размещенными на ней кузовом, кабиной, приводами, механизмами поворота и подъема, системой управления электроприводами, двуногой стойкой, выполненной в виде передней и задней двухблочных конструкций, рабочим оборудованием, включающим стрелу, седловой подшипник, ковш с рукоятью, установленной в седловом подшипнике. Редуктор напора с кремальерной шестерней и электродвигатель размещены на стреле, соединенной вантами с двуногой стойкой. На стреле, в зоне крепления седлового подшипника, установлен датчик угла поворота седлового подшипника, связанный с системой управления электроприводов, механизм подъема размещен с максимальным приближением к заднему торцу поворотной платформы. Приводы и механизмы поворота размещены между задними балками двуногой стойки над роликовым кругом.
Автоматический оперативный контроль положения ковша осуществляется с помощью датчика, фиксирующего поворот седлового подшипника с рукоятью относительно стрелы и связанного с системой управления. Если этот угол наклона рукояти относительно вертикали ≤6°, то стрела может опрокинуться в сторону двуногой стойки вокруг точки крепления к поворотной платформе, поскольку в таком положении ковша с рукоятью ветвь подъемного каната, идущая непосредственно к ковшу, приближается к стреле и коэффициент запаса устойчивости стрелы уменьшается. При подъеме ковша, начиная от угла наклона рукояти к вертикали 6°, ветвь подъемного каната удаляется от стрелы и запас устойчивости стрелы увеличивается. Величина усилия напора (Sн) в зоне угла наклона рукояти относительно вертикали ≤6° для каждого конкретного экскаватора находится расчетно-эмпирически, зависит от массогабаритных характеристик рабочего оборудования и задается в системе управления при ее настройке. Таким образом, решается задача обеспечения оптимального напорного усилия в процессе копания.
Гарантированное исключение критического режима на начальной стадии копания позволяет максимально рационально распределить нагрузки на поворотной платформе экскаватора. А именно, лебедка подъема и приводы поворота перенесены на заднюю половину центральной части поворотной платформы. Причем установка лебедки подъема с максимальным приближением к заднему торцу поворотной платформы и размещение приводов поворота между задними балками двуногой стойки позволяет существенно снизить вес противовеса, необходимого для уравновешивания поворотной платформы и обеспечения устойчивости экскаватора. Кроме того, размещение приводов поворота между задними балками двуногой стойки над задней частью роликового круга, при наклоне поворотной платформы вперед, в процессе копания, исключает дополнительные радиальные нагрузки на приводную шестерню, поскольку в этом случае увеличивается радиальный зазор в зубчатом зацеплении механизма поворота. Такое размещение оборудования на поворотной платформе является новым, позволяет максимально рационально распределить нагрузки на ней и решает поставленную задачу.
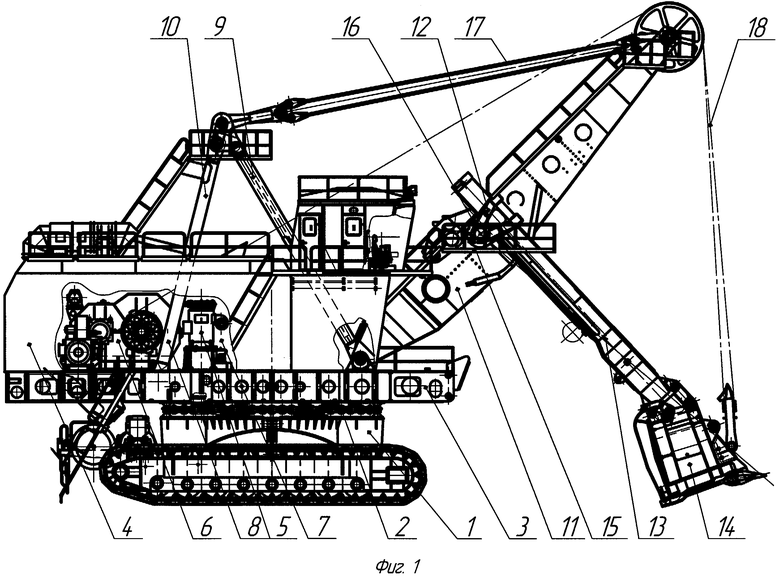
На фиг.1 представлен общий вид экскаватора, реализующий управление экскавацией.
