| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 2022 |
|
RU2779252C1 |
| Стенд для испытаний одноковшовых экскаваторов | 1987 |
|
SU1469032A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134678A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 1966 |
|
SU186338A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ КОВША КАНАТНОГО КАРЬЕРНОГО ЭКСКАВАТОРА И РАБОЧЕЕ ОБОРУДОВАНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485317C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2010 |
|
RU2450106C1 |
Изобретение относится к механизации производства земляных работ и применимо на одноковшовых экскаваторах с гидравлическим приводом рабочего оборудования Цель - повышение произв-сти путем автоматизированного- выполнения зачнстных и планировочных работ. Устр-во содержит стрелы (С) 1j рукоять (Р) 2 с ковшом 3, гидроцилиндры 4, 5ибС 1, 2Р2и открывания днища ковша 3 соответственно и гидродвигатель 1 поворота экскаватора. В шарнирах крепления С 1 к поворотной платформе, Р 2 к С 1 и на центральной цапфе установлены соответственно угловые потенциометричес- кие датчики В, 9 и 10. Сигналы-с их
W1
выходов поступают последовательно ; через, коммутатор 11 аналоговых сиг- налов в АЦП 12. С его выхода сигнал
поступает в блок микропрограммного управления (БМУ) 13, а оттуда на пульт 14 управления. С выходов БМУ 13 yпpaвляющIie сигналы через двухка- нальные усилители 15-18 поступают
на обмотки электромагнитов 19-22 , золотниковых гидрораспределителей . 23-26. Масло в них подается насосом
27 из масляного бака 28. По значениям текущих углов поворота Р 2, нак1
Изобретение относится к механизации производства земляных работ и прменимо на одноковшовь т экскаваторах с гидравлическим приводом рабочего оборудования - прямой и обратной ло- паты.
Целью изобретения является повыше I ние производительности путем автома- I тизированного вьшолнения зачистных I и планировочных работ.
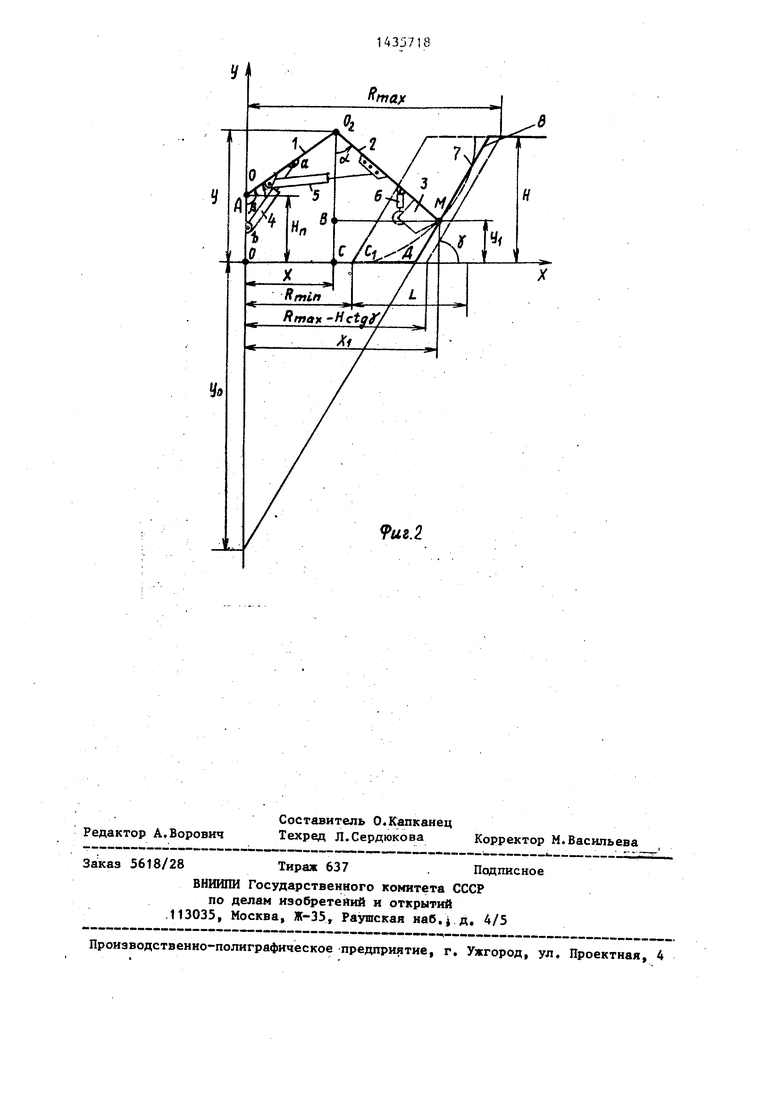
I На фиг. 1 показана структурная схема управления рабочим .оборудованием экскаватора; на г. 2 - схема определения зависимости угла наклона I стрелы и вьщвижения штоков ее гид- роцилиндров от угла поворота рукоят- i ки с оборудованием прямой лопаты. I Устройство состоит из стрелы .1, j рукоятки 2 с ковшом 3, гидроцилинд- ; ров стрелы 4, рукояти 5 и открьшания днища ковша 6, гидродвигателя 7 по- : ворота экскватора, угловых.потенцио- метрических датчиков , установленных соответственно в шарнирах крепления стрелы к поворотной плат- форме, рукояти к стреле и на централной цапфе, коммутатора аналоговых сигналов 11, аналого-цифрового преобразователя (АЦП) 12, блока микропрограммного управления (БМУ) 13, пульта 14 управления, двухканальных усилителей 15-18, обмоток электромагнитов 19-22, золотниковых гидрораспределителей 23-26, масло в которых подается насосом 27 из масляного бака 28.
