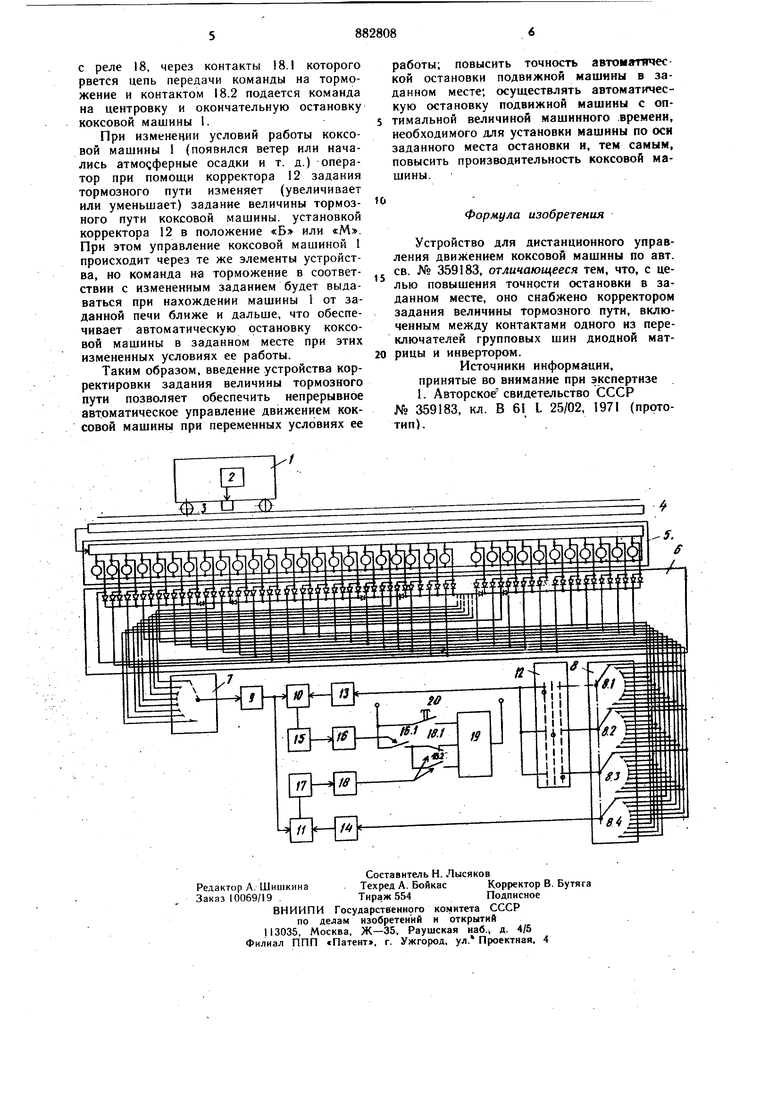
На чертеже представлена схема устройства для дистанционного управления движением коксовой машины.
На подвижной коксовой машине 1 уста новлеи генератор 2 высокочастотных колебаний, соединенный с передающей антеиной 3, а вдоль пути следования машины i проложена приемная антенна 4, подключенная к блоку 5 преобразования принимаемых сигналов в цифровой, код. Блок 5 выполняет функцию выделения и усиления принимаемого сигнала, преобразования его в цифровой код, дешифрования с последующей индикацией положения коксовой машины. Вых,оды блока 5 подключены к групповым шинам диодной матрицы 6.
Групповые шины десятков диодной матрицы 6 подключены к неподвижным контактам переключателя 7, а групповые шины единиц диодной матрицы 6 подключены к неподвижным контактам переключателя 8, который содержит четыре одинаковые платы контактов 8.1, 8.2, 8.3, 8.4. Подвижные контакты всех плат жестко связаны между собой и рукояткой переключателя. Одноименные неподвижные контакты всех плат подключены к разным групповым шинам единиц диодной матрицы 6. Так, неподвижные контакты 8,4 платы подключены через матрицу 6 к тем выходам блока 5, которые обеспечивают сигнализацию нахождения подвижной машины 1 у заданной печи (номер контакта платы соответствует наименованию единицы в сигнализируемом номере печи). При этом одноименные контакты 8.2 платы через матрицу 6 подключены к тем выходам блока 5, которые обеспечивают сигнализацию печей, находящихся до заданной печи на расстоянии, равном величине тормозного пути машины при нормальных условиях (безветренно, рельсовый путь сухой и ровный), например за шесть печных шагов, а одновременные контакты 8.1 и 8.3 платы - к выходам блока 5, обеспечивающим сигнализацию печей, находящихся, например, за семь и пять печных шагов, соответственно. Выбранные числа печных шагов (семь, шесть и пять), определяющие тормозной путь коксовой ма шины, приведены в качестве примера. Они зависят от количества приводных колес машины, используемой системы торможения и т. д. и определяются опытным йутем при наладке.
Подвижной контакт переключателя 7 через инвертор 9 подключен на первые входы схем 10 и 11 совпадения И, подвижные контакты 8.1, 8.2 и 8.3 плат переключателя 8 через корректор 12 задания величины тормозного пути и инвертор 13 подключены на второй вход схем 10 совпадения И.