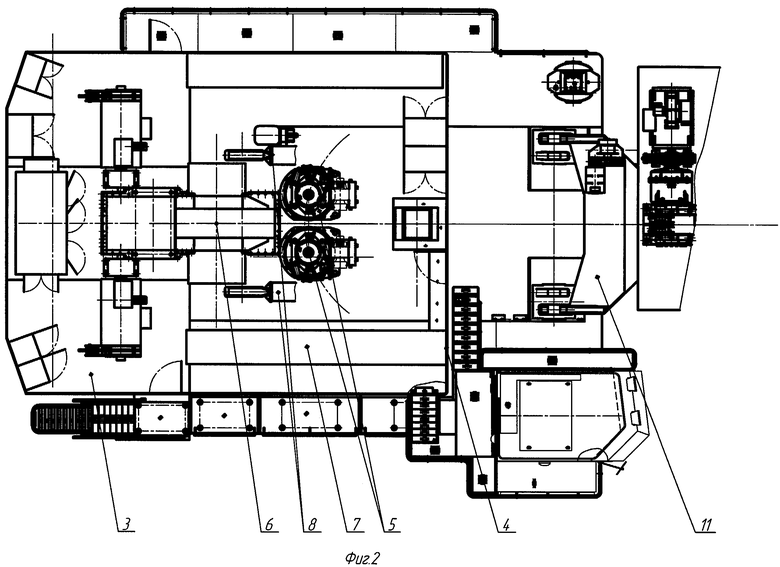
На фиг.2 представлена поворотная платформа экскаватора, вид сверху.
На фиг.1 и 2 представлен экскаватор, содержащий ходовую тележку 1, на верхнем поясе которой смонтирован роликовый круг 2, на нем установлена поворотная платформа 3. На поворотной платформе 3 размещен кузов 4 с приводами и механизмами поворота 5 подъема 6, а также системой управления электроприводами 7. Кроме того, на поворотной платформе 3 установлены: двуногая стойка 8, состоящая из двух стоек - передней 9 и задней 10, каждая из которых выполнена в виде двух балок, стрела 11, на которой в седловом подшипнике 12 установлена рукоять 13 с ковшом 14. На стреле 11 в зоне крепления седлового подшипника установлен датчик 15, фиксирующий угол поворота седлового подшипника 12 относительно вертикали и связанный с системой управления электроприводами 7. Возвратно-поступательное перемещение рукояти 13 с ковшом 14 относительно седлового подшипника 12 осуществляется механизмом напора 16, размещенным на стреле 11. Стрела 11 фиксируется вантами 17 относительно двуногой стойки 8. Подъемные канаты 18.
Способ управления экскавацией осуществляется следующим образом. В начале копания ковш 14 устанавливают в забой, затем приводами и механизмами подъема 6 и напора 16 перемещается по массиву забоя до наполнения ковша 14 с последующим поворотом экскаватора на выгрузку и обратно в забой. В начале копания, в момент заброса ковша 14 к гусеницам ходовой тележки 1, реакция от усилия привода напора 16 в сочетании с равнодействующей от усилий в ветвях подъемных канатов 18, создает состояние неустойчивого равновесия. Неустойчивое равновесие может опрокинуть стрелу 11 в направлении двуногой стойки 8 и реализуется при условии, что угол, образуемый рукоятью 13 и вертикалью ≤6°, который эквивалентен углу поворота седлового подшипника 12. Фактическое положение седлового подшипника 12, а следовательно, рукояти 13 определяет датчик угла поворота седлового подшипника 15 и при условии, что угол седлового подшипника и вертикалью ≤6°, подает сигнал в систему управления электроприводами 7, которая ограничивает действующее на рукоять усилие напора до величины, равной  установленной расчетно- эмпирически в заданной системе управления электроприводами 7, как ограничительная (стопорная) для усилия напора.
установленной расчетно- эмпирически в заданной системе управления электроприводами 7, как ограничительная (стопорная) для усилия напора.
Применение изобретения позволяет создать оптимальное напорное усилие в начале копания, при этом исключить нештатные ситуации, когда под действием усилия напора возможен заброс стрелы и качественно изменить компоновку оборудования на поворотной платформе за счет возможности нового распределения нагрузок на ней.
