1
Изобретение отнЬсится к коксохимическому машиностроению и предназначено для дистанционного контроля и управления работой механизмов углезагрузочного вагона коксовых печей.
Чрезвычайно тяжелые условия работы на коксовых печах (высокая температура и загазованность среды) делают задачу полной механизации и автоматизации загрузки коксовых печей угольной шихтой особенно актуальной.
Известен вагон для загрузки коксовых печей, содержащий автономные программные узлы, регулирующие работу групп механизмов по набору щихты в бункеры вагона, транспортированию шихты к печи, загрузке шихты в печь, обслуживанию стояков, а также дополнительные программные узлы очередности обслуживания коксовых печей и затворов угольной бащни и корректировочные узлы 1.
Известно также устройство для управления работой установки по производству кокса.
Согласно этому техническому решению коксовые батареи снабжены вычислительной машиной, получающей сигнал от коксовыталкивателя и коксовой вагонетки. Каждая коксовая батарея имеет свое заданное время коксования. Вычислительная машина препятствует открыванию дверей коксовых печей до истечения минимального времени коксования. Она содержит программу загрузки в зависимости от реального хода коксования и может полностью автоматически управлять одновременно всеми операциями загрузки и разгрузки 2.
Известно устройство для питания коксовых печей, содержащее транспортер с напорным резервуаром, снабженный подвесным устройством. Транспортер наполняется таким количеством угля, которое соответствует содержимому камеры коксовой печи. Из транспортера уголь в соответствии с программой может автоматически подаваться через соответствующую транспортирующую линию в расположенное на печной камере разделительное устройство, а оттуда
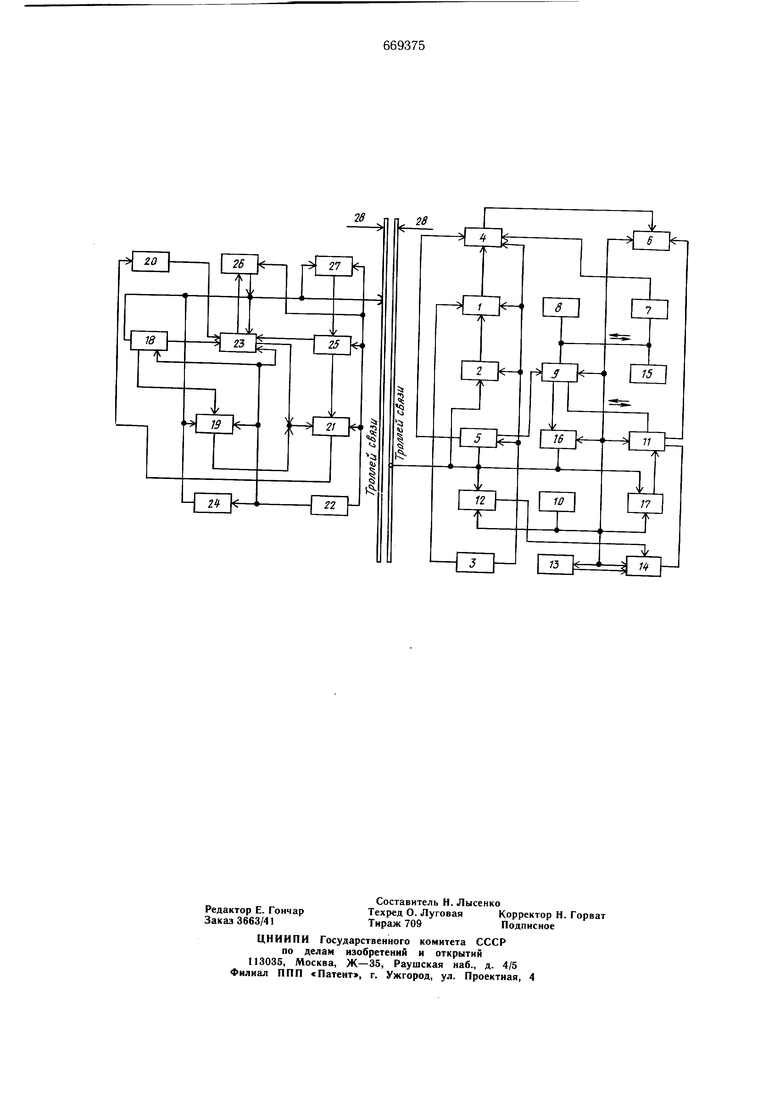
0 под дейстЕим силЪ тяжести - в загрузочные отверстия соответствующей камеры. Устройство отличается тем, что между транспортером с напорным резервуаром и установленными на печной камере разлс ли тельным и устройствами расположена многоходовая расг1ре,аелительная станция, автоматически перемешаемая с помощью электродвигателя 3. Недостатком известных способов и устройств является решение поставленной задачи. Автоматизация загрузки коксовых нечей утнмп способами и устройствами является сложной и недостаточно надежной. Наиболее близким к изобретению устройством яв,1яется устройство для дистанционного управ:1ения подвижным объектом, содержащее на подвижном объекте: генератор высокой частоты, блок кодирования и приемник, первые входы которых подключены к источнику питания, выход ириемника соединен с вторым входо.м блока кодирования, и блок исполнительных элементов, расположенную вдо.чь пути движения подвижного объекта антенну связи: на операторском пункте: приемник, первый вход которого подключен к выходу-источника питаНИИ, выход - к первому входу блока кодирования, и генератор высокой частоты 4. Это устройство характеризуется невысокой надежностью и .