Изобретение относится к измерительной технике и может быть использовано в качестве первичного преобразователя угла поворота в электрический сигнал.
Известен датчик угла поворота, содержащий установленные соосно торцами два кольцевых магнитопровода, ольцевой постоянный магнит, расположенные по окруж- ности зубцы, пары смещенных один относительнодругого на четверть зубцового деления магниточувствительных элементов, соединенных электрически в две группы Магниточувствительные элементы каждой группы расположены равномерно по окружности, причем разность между шагами расположения магниточувствительных элементов, принадлежащих к одной группе постоянна.
Недостатком такого датчика является низкая точность измерений вследствие содержания в выходных сигналах паразитных пространственных гармоник некратных числу зубцов обусловленных технологическими погрешностями изготовления зубцов и неравномерным характером расположения, магниточувствительных элементов
Известен датчик угла поворота, содержащий установленные соосно торцами друг к другу два кольцевых магнитопровода. кольцевой постоянный магнит равномерно расположенные по окружности торцовые зубцы, группы из последовательно соединенных и равномерно расположенных по окружности магниторезисторов смещенных один относительно другого на четверть зубцового деления Магниторезисторы выполнены зигзагообразными с равномерным
VI
О
ю
о
шагом и огибающей в виде полуволны синусоиды с длиной,равной половине зубцового деления.
Недостатком такого датчика является низкая точность измерений вследствие содержания в выходных сигналах ряда паразитных пространственных зубцовых гармоник, некратных числу зубцов.
Наиболее близкими к предлагаемому техническому решению является датчик угла поворота вала, содержащий установленные соосно торцами друг к другу первый и второй кольцевые магнитопроводы П-образ- ного сечения, кольцевой постоянный магнит и выполненные равномерно по окружности зубцы на первом кольцевом магнитопроводе, группы магниточувствительных элементов, расположенные на втором кольцевом магнитопроводе, магниточувствительные элементы каждой из групп расположены равномерно по окружности, соединены между собой последовательно и смещены относительно магниточувствительных элементов соседней группы на четверть зубцового деления.
Недостатком такого датчика является низкая точность измерений вследствие содержания в выходных сигналах ряда паразитных пространственных гармоник, а также существенного влияния на них технологических погрешностей, изготовления зубцов и магниточувствительных элементов.
Цель изобретения - повышение точности измерений.
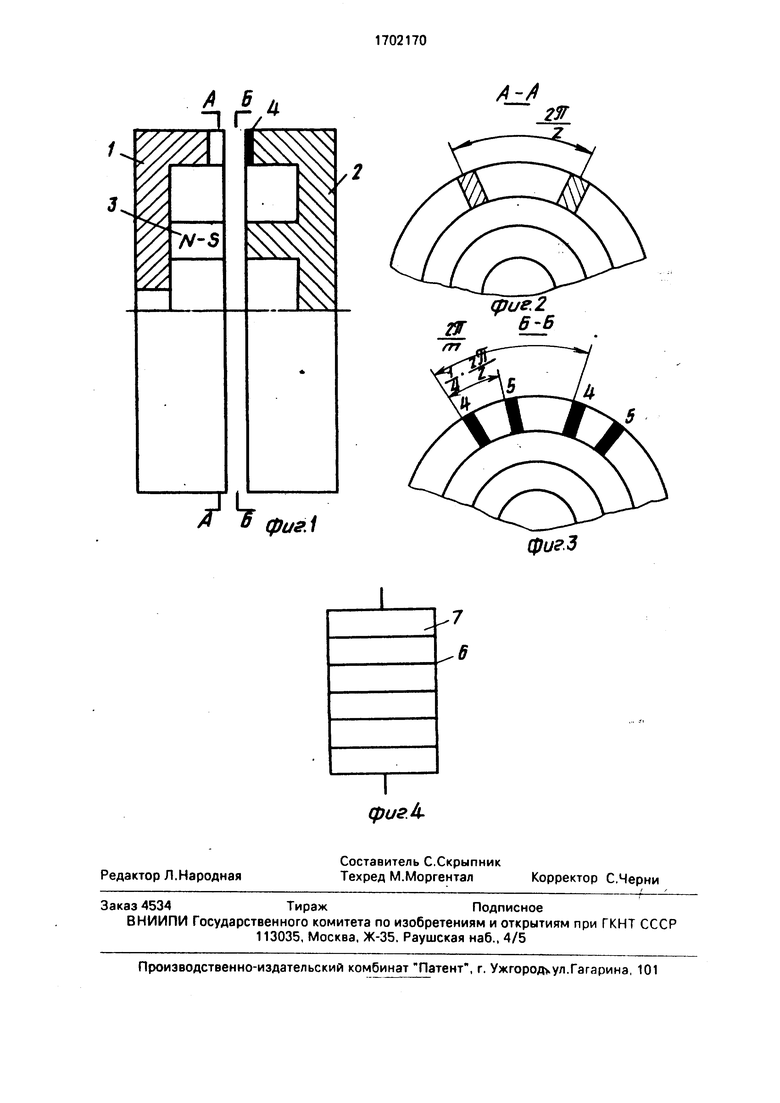
На фиг. 1 представлен датчик угла поворота, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - вариант выполнения магниточувствительных элементов в виде последовательно соединенных с помощью проводящих закороток магниторезистивных полосок.
