(54) ДАТЧИК УГЛА ПОВОРОТА БАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла поворота | 1989 |
|
SU1702170A1 |
| Датчик угла поворота вала | 1985 |
|
SU1298526A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| Преобразователь угла поворота вала в код | 1979 |
|
SU858052A1 |
| Датчик угла поворота | 1985 |
|
SU1268945A1 |
| Датчик угла поворота вала | 1985 |
|
SU1263997A1 |
| Датчик угла поворота | 1986 |
|
SU1325296A1 |
| Датчик угла поворота вала | 1986 |
|
SU1397715A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| Преобразователь линейного перемещения в электрический сигнал | 1981 |
|
SU1012021A1 |
1
Изобретение относится к автоматике и вычислительной технике и может быть использовано для связи измеряемой аналоговой величины, представленной в виде угла поворота, с вычислительным устройством.
Известен преобразователь угла поворота вала в код, содержащий магнитомодуляционный датчик угла, выполненный в виде двух постоянных кольцевых магнитов, установленных концентрично с возможностью совместного поворота относительно св.оей оси, поверхности которых,обращенные друг к другу, выполнены в виде полюсных наконечников с линейно изменяющимся зазором между ними в зависимости от угла поворота вала, установленный в зазоре гальваномагнитный чувствительный элемент 1.
Недостатком такого преобразователя является низкая разрешающая способность и низкая точность измерения угла, вызванная наличием технологических погрешностей изготовления и установки датчика угла.
Известен преобразователь, содержащий магнитомодуляционный датчик, выполненный в виде двух концентрично с зазором расположенных магнитопроводных цилиндров, первый из которых имеет на внутренней
поверхности явно выраженные полюса, а второй, расположенный внутри него, имеет на наружной поверхности два гальваномагнитных датчика и охватывающий его соленоид 2.
Недостатком его является то, что он не позволяет производить измерение углового положения в широком диапазоне изменения угла с высокой точностью.
Наиболее близким по технической сущности к изобретению является датчик уг10ла поворота вала, содержащий два кольцевых магнитопровода, установленные соосно и разделенные зазором, магнитопроводы выполнены в виде зубчатых концентричных колец из постоянных магнитов с одинаковым
,5 числом зубцов треугольного профиля, причем, вершины зубцов постоянно расположены друг против друга, а гальваномагнитный датчик в виде магниторезистора, помещенный в зазоре, кинематически связан с входным валом 3.
20 Недостатком такого датчика является низкая точность измерения, так как в преобразовании угла поворота вала в электрический сигнал участвует лишь одна пара зубцов, воздействующих на магниторезистор, вследствие чего невозможно уменьшение влияния накопленной погрешности изготовления зубчатых колес с помош.ью усреднения.
Цель изобретения - повышение точности датчика угла поворота вала.
Поставленная цель достигается тем, что в датчик угла поворота вала, содержащий два кольцевых магнитопровода, установленные соосно и разделенные зазором, первый из кольцевых магнитопроводов содержит равномерно расположенные по окружности зубцы, обращенные в сторону зазора, кольцевой постоянный магнит, магниточувствительный элемент, введены дополнительные магниточувствительные элементы, кольцевые магнитопроводы выполнены П-образными и установлены торцами друг к другу, на одном из торцов первого кольцевого магнитопровода установлен кольцевой постоянный магнит, а другой торец выполнен зубчатым, на одном торце второго кольцевого магнитопровода, сопряженном с зубчатым торцом первого кольцевого магнитопровода, установлены магниточувствительные элементы, которые объединены в группы, магниточувствительные элементы каждой из групп равномерно расположены по окружности, смещены относительно магниточувствительных элементов соседней группы на четверть зубцового деления-и соединены между собой последовательно, а магниточувствительные элементы выполнены в виде магниторезистивной матрицы, в которой магниторезисторы расположены на общей магнитомягкой подложке.