малыми функциональными возможностями применяемой аппаратуры (обусловленными использованием принципа временного кодирования сигналов), а также неполным, частичным регпением задачи автоматизации загрузки коксовых печей (осуществляется управление только движением коксовых машин, а вопросы унравления погрузкой не решены). Целью изобретения является повышение надежности усгронства за счет повышения точности контроля и обеспечение автоматизированного управления всеми процессами погрузки шихты простыми и надежными средствами. Достигается это тем, что в устройство на подвижном объекте введены блок разрешения загрузки, блок центровки подвижного объекта, блок центровки и опознавания, блок сигнализации, блок разрешения загрузки и переключатель програ.мм, первый вход которого, второй вход приемника, первые входы блока центровки подключены к обшей точке соединения выхода генератора высокой частоты, первого выхода блока центровки и опознавания и выхода блока разрешения загрузки, подключенного к антенче связи, первые выходы переключателя программ и блока центровки соединены с первым входом блока исполнительных элементов, второй и третий входы которого соединены, соответстве 1ио, с источником питания и с первы.м выходом блока кодирования, выход блока исполнительных элементов подключен через блок сигнализации к второму входу переключателя программ, пятый и третий входы которого соединены, соответственно, с треть им выходом б.чока центровки и опознавания и с вторым выходом блока кодирования, второй выход переключателя програ.мм п()дс(;едипен к второму входу генератора высокой частоты, источник питания подключен к входу блока разреп ения загрузки, к второму входу блока центровки, к четвертому входу переключателя программ и к входу блока центровки и. опознавания, второй выход которого соединен с третьим входо.м блока центровки; на операторском пункте введены блок переключения счета и опознавания, табло, блок управления передвижением, блок управления передвижением, блоки управления загрузкой, блоки индикации, задатчик программ, счетчик меток, блок подготовки подвижного объекта, блок, разрешения загрузки, элемент сброса и мнемос.хе.ма, первый вход которой и первый вход табло подключены к выходу блока кодирования, подключенного к задатчику программ, соединенно.му с блоком управления передвижением, первым блоко.м управления загрузкой, в|)1ход которого подключен к первому входу блока переключения счета и опознавания, выход которого соединен с вторым входом табло, элемент сброса, выход которого подключен к первому входу счетчика меток, а вход - к входу второго блока подготовки подвижного объекта, к второму входу второго блока индикации, к счетчику меток, блоку переключения счета и опознава1шя: выход генератора высокой частоты и первый выход блока подготовки подвижного объекта подключены к первому входу блока разрешения загрузки, к антенне приемника и к первому входу второго блока индикации, выход которого соединен с третьим входом счетчика меток, выход которого подключен к третьему входу блока переключения счета и опознавания, второй и третий выходы блока подготовки подвижного объекта соединены, соответственно, с ч етвертым входом блока переключения счета и опознавания и с первым входом задатчика программ, источник питания подключен к генератору высокой частоты, блоку кодирования, задатчику программ, табло, третьему блоку индикации, блоку разреше1шя загрузки и мнемосхеме, подключенной к выходу третьего блока индикации и к выходу блока разрешения загрузки. На чертеже представлена блок-схема устройства. На операторском пункте находятся счетчик меток I, второй блок индикации 2, элемент сброса 3, блок 4 переключения счета и опознавания, блок 5 подготовки подвижного объекта, табло 6, первый блок 7 управления загрузкой, блок 8.