Датчик угла поворота содержит два кольцевых магнитопровода 1 и 2, установленных соосно и разделенных зазором. Магнитопроводы имеют П-образную форму поперечного сечения и установлены торцами один к другому. На внутреннем торце магнитопровода 1 установлен кольцевой постоянный магнит 3. Внешний торец магнитопровода 1 содержит Z равномерно расположенных по окружности зубцов. На внешнем торце магнитопровода 2. сопряженном с внешним торцом магнитопровода 1, размещены группы последовательно соединенных магниточувствительных элементов 4 и 5, расположенных равномерно по окружности, магниточувствительные элементы 4 и 5 смещены один относительно
другого на четверть зубцового деления, т.е. на 0,5 л/Z рад.
Датчик угла поворота работает следующим образом. Магнитопровод 1 присоединен к валу (на чертеже не показан), а магнитопровод 2 закреплен неподвижно. Магнитное поле датчика создается постоянным магнитом 3. Величина магнитной индукции в зазоре между магнитопроводами 1
и 2 должна обеспечивать работу магниточувствительных элементов - магниторези- сторов 4 и 5 на линейном участке характеристики. Период изменения индукции для каждого магниторезистора при взаимном повороте магнитопроводов 1 и 2 соответствует зубцовому делению 2л/ /2.
Поскольку внешний торец магнитопровода 1 выполнен зубчатым, то закон изменения магнитной индукции в зазоре между
магнитопроводами 1 и 2 содержит помимо рабочей гармоники с периодом Inl 12. (номер К равен Z), паразитные пространственные гармоники и может быть описан математически в виде
Кмакс
В( а)В0+ 2 Bksin(Ka+), (1)
k 1
где а- угол поворота;
Во - амплитуда постоянной составляющей магнитной индукции;
Вк - амплитуда к-й пространственной зубцовой гармоники;
фаза к-й пространственной зубцовой гармоники; Кмакс номер высшей пространственной зубцовой гармоники, амплитуда которой еще подлежит учету.
При работе магниторезисторов на линейном участке характеристики 4 законы изменения их сопротивления линейно зависят от воздействующей магнитной индукции, поэтому в них содержатся наряду с постоянной составляющей и рабочей гармоникой паразитные пространственные гармоники.
Рассмотрим группу из m последовательно соединенных магниторезисторов, длина b 1-го магниторезистора (1 1. ... т) изменяется по закону
b bo(1+sln 2-),(2)
где bo - постоянная составляющая длины.
В предлагаемом датчику магниторези- сторы 4, 5 в каждой группе расположены равномерно по окружности, а соседние маг- ниторезисторы смещены на О.Бтг 12 рад. Поэтому, учитывая (1, 2) законы изменения суммарного сопротивления R4 (а) и R$(a ) групп магниторезисторов 4 и 5 имеют вид
R4( а) R0± mboBzcos(Z a z)(3) Rs(a ) Ro± mboBzsln(Za + ) (4)
где Ro - постоянная составляющая сопротивления, обусловленная постоянной составляющей магнитной индукции;
(fh - фаза рабочей гармоники магнитной индукции.
Таким образом, когда длина магнито- чувствительных элементов в группе изменяется по закону (2), достигается исключение из выходных сигналов датчика угла поворота паразитных пространственных гармоник, снижающих точность измерений.
Следует отметить, что при числе зубцов Z, кратном числу m магниточувствительных элементов в группе, выражение (2) принимает вид b bo, что соответствует прототипу, т.е. заявленное распределение длины является более общим случаем по отношению к прототипу.