На фиг. 2 обозначены:
0 - ось вращения стрелы;
лона С 1 и откоса забоя в БМУ 13 вычисляются координаты зубьев ковша X, и Y. Выдержка координат Х и Y обеспечивает перемещение зубьев ковша по заданной траектории с последовательным приращением к X, величины ih за каждый цикл копания, где i - порядковый номер цикла; h - толщина срезаемой стружки грунта. Копание с установленной позиции экскаватора заканчивается при Х, равном наибольшему радиусу копания, а Y, - высоте забоя. 2 ил.
0 - ось вращения рукояти; , If - длина стрелы; 0,М 1р - длина рукояти с ковшом;, Н„ - высота пяты стрелы; Н - высота забоя; oi - угол поворота рукояти; ( - угол наклона стрелы; jf - угол откоса забоя; - - минимальный радиус копания
ГП1Ц
на уровне стоянки;
наибольший радиус копания; L - длина планируемого участка
на уровне стоянки; X и Y - координаты оси X, и Х - координаты режущей кромки ковша экскаватора (точки М).
Стрела 1 шарнирно закреплена в точке О, на поворотной платформе экскаватора. К голове стрелы в точке 0 шарнирно крепится рукоять 2 с ковшом 3. Поворот стрелы относительно О, осуществляется гидроцилиндрами 4, а рукоять относительно 0 поворачивается гйдроцилиндром 5. Поворот ковша осуществляется гидроцилиндром 6. В шарнирах О, и 0 установлены угловые датчики сопротивления. Дугой 7 и прямыми 8 показаны действительная и заданная (С, ДЕ) траектории движения зубьев ковша.
Координаты точки 0 (голова стрелы) определяются равенстваг X Ipcosf ;
Y , lcsinp+ Hn (1) Координаты точки М (зубьев ковша) определяются равенствами Х X + 1р sinoi; Y, Y - Ipcosoc. (2)
31435718
Совместное решение этих систем где А,, уравнений для случая Y О (зубья ковша движутся по прямой ) дает
Р
arcsin
(.Hn) (3) «
Уравнение прямой, наклонной к оси X (ДЕ), имеет вид
Y, X,cgy- YO. (4)
Совместное решение систем уравнений (1) и (2) для случая (4) - зубья ковша движутся ко наклонной прямой ДЕ - дает
Н,, + l isinjb - tgy cos) - - IpCcosei + tgy sinci.) 4- Y, 0.(5)
Начальное значение угла ai О (начало копания), определяет начальное значение, угла .
Далее, задавая углу «6 малые приращения (1-2 ), из выражений (3) и (5) находим текущие значения угла : наклона стрелы (Ь ,
Подставляя текущие значения углов «; и А в равенство (2), определим координаты X и Y :
l|,cos
- IpCosot,
(6)
, /3 + Ipsinoi-; Y, Н + - Выдержка координат и Y, обеспечивает перемещение зубьев ковша по заданной траектории с последова- тельным приращением к Х величины ih за каждый цикл копания:
Х X + 1р sin ot + ih ., где i - порядковый номер цикла (1,
2, 3 .0. п); h - толщина срезаемой стружки
грунта.,
Копание с установленной позиции экскаватора заканчивается при X, мач Y, Н.