управления передвижением, задатчик программ 9, источник питания 10, блок кодирования 11, блок 12 разрешения загрузкой, третий блок индикации 13, мнемосхема 14, второй блок 15 управления загрузкой, генератор 16 высокой частоты, приемник 17 высокочастотных сигналов. На подвижном об1)екте (т; с:загрузочный вагон) установлены блок 18 ueirrpoBKi-; и опознавания, блок центровки 19, б.чок сигнализации 20, блок 21 исполнительных элементов, источник нитания 22, переключатель программ 23, блок 24 разрешения загрузки, блок кодирования 25, генератор 26 высокой частоты, приемник 27 высокочастотных сигналов, антенна связи 28 между операторским пунктом и подвижным объектом. Устройство работает следуюн им образом В исходном состоянии подвижный объект (углезагрузочный вагон) находится под угольной башней, счетчик меток сориентирован на «О элементом сброса, содержаш.ий датчик и воздействующий элемент, установленный на пути вагона под башней, задатчик программ 9 и переключатать программ 23 переключены в положение «загрузка, в результате чего блок сигнализации 20 подключен к источнику питания 22 и блоку кодирования 25, а первый блок 7 управления загрузкой - к источнику питания iO и блоку кодирования II, осуществляя двух стороннюю передачу команд к сигналов управления механизмами погрузки вагона. После установки вагона по оси какоголибо ряда затворов угольной бащни из oneраторского пункта поступает команда на открывание затворов бункеров башни и угольная шихта из башни самотеко.м попадает в вагон. Потоки угольной nuiXTbi воздействуют на датчики схода шихты. Для обрун1ения шихты из бап1ни в вагон и для выгрузки ее из вагона в печь используются одни и те же кнопки и команды на операторском пункте. Эти команды шифруются с помощью задатчика программ 9, блока кодирования 11, источника нитания 10 и второго блока 15 управления загр зкой; кодированные сигналы с помощью генератора 16 высокой частоты преобразуются в посылки тональной частоты (порядка 20 кгц), по антенне 28 попадают в вагон и на прие.мник 27 высокочастотных сигналов и дешифруются с помощью блоков 23, 22, 25 и 21. Одновременно сигналы блока сигнализации 20 через блоки 23, 24, 25, 26 преобразуются в посылки другой тональной частоты (порядка 14 кгц), и на операторском пункте принимаются через ту же антенну и декодируются блокаКш 9, 10, 11, 14 и15.На .мнемосхеме 14 оператор наблюдает появление последоватльно сигналов «заполнение бункеров, «сход Н1ИХТЫ, «снятие крышек люков, «включение автоматической выгрузки, «исходное состояние. Во вре.мя аключения ко.манды «сход шихты («набор ) оператор одной и той же кнопкой по.дключает выходы счетчика меток 1 к табло 6, отключает от табло 1 выходы блока кодирования 11, тем самым подготавливая устройство к программе «передвижение. 1 l()c,ie Hano.iiftMim всех бункеров вагона (нихтой, о чс-: си;|доге;1-1.тнует cnriia.i «исходное состояние, оператор нажимает педа,1ь прсд предите.1ьно1о сигнала, которая одновременно переключает задатчик программ 9 на режим «передвижение с помощью блока подготовки подвижного объекта 5. При этом, в вагоне соответственно переключаются переключатель программ 23, что осуществляется подачей из блока 5 в антенну 28 и в вагон однополупериодного выпрямленного напряжения положительной полярности. Переводя контролер в блоке 8 управления передвнжение.