Подвижный контакт 8.4 платы переключателя 8 через инвертор 14 подключен на второй вход,, схемы 11 ;совпадения И.
Выход схемы 10 включен на вход усилителя 15, нагрузкой которого является реле 16.с контактами 16.1, а выход схемы 11 включен на вход усилителя 17, нагрузкой которого является реле 18 с контактами 18.1 и 18.2. Контакты 16.1, 18.1 и 18.2 реле 16 и 18 включены на вход блока 19 пере-, дачи команд на коксовую машину. Кнопка 20 на входе блока 19 осуществляет подачи команды на движение коксовой маШИНЫ.
в качестве корректора 12 задания величины тормозного пути могут быть использованы, например, многопозиционный универсальный переключатель или устройства, информирующие об изменении условий движения (датчики направления и напора ветра, датчики изменения коэффициента сцепления ходового колеса машины с рельсом, датчики уклона рельсового пути и т. д.). Устройство работает следующим обра0 зом.
/ Для автоматической остановки коксовой, фашины 1 при нормальных условиях (безветренно, рельсы сухие и т. д.) оператор должен выставить корректор 12 задания тормозного пути в положение «Н («Норма), а затем с помощью переключателей 7 и 8 набрать номер коксовой печи, подлежащей обслуживанию, и выдать команду на движение коксовой машины в направлении этой печи.
0 При движении коксовой машины 1 -рт генератора 2 высокочастотных колебаний посредством передающей антенны 3 в приемную антенну 4 передаются сигналы, поступающие на блок 5 преобразования принимаемых сигналов в цифровой код. При
5 прохождении коксовой машины I над участками коксовых печей на выходе блока 5 появляются сигналы и загораются сигнальные лампы. Когда коксовая машина 1 подойдет к заданной печи на расстояние заданного тормозного пути (например, за шесть печных шагов), то сигнал с блока 5 преобразования принимаемых сигналов в цифровой код через диодную матрицу 6, контакт переключателя 7 и контакт 8.1 платы переключателя 8, а также через контакт корректора 12 задания тормозного пути и инверторы 9 и 13 подается на схему 10 совпадения И, с выхода которой он поступает на усилитель 15 с реле 16, через контакт 16.1 которого посредством блока 19. передачи команд на коксовую машину автоматически подается команда на торможение. Замедляясь, коксовая машина 1 продолжает двигаться в сторону заданной печи. При подходе коксовой машины 1 к оси этой коксовой печи из соответствующего выхода блока 5 сигнала через диодную матрицу 6, переключатели 7 и 8 и инверторы -9 и 14 поступает на схему 11 совпадения И, а через нее - на усилитель 17
с реле 18, через контакты 18.1 которого рвется цепь передачи команды на торможение и контактом 18.2 подается команда на центровку и окончательную остановку коксовой машины 1..
При изменении условий работы коксовой машины 1 (появился ветер или начались атмо ;ферные осадки и т. д.) оператор при помощи корректора 12 задания тормозного пути изменяет (увеличивает или уменьшает) задание величины тормозного пути коксовой машины, установкой корректора 12 в положение «Б или «М При этом управление коксовой машиной 1 происходит через те же элементы устройства, но команда на торможение в соответствии с измененным заданием будет выдаваться при нахождении машины 1 от заданной печи ближе и дальше, что обеспечивает автоматическую остановку коксовой машины в заданном месте при этих измененных условиях ее работы.
Таким образом, введение устройства корректировки задаиия величины тормозного пути позволяет обеспечить непрерывное автоматическое управление движением коксовой машины при переменных условиях ее
работы; повысить точность автоматпчес кой остановки подвижной машины в заданном месте; осуществлять автоматическую остановку подвижной машины с оптимальной величиной машинного времени, необходимого для установки машины по оси заданного места остановки н, тем самым, повысить производительность коксовой машины.
o
Формула изобретения
Устройство для дистанционного управления движением коксовой машины по авт 5 св. № 359183, отличающееся тем, что, с целью повышения точности остановки в заданном месте, оно снабжено корректором задания величины тормозного пути включенным между контактами одного из переключателей групповых шин диодной матрицы и инвертором.
Источники информации, принятые во внимание при экспертизе 1. Авторскоесвидетельство СССР № 359183, кл. В 6 L 25/02, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОКСОВОЙ МАШИНЫ | 1972 |
|
SU359183A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1978 |
|
SU768758A2 |
| Устройство для дистанционного управления и контроля двухпозиционных объектов с блоками защиты | 1984 |
|
SU1226568A1 |
| Программное устройство обслуживания коксовых печей и затворов угольной башни | 1980 |
|
SU887619A2 |
| Коммутатор | 1984 |
|
SU1175023A1 |
| Электрическая передача электровоза | 2017 |
|
RU2674998C1 |
| Устройство для управления загрузкой бункеров сыпучим материалом | 1983 |
|
SU1114604A2 |
| Устройство для измерения коэффициента прямоугольности амплитудно-частотной характеристики радиоприемника | 1985 |
|
SU1354135A1 |
| Пересчетное устройство | 1989 |
|
SU1667245A1 |
| Устройство для слежения за положением кабины лифта | 1986 |
|
SU1348286A1 |