Далее экскаватор перемещается на следующую позицию (вперед или в стоону) и процесс повторяется.
Перемещение штоков гидроцилиндров стрелы и производительность насоса одачи масла к иим пропорциональны углу f и может быть определено по теореме косинусов из треугольника 0,аЬ (фиг. 2), где стороны 0,Ь и О,а - постоянные величны, а сторона аЬ - IJJT длина гидроцилиндров стре- лы со штоками.
ыт U1T1 uiTVf
- -,jb + с - 2bccosA ,
4b 2bccosA; - (7)
и А; начальное и промежуточное значения угла в шарнире 0 (между вертикалью и стрелой);
А, (5;+ 90%А,- Э;+ 90°;
cos( + 90°) sin (5ц;
cos((5; + 90) -sinful.
Подставив этизначения в (7), имеем:
)
30
,
гЛ,
15
-лГь
1ы, - l T -b2+c +2fccsin,,-(8)
20
+с2+2Ьсз1пр„ .
Прои зводительность насоса подачи масла в гироцилиндры стрелы
(9) где Sj, - площадь поршня гидроцилиндров стрелы.
Устройство работает следующим образом.
При необходимости перейти от разработки котлована к зачистным рабо- 25 там машинист экскаватора устанавли- вает рабочее оборудование в исходное положение, при котором значение угла ei О подает питание на датчики Е и элементы системы. При этом БМУ начинает выполнять программу, записанную в его памяти. Аналоговый коммутатор подключает выходное напряжение потенциометрического датчика 8, отражакщего угол наклона стрелы jb , к входу АЦП. Последний преобразует 35 сигнал датчика в цифровой код, запи- сьюающийся в памяти БМУ 13.
В дальнейшем на один из электромагнитов 20 гидрораспределителя 24
40 через усилитель 16 мощности подается единичный сигнал. Он срабатывает и масло от насоса 27 системы поступает в гидроцилиндр 5 рукояти 2, осуществляя ее поворот против часовой
45 стрелки. Значение угла об начинает увеличиваться (Ы;., Ы;+Лсб). Его текущее значение ot измеряется датчиком 9 и БМУ 13. По измеренному значению угла oin и по выражению (3)
50 вычисляется значение угла наклона стрелы А ) которое реализуется подачей сигнала на один из каналов усилителя 17, на выход которого включены электромагниты 21, гидрораспредеgg лителя 25. Один из электромагнитов 21 срабатывает и масло от насоса 27 подаетс й к гидроцилиндрам стрелы 4, а БМУ 13 измеряет значение угла ее . наклона. . . Как только измеряемое
51435718
/3„ станет равным вычиспен- контроллер выключает гид- рораспределктель 25. Подставляя текущее значение углов oi; и р- в выражезначениекому р
нке (6), контроллер вычисляет координаты зубьев ковша Х при Y, О,, что необходимо для отслеживания момента перехода от горизонтальной прямой к откосу забоя. Если при этом ю значение Х не превысит величину го- ризонтапьного участка заданного профиля RjCR, то БМУ начина- е г определять значение угла нэ выражения (5) по измеренному значению 15 угла поворота рукояти Ы„ .
При наличии разницы между измеренным и вычисленным значениями угла на соответствующие электромагниты 21 гидрораспределителя 25 подается сиг- 20 нал и они включают подачу масла в ту или другую полости гидроцилиндров стрелы 4.. До тех пор имеется равенство „ fiuПри этом обработка закончена, н пульт машиниста ззьщае тся сигнал О работка закончена и экскаватор уп равлением вручнукз перемещается на новую позицию вперед или в сторону
Перемещения штоков гидроцилиндр стрелы по текущему значению угла /3 и соответствующие объемы масла, по даваемые в полости этих цилиндров в функции от угла /5 , определяются по зависимости (8) и (9).
Формула изобретени
Рабочее оборудование экскаватор включающее стрелу с шарнирной опор рукоять, соединенную шарниром со стрелой, причем в шарнирной опоре .стрелы и в шарнире крепления рукоя к стреле установлены датчики угла поворота, три гидроэлектрозолотни- ка, гидроцилиндр поворота стрелы и рукояти, линии питания которых соединены с первым и вторым гидроТекущие значения угловой; и /3; так- 25 электрозолотником, отличаюже подставляются в выражение (6) и ЕМУ вычисляет координаты, зубьев ков- ша X , и Y. .
