Изобретение относится к коксохимическому машиностроению, в частности, к устройствам автоматического управления движением коксовой машины.
Известны устройства для определения местоположения подвиЖНЫх объектов, содержащие передаюн1ую антенну с высокочастотным генератором, установленную на подвижном объекте, и расноложенную вдоль пути следования подвижного объекта приемную антенну, подключенную к преобразователю принимаемых сигналов в цифровой код и индикатор положения объекта.
Целью предлагаемого устройства является автоматизация дистанционлого управления движением коксовой машииы, что достигается тем, что преобразователь принимаемых сигналов в цифровой код подключен через диодную матрицу, контакты переключателей и инверторы к усилителям мощности с реле, контакты которых подключены к блоку передачи оперативных команд.
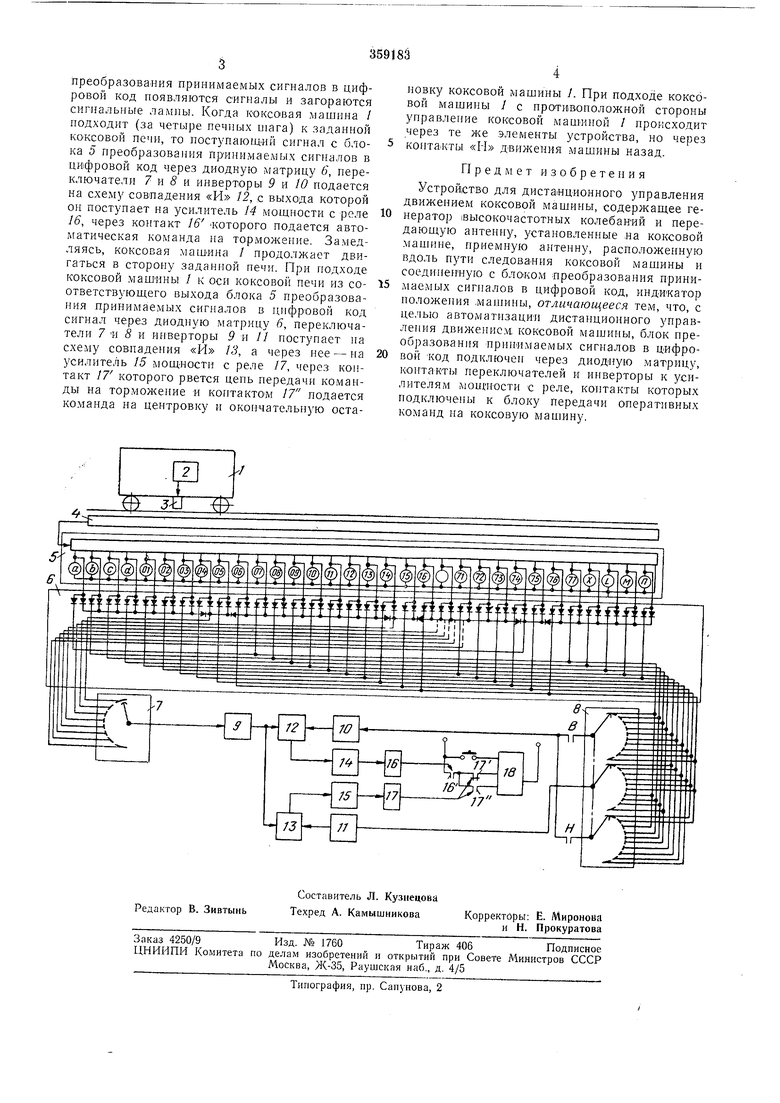
На чертеже представлена схема устройства для дистанционного управления движением коксовой машины. На подвижной коксовой мащине 1 установлен генератор высокочастотных колебаний 2, соединенный с передающей антенной 3, а вдоль нути следования мащипы / проложена приемная антенна 4, подклюненная к блоку 5 преобразования приниэдаемых сигналов в цифровой код. Блок 5 преобразования прин 1маемых сигналов в цифровой код представляет логическую схему и выполняет функцию выделен;ия н усиления нринимаемого сигнала, цреобразования его в цифровой код, дешифрования с последующей индикацией положения коксовой машины и подключен через диодную матрицу 6, переключатели 7 и 8, инверторы 9, 10 и 11, схемы совпадения «И 12 и /.3 к уснлителям 14 и 15 мощности с реле 16 и 17, через контакты 16, 17 и 17 которых включен блок 18 передачи команд па коксовую машину. Чтобы чувствовать направление движения коксовой машины 1 включепы контакты движения машины вперед «В, назад «Н.