м в ряд положений, оператор доводит скорость вагона до номинальной величины. Передача соответствующих команд механизмам привода вагона производится на операторском iiyHKTe блоками 8, 9, 10, 11 и 16 и на вагоне синхронно работающими с ними блоками 22, 24, 26 и 21. В результате это напряжение питания отключается от реле механизмов погрузки и передается на реле .механизмов передвижения. Во время перемещения углезагрузочного вагона по верху коксовой батареи бесконтактные датчики положения, имеющиеся в блоке 18 центровки и опознавания, в момент нахождения вагона над метками коксовых печей (представляющими собой ферромагнитные щунты) выдают сигналы, поступающие непосредственно через антенну 28 в второй блок индикации 2, а оттуда в счетчик меток 1 и через блок 4 переключения счета и опознавания сигналы поступают на табло 6. Оператор по сигнальным лампам следит за движением вагона и при приближении к нужной печи дает команду торможения. В момент наезда вагона на метку печи, надле.жащей загрузке, оператор включает команду «автоматическая центровка с помощью блока центровки 19, после чего вагон центруется но оси печи. По этой же команде с помощью блока 4 переключения счетчика и опознавания происходит отключение выхода счетчика меток 1 от табло 6 и подключение последнего к выходу блока кодирования 11. В момент центровки кодовые датчики меток печей блока 18 опознавания и центровки взаимодействуют с блоками 22, 23, 25, 26 и через антенну 28 частотные посылки с фазовременным кодированием поступают на операторский пункт, где декодируются и дешифрируются блоками 9, 10, 11, 17 и 6, работающими синхронное аналогичными блоками вагона. На табло 6 отображается номер именно той печи, на которой находится углезагрузочный вагон. Затем программа переключается на загрузку печи и осуществляется подача и прием команд и сигналов управления погрузкой с помощью блоков 7, 9, 10, 11, 16 и 17 на операторском пункте, а на вагоне - с помощью блоков Ш, 22, 23, 24, 26, 27. В вагоне включаются соответствующие реле исполнительных элементов 21, на операторском пункте на мнемосхеме 14 загораются сигнальные лампы, отражающие состояние этих механизмов. По окончании выгрузки угольной 1ПИХТЫ в печь все механизмы погрузки ириходят в исходное состояние, оператор нажимает педаль звонка и переключает ирограмму на «передвижение. Описанным выше способом осуществляется включение реле исполнительных .механизмов, а перемеп1ение вагона уже в обратном направлении (для загрузки новой порции П1ихты под угольной бащней) наблюдается по табло 6. Далее работа повторяется.
Такое выполнение устройства обеспечивает по,-1учение слелуюп его положительного эффекта: значите.льпо повьпиается надежность к()нтр(),-1я благодаря совместному применению число-импу.-1ьсного (счетчик меток) и кодо-имиульсног{) (блок кодирования) npniHuinoB передачи сигналов с к()дов()1 меток иечей, распп1ряются фупкциоиальпряе возможности аппаратуры за счет дополпптельпых каналов связи (сразовременпое ко.ифоваиие) и улучюаются условия труда за счет применения простых и надежных средств дистанционной передачи, не требующих часто1-о или постоянного ирисутствия 1г)г. ;у/кив;пои1его персонала (маи1инистов Bciioha, |)емонтных рабочих и т. д.). Все это новьинает надежность управления загрузочными nponecca.vni на коксовых батаГХЯХ.