Процесс отслеживания системой продолжается до тех пор, пока имеется равенство Х R, + Н ctg, т.е. цикл выборки грунта по заданнЪму профилю забоя закончен и система проверяет не выбран ли грунт на максимальном радиусе копания экскаватора (X, - Rn,(.,,j 0). Если нет, то рабочее оборудование возвращается в исходную позицию. Для этого включается гидроцилиндр подъема стрелы до положения, когда угол ее подъема будет равен начальному | . После получения, равенства ) включается гидроцилиндр поворота экскаватора на 90°. После реализации этой команщ е е с я тем, что, с целью повышения производительности путем автоматизированного выполнения зачис ньпс и планировочных работ, оно сна
30 жено дополнительным датчиком угла поворота, гидроцилиндром открывани днища ковша, тремя дополнительными усилителями, четвертым золотником, комт- утатором аналоговых сигналов,
„g аналого-цифровым преобразователем, блоком микропроцессорного управления и пультом оператора, причем тр потенциометричесв:их датчика подклю чены к трем коммутатора ана
4Q логовых сигналов, гидроцилиндр открывания днища ковша соединен лики ми питания с третьим золотником, а линии питания гидродвигателя пов рота экскаватора соединены с четве
50
ды включается гидроцилиндр открывания 45 гидроэлектрозолотником, выход днища ковша 6 и реверсируется гидродвигатель 7 поворота экскаватора (соответствующим электромагнитом 22 переключается гидрораспр делитепь 26), После реализации этой команды ( Р 0) включается гидроцилиндр опускания рукояти до положения 0. Цикл закончен.
В дальнейшем процесс повторяется С введением в уравнение (3), (5) и (6) приращения h (толщины стружки ,грунта) до тех пор, пока имеется X,Rmo.x О, .при Y Н.
55
коммутатора аналоговых сигналов со динен через аналого-цифровой преоб разователь с входом блока микропро граммного управления, вход и выход которого подключены к пульту управ л.ения, а четыре, пары выходов блока микропрограммного управления через соответствующие двухканальные усилители соединены с обмотками управ ления электромагнитов гидроэлектро золотников, два выхода блока микро программного управления аналого-ци рового преобразователя и коммутато аналоговых сигналов.
При этом обработка закончена, на пульт машиниста ззьщае тся сигнал Обработка закончена и экскаватор управлением вручнукз перемещается на новую позицию вперед или в сторону.
Перемещения штоков гидроцилиндров стрелы по текущему значению угла /3; и соответствующие объемы масла, подаваемые в полости этих цилиндров в функции от угла /5 , определяются по зависимости (8) и (9).
Формула изобретения
Рабочее оборудование экскаватора, включающее стрелу с шарнирной опорой рукоять, соединенную шарниром со стрелой, причем в шарнирной опоре .стрелы и в шарнире крепления рукояти к стреле установлены датчики угла поворота, три гидроэлектрозолотни- ка, гидроцилиндр поворота стрелы и рукояти, линии питания которых соединены с первым и вторым гидрощ е е с я тем, что, с целью повышения производительности путем автоматизированного выполнения зачист- ньпс и планировочных работ, оно снабжено дополнительным датчиком угла поворота, гидроцилиндром открывания днища ковша, тремя дополнительными усилителями, четвертым золотником, комт- утатором аналоговых сигналов,
аналого-цифровым преобразователем, блоком микропроцессорного управления и пультом оператора, причем три потенциометричесв:их датчика подключены к трем коммутатора аналоговых сигналов, гидроцилиндр открывания днища ковша соединен ликия- ми питания с третьим золотником, а линии питания гидродвигателя поворота экскаватора соединены с четвер
гидроэлектрозолотником, выход
коммутатора аналоговых сигналов соединен через аналого-цифровой преобразователь с входом блока микропрограммного управления, вход и выход которого подключены к пульту управ- л.ения, а четыре, пары выходов блока микропрограммного управления через соответствующие двухканальные усилители соединены с обмотками управления электромагнитов гидроэлектро- золотников, два выхода блока микропрограммного управления аналого-цифрового преобразователя и коммутатора аналоговых сигналов.
Я max -Hctff/
Xi /
wa/
9и.г.г
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Г. И. Носова | 0 |
|
SU353002A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