Устройство работает следующим образом. Для автоматической остановки коксовой машины / оператор должен с помощью нереключателей 7 и 8 набрать номер коксовой печи, подлежащей обслуживанию и выдать команду (нанример, внеред) на движение коксовой машины в направлении этой печи. Нри движении коксовой машины I от генератора высокочастотных колебаний 2 посредством передающей антенны 3 в приемную антенну 4 передаются сигналы, поступающие на блок 5 преобразования принимаемых сигналов в цифровой Код. Нрн прохождении коксовой машины / над
преобразования принимаемых сигналов в цифровой код появляются сигналы и загораются сигнальные лампы. Когда коксовая машина / подходит (за четыре печных тага) к заданной коксовой печи, то поступаюЩИЙ сигнал с блока 5 преобразования прини.маел1ых сигналов в цифровой код через диодную матрицу 6, переключатели 7 и (S и инверторы 9 я W подается на схему совпадения «И 12, с выхода которой он поступает на усилитель 14 мощности с реле 16, через контакт 16 которого подается автоматическая команда на торможение. Замедляясь, коксовая маШИна / продолжает двигаться в сторону заданной печи. При подходе коксовой машины / к оси коксовой печи из соответствующего выхода блока 5 преобразования принимаемых сигналов в цифровой код сигнал через диодную матрицу 6, переключатели 7 И 8 и инверторы 9 и // поступает на схему совпадения «И 13, а через нее - на усилитель 15 мощности с реле 17, через контакт 17 которого рвется цепь передачи команды на торможение и контактом 17 подается команда на центровку и окончательную остаиовку коксовой машины 1. При подходе коксовой машины 1 с противоположной стороны управление коксовой мацжной / происходит через те же элементы устройства, но через контаКты «И движения .машины назад.
Предмет изобретения
Устройство для дистанционного управления движением коксовой машины, содержащее генератор высокочастотных колебаний и передающую антенну, установленные ,на коксовой мащине, приемную антенну, расположенную вдоль пути следования коксовой машины и соединенную с бло-ком преобразования принимаемых сигналов в цифровой код, индикатор положения аманшны, отличающееся тем, что, с целью автоматизации дистанционного управления движением коксовой машины, блок преобразования нрнНИ.маемых сигналов в цифровой код подключен через диодную матрицу, контакты переключателей и инверторы к усилителям мощности с реле, контакты которых нодключены к блоку передачи оперативных команд на коксовую машину.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления движением коксовой машины | 1980 |
|
SU882808A2 |
| Приёмо-передающий модуль радиотехнических сигналов | 2017 |
|
RU2661334C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| Устройство для дистанционного управления подвижным объектом | 1976 |
|
SU669375A1 |
| Устройство контроля работы коксовых машин | 1985 |
|
SU1393839A1 |
| УНИВЕРСАЛЬНАЯ ЦИФРОВАЯ УПРАВЛЯЮЩАЯ МАШИНА | 1965 |
|
SU170218A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КОНЦЕНТРАЦИИ ОПАСНЫХ ГАЗОВ | 2015 |
|
RU2638915C2 |
| ПОДВИЖНАЯ СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ | 2020 |
|
RU2729037C1 |
| ВЫСОКОСКОРОСТНАЯ МНОГОКАНАЛЬНАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ КВ-ДИАПАЗОНА | 2021 |
|
RU2779148C1 |