Возможность перенести тяжеловесные узлы на заднюю часть поворотной платформы существенно снижает вес противовеса, который используют для уравновешивания поворотной платформы и обеспечения устойчивости всего экскаватора в целом. Уменьшение веса противовеса в свою очередь снижает нагрузки на роликовый круг и массу экскаватора, что определяет снижение удельного давления на грунт и как следствие возможность использовать экскаватор на более слабых грунтах, что расширяет его технологические возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU244212A1 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ КОВША КАНАТНОГО КАРЬЕРНОГО ЭКСКАВАТОРА И РАБОЧЕЕ ОБОРУДОВАНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485317C2 |
| УНИФИЦИРОВАННЫЙ ЭКСКАВАТОР | 2008 |
|
RU2379426C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
| Одноковшовый экскаватор | 1991 |
|
SU1799414A3 |
| Одноковшовый экскаватор | 1988 |
|
SU1645387A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ТИПА ПРЯМОЙ ЛОПАТЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU239130A1 |
Группа изобретений относится к горным машинам, предназначенным для разработки полезных ископаемых и пород вскрыши с погрузкой в транспортные средства, а также для формирования отвалов и погрузочных работ. Технический результат - обеспечение автоматического оперативного контроля положения ковша с рукоятью посредством мониторинга положения седлового подшипника. Способ управления экскавацией грунта путем установки ковша в забой, его перемещением приводами напора и подъема до наполнения, поворотом от забоя и выгрузкой, причем на начальной стадии копания осуществляют непрерывный мониторинг угла поворота седлового подшипника с рукоятью и вертикалью, при значениях угла ≤6° усилие напора снижают до ограничительной (стопорной) величины. Экскаватор содержит ходовую тележку с роликовым кругом, на котором установлена поворотная платформа с размещенными на ней кузовом, кабиной, приводами, механизмами поворота и подъема, системой управления, двуногой стойкой, выполненной в виде передней и задней двубалочных конструкций, рабочим оборудованием, включающим стрелу, седловой подшипник, ковш с рукоятью, установленной в седловом подшипнике. Редуктор напора с кремальерной шестерней и электродвигатель размещены на стреле, соединенной вантами с двуногой стойкой. На стреле, в зоне крепления седлового подшипника, установлен датчик угла поворота седлового подшипника, связанный с системой управления электроприводами. При этом механизм подъема размещен с максимальным приближением к заднему торцу поворотной платформы. Приводы и механизмы поворота размещены между задними балками двуногой стойки над роликовым кругом. 2 н.п. ф-лы, 2 ил.
1. Способ управления экскавацией грунта путем установки ковша в забой, его перемещением приводами напора и подъема до наполнения, поворотом от забоя и выгрузкой, отличающийся тем, что на начальной стадии копания осуществляют непрерывный мониторинг угла поворота седлового подшипника с рукоятью и вертикалью, при значениях угла ≤6° усилие напора снижают до величины, определяемой формулой:

где Sн - усилие напора;
Sn - усилие подъема, реализуемое в начале копания;
Rclc - реакция в стреле от рукояти и плечо ее действия;
Gi - веса узлов на стреле (металлоконструкция, привод напора, площадки, головные блоки, электродвигатель);
li - плечо действия соответствующего веса относительно оси крепления стрелы к поворотной платформе;
k - задаваемый при проектировании коэффициент запаса устойчивости стрелы в момент копания;
lln - плечо действия усилия подъема (Sn), реализуемое в начале копания относительно оси крепления стрелы в канате, идущему от головных блоков к ковшу;
l2n - плечо действия усилия подъема (Sn), реализуемое в начале копания относительно оси крепления стрелы в канате, идущему от головных блоков к барабану подъемной лебедки;
ln - плечо действия усилия напора (Sн).
2. Экскаватор для осуществления способа по п.1, содержащий ходовую тележку с роликовым кругом, на котором установлена поворотная платформа с размещенными на ней кузовом, кабиной, приводами, механизмами поворота и подъема, системой управления электроприводами, двуногой стойкой, выполненной в виде передней и задней двубалочных конструкций, рабочим оборудованием, включающим стрелу, ковш с рукоятью, установленной в седловом подшипнике;
седловой подшипник, редуктор напора с кремальерной шестерней и электродвигатель размещены на стреле, соединенной вантами с двуногой стойкой, отличающийся тем, что на стреле в зоне крепления седлового подшипника установлен датчик угла поворота седлового подшипника, связанный с системой управления электроприводами, механизм подъема размещен максимально приближенно к заднему торцу поворотной платформы, а приводы и механизмы поворота размещены между задними балками двуногой стойки над роликовым кругом.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| СПОСОБ И ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТЕЧЕНИЯ ГАЗА ИЛИ ЖИДКОСТИ В ТРУБАХ | 1926 |
|
SU3536A1 |
| - СПб., 2000, с.11 | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Способ управления копающими механизмами экскаватора в транспортном режиме | 1985 |
|
SU1240839A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Воздухораспределитель | 1946 |
|
SU68017A1 |
| ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА ЯДЕРНОГО РЕАКТОРА | 1998 |
|
RU2133511C1 |

