Устройство относится к системам автоматического контроля и регулирования.
Известны датчики перемещений, содержащие постоянный магнит, на торцах которого установлены стержневые полюсные наконечники, и магниторезисторы, между которыми расположен якорь.
Описываемое устройство отличается тем, что в нем на торцах полюсных наконечников закреплены П-образные магнитопроводы, на внутренних поверхностях параллельных стержней которых расположены магниторезисторы.
Такое выполнение позволяет повысить чувствительность магниторезистивного датчика.
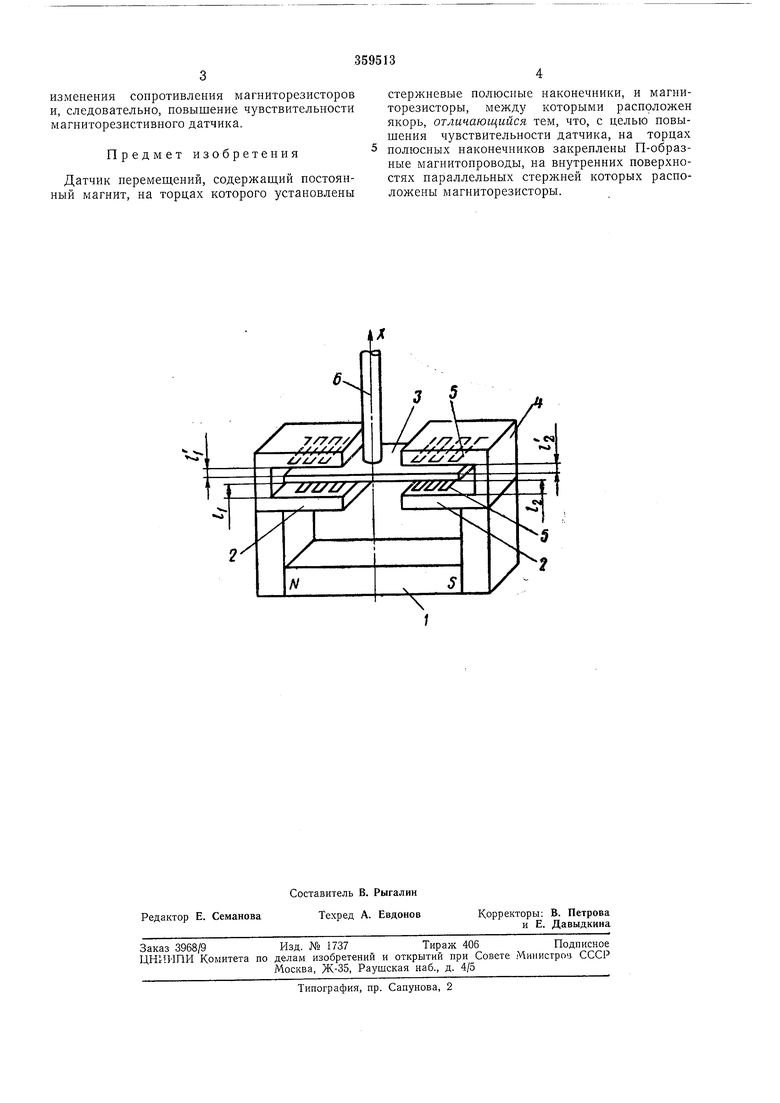
На чертеже приведено схематичное изображение описываемого устройства.
Оно содержит постоянный магнит 1, полюсные наконечники 2, якорь 3, П-образные магнитопроводы 4, магниторезисторы 5 и щток 6.
Полюсные наконечники 2 постоянного магнита / заканчиваются П-образными магнитопроводами 4, между параллельными стержнями которых располагается подвижный якорь 3, образующий с полюсами воздушные зазоры /1 и // с одной стороны и /2 и /г с другой стороны. На внутренних поверхностях параллельных стержней П-образных магнитопровоаов 4, обращенных к якорю 3, расположены магниторезисторы 5. Постоянный магнит /, полюсные наконечники 2, П-образные магнитопроводы 4 и якорь 3 с воздушными зазорами образуют магнитную цепь системы.
В зависимости от положения якоря 3 магнитный поток может преобладать в зазорах /1 и li или /2 и /г или быть одинаковым во всех зазорах.
Принцип работы датчика заключается в следующем.
Внешняя сила в направлении оси X воздействует на шток 6, жестко связанный с якорем 3, и вызывает перемещение якоря. Так как якорь также является частью магнитной системы датчика, то при его движепии, например, вверх проводимость верхних зазоров увеличивается, а нинчних - уменьшается. При этом магнитные потоки Ф и Ф в зазорах перераспределяются пропорционально проводимостям.
При перемещении якоря из крайнего нижнего в крайнее верхнее положение зазор /j изменяется от О до /1, а магнитный поток в нем изменяется от значения Ф до О, и наоборот. (Аналогичное изменение величин ti и Ф происходит при обратном движении якоря).
Так как магниторезисторы расположены на путн магнитных потоков Ф и Ф, то при полном перемещении якоря они пересекаются потоками, изменяющимися от О до Ф (от Ф до
изменения сопротивления магниторезисторов и, следовательно, повышение чувствительности магниторезистивного датчика.
Предмет изобретения
Датчик перемещений, содержащий постоянный магнит, на торцах которого установлены
стержневые полюсные наконечники, и магниторезисторы, между которыми расположен якорь, отличающийся тем, что, с целью повыщения чувствительности датчика, на торцах полюсных наконечников закреплены П-образные магнитопроводы, на внутренних поверхностях параллельных стержней которых расположены магниторезисторы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик давления | 1976 |
|
SU577416A1 |
| Датчик угла поворота вала | 1979 |
|
SU773426A1 |
| Датчик давления | 1974 |
|
SU514217A1 |
| Датчик перемещений | 1974 |
|
SU510645A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| Датчик угла поворота | 1989 |
|
SU1702170A1 |
| Датчик перемещения | 1974 |
|
SU507776A1 |
| Датчик угла поворота вала | 1985 |
|
SU1298526A1 |
| Магнитомодуляционный преобразователь перемещений | 1986 |
|
SU1413406A1 |
| Головка звукоснимателя | 1982 |
|
SU1083414A1 |