При числе зубцов Z некратном m на интервале 2 л рад укладывается целое число п периодов закона (2), причем величины Z, m и п удовлетворяют соотношению Z im±n, где I - целое положительное число.
Технологические погрешности изготовления датчика характеризуются величиной допуска на линейное смещение осей зубцов и магниточувствительных элементов с расчетных положений. Величина соответствующего углового смещения, определяющая влияние этих параметров на выходные сигналы датчика, обратно пропорциональна диаметрам расположения зубцов и магниточувствительных элементов. В отличии от прототипа в предлагаемом датчике зубцы и магниточувствительные элементы расположены на внешних торцах магнитопроводов, диаметр которых превышает диаметр внутренних торцов. Следовательно, при одинаковом допуске технологические погрешности изготовления в данном датчике будут оказывать на выходные сигналы меньшее влияние, чем в прототипе.
Магниточувствительные элементы 4, 5 можно выполнить в виде магниторезисто- ров, состоящих из ряда последовательно со- единенных с помощью проводящих закороток 6 магниторезистивных полосок 7 (фиг. 4). Коэффициент преобразования таких магниторезисторов прямо пропорционален количеству полосок.
Современная технология микроэлектроники позволяет формировать в каждом магниторезисторе несколько десятков таких полосок, что обеспечивает аппроксимацию закона (2) с высокой точностью.
Таким образом, предлагаемый датчик преобразует угол поворота в электрические
сигналы с повышенной точностью даже при значительных технологических допусках на изготовление зубцов и магниточувствительных элементор,
Формула изобретения
1, Датчик угла поворота, содержащий установленные соосно и обращенные выступающими торцами один к другому с возможностью относительного вращения первый и второй кольцевые магнитопроводы П-образного сечения, на одном торце первого магнитопровода установлен кольцевой постоянный магнит, а на другом его торце выполнены равномерно расположенные по окружности зубцы, группы магниточувствительных элементов, которые в каждой группе расположены равномерно по окружности торца второго магнитопровода, соединены между собой последовательно и смещены относительно соседних магниточувствительных элементов другой группы на четверть зубцового деления первого магнитопровода, отличающийся тем, что с целью повышения точности, магниточувствительные элементы в каждой группе
выполнены переменной длины b bo(1+sin
2JTZ, ,
), где bo - среднее значение длины, i
- номер магниточувствительного элемента в группе (I 1, 2, ...т); т - количество магниточувствительных элементов в каждой группе, Z - число зубцов, постоянный магнит закреплен на внутреннем торце первого магнитопровода, а зубцы расположены на внешнем торце этого же мягнитопровода.
2. Датчик по п. 1,отличающийся тем, что, каждый магниточувствительный элемент в группе выполнен в виде последовательно соединенных магниторезистивных полосок, количество которых изменяется в зависимости от номера элемента в группе.
фиг.
А-Л
фиг.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла поворота | 1985 |
|
SU1268945A1 |
| Датчик угла поворота | 1986 |
|
SU1325296A1 |
| Датчик угла поворота вала | 1979 |
|
SU773426A1 |
| Датчик угла поворота вала | 1985 |
|
SU1298526A1 |
| Преобразователь угла поворота вала в код | 1979 |
|
SU858052A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| Датчик угла поворота вала | 1985 |
|
SU1263997A1 |
| Датчик угла поворота вала | 1986 |
|
SU1397715A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| ТРАНСФОРМАТОР С ТРЕХФАЗНОЙ И КРУГОВОЙ ОБМОТКАМИ | 2014 |
|
RU2567870C1 |
Изобретение относится к измерительной технике и имеет целью повышение точности преобразователя угла поворота в электрический сигнал Преобразователь содержит установленные соосно с возможностью относительного вращения два магни- топровода с П-образным поперечным сечением На внутреннем торце первого магнитопровода закреплен кольцевой постоянный магнит, а на внешнем его торце выполнены с постоянным шагом зубцы На внешнем торце второго магнитопровода размещены группы магниточувствительных элементов, которые выполнены с переменной длиной, изменяющейся по синусоидальному закону, период которого зависит от номера подавляемой гармоники магнитного поля Каждый магниточувствительный элемент может быть выполнен в виде последовательно соединенных магниторезистив- ных полосок количество которых изменяется в зависимости от номера элемента в группе 1 з п ф-лы. 4 ил СП С
| Датчик угла поворота | 1985 |
|
SU1268945A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик угла поворота вала | 1985 |
|
SU1263997A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