Формула и:1обрегения ,стройство для дистаниионного управления подвижным объектом, содержащее на подвнжном объекте генератор высокой частоты, блок кодирования и приемник, первые входы которых подключены к источнику питания, выход приемника соединен с вторым входом блока кодирования и блок исполнительных элементов, расположенную вдоль пути движения подвижного объекта антенну связи; на операторском пункте - приемник, первый вход которого подключен к выходу источника питания, выход - к перво.му входу блока кодирования, и генератор высокой частоты, отличающееся тем, что, с целью повышения надежности устройства, в него на подвижном объекте введены: блок разрешения загрузки, блок центровки подвижного объекта, блок центровки и опознавания, блок сигнализации, блок разрешения :5агрузки и нерек,пючатель програм.м, первый вход которого, второй вход приемника, первые входы блока центровки подключены к оби1ей точке соединения выхода генератора высокой частоты, первого выхода блока центровки и оиозиавания и выхода блока разрешения загрузки, иодключеиного к антенне связи, первые выходы переключателя программ и блока центровки соединены с первым входом блока исполнительных элементов, второй и третий входы которого соединены, соответственно, с источником иитання и с первым выходом блока кодирования, выход блока исполнительных элементов подключен через блок сигнализации к второму входу переключателя ирограм.м, пятый и третий входы которого соединены, соответственно, с третьим выходом блока центровки и опознавания и с вторым выходом блока кодироващ1я, второй выход переключателя программ подсоединен к второму входу генератора высокой частоты, источник питания подключен к входу блока разрешения загрузки, к второму входу блока центровки, к четвертому входу переключателя программ и к входу блока центровки и опознавания, второй выход которого соединен с третьим входом блока центровки; на операторском пункте введены блок переключения счета и опознавания, табло, блок управления передвижением, блоки управления загрузкой, блоки индикации, задатчик програ.мм, счетчик меток, блок подготовки подвижного объекта, блок разрешения загрузки, элемент сброса и мнемосхема, первый вход которой и первый вход табло подключены к выходу блока кодирования, подключенного к задатчику программ, соединенному с блоком управления передвижением, первым блоком управлерп-гя загрузкой, выход которого подключен к перво.1у входу блока переключения счета и опознавания, выход которого соединен с вторым входом табло, элемент сброса, выходы которого подключены к первому входу счетчика меток, а вход - к входу блока подготовки подвижного объекта, к второму входу второго блока индикации, к счетчику меток, блоку переключения счета и опознавания; выход генератора высокой частоты и иервый выход блока подготовки подвижного объекта подключены к первому входу блока разреи1ения загрузки, к антенне приемника и к первому входу второго блока индикации, выход которого соединен с третьим входом счетчика меток, выход которого подключен к третьему входу блока переключения счета и опознавания, второй и третий выходь блока юдготовки подвижного объекта соединены, соответственно, с четвертым входо.м блока переключения счета и опознавания и с первым входом задатчика программ, источник питания подключен к генератору высокой частоты, блоку кодирования, задатчику программ, табло, третье.му блоку индикации, блоку разрешения загрузки и мнемосхеме, подключенной к выходу третьего блока индикации и к выходу блока разрешения загрузки.
Источники информации, принятые во внимание нри экспертизе
1.Авторское свидетельство СССР .YO 361190, кл. С 10 3 31/02.
2.Патент Франции № 2186520, кл. С 10 В 45/00.
3.Патент ФРГ №2217478, кл. 10 А 11/01.
4.Авторское свидетельство СССР Л 394408, кл. С 10 В 31/04.
Г
26
27 61

| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1978 |
|
SU768758A2 |
| Программное устройство очередностиОбСлужиВАНия КОКСОВыХ пЕчЕй и зАТВОРОВугОльНОй бАшНи | 1979 |
|
SU802352A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1977 |
|
SU684057A2 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1981 |
|
SU998489A2 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1983 |
|
SU1110795A2 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
| Устройство для определения положения коксовых машин | 1981 |
|
SU1006473A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1977 |
|
SU691481A2 |
| ПРОГРАММНОЕ УСТРОЙСТВО ОЧЕРЕДНОСТИ ОБСЛУЖИВАНИЯ КОКСОВЫХ ПЕЧЕЙ И ЗАТВОРОВ УГОЛЬНОЙ БАШНИ | 1972 |
|
SU360358A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1976 |
|
SU653285A2 |
L 18
2
23
4ZH
21 fe
- 2« -