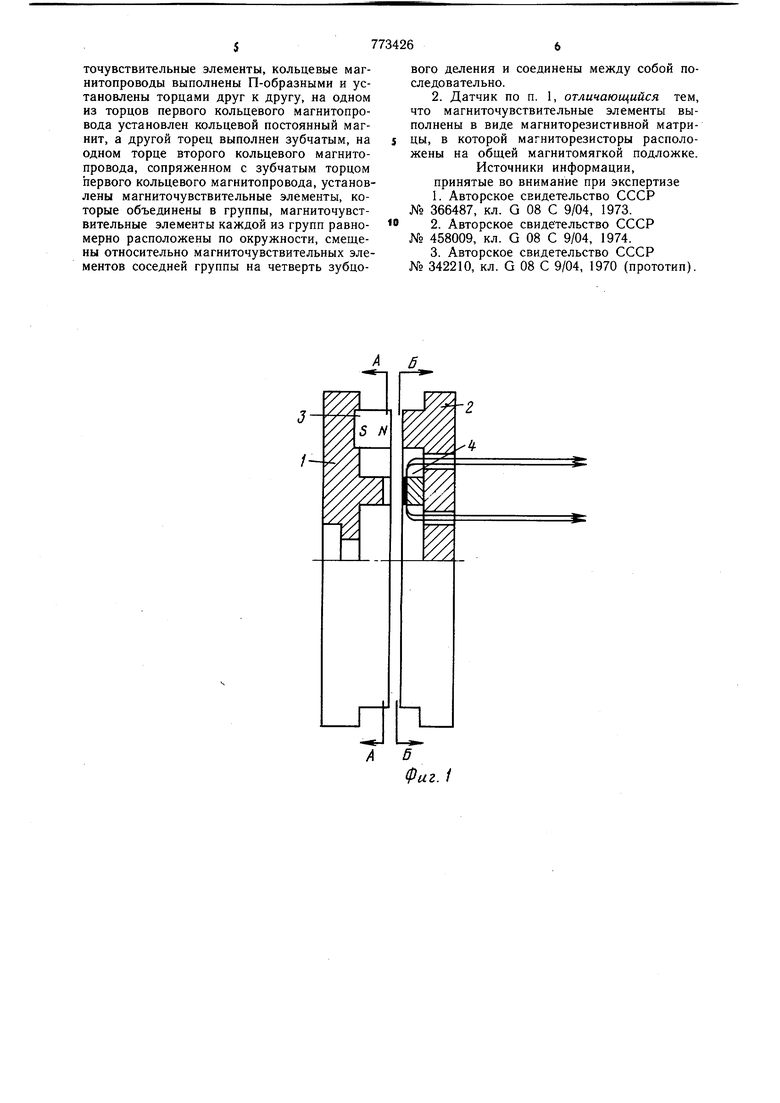
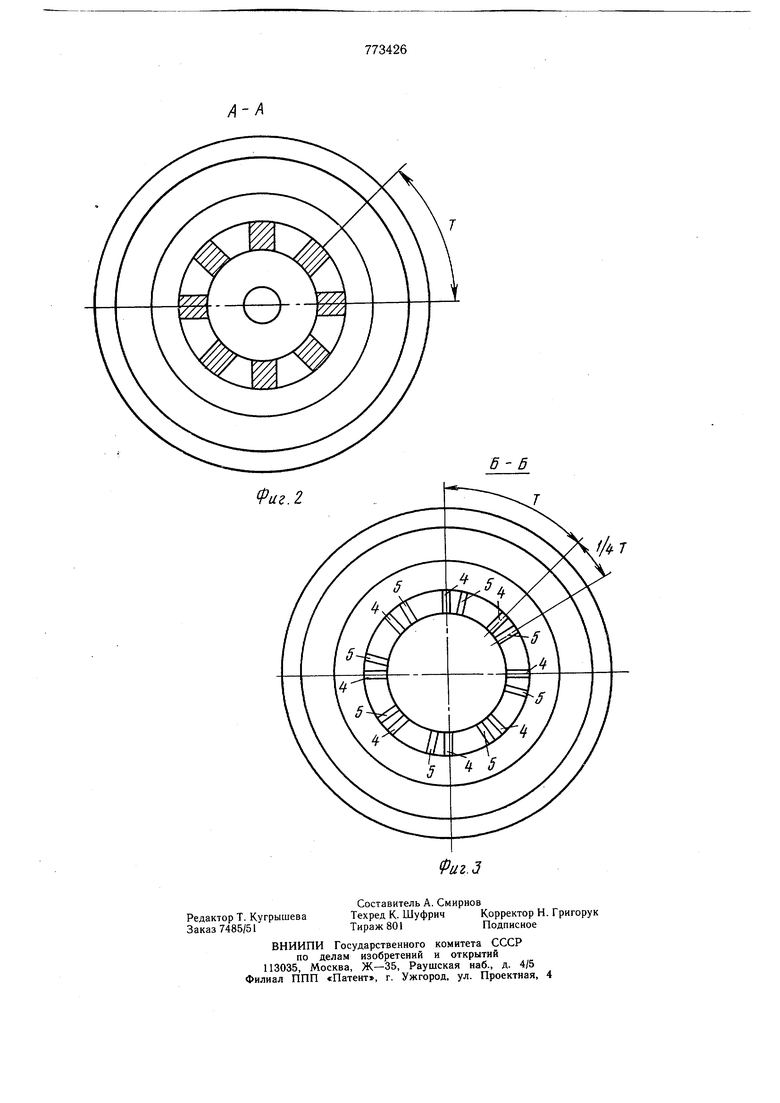
На фиг. 1, 2, 3 схематично представлены возможные варианты конструкции датчика.
Датчик угла поворота вала содержит два кольцевых магнитопровода 1 и 2, установленные соосно и разделенные зазором. Кольцевые магнитопроводы 1 и 2 выполнены П-образными и установлены торцами друг к другу, на одном из торцов магнитопровода 1 установлен кольцевой постоянный магнит 3, а другой торец выполнен зубчатым, на одном торце магнитопровода 2, сопряженном с зубчатым торцом магнитопровода 1, установлены магниточувствительные элементы (магниторезисторы) 4 и 5, которые объединены в группы, магниточувствительные элементы каждой из групп равномерно расположены по окружности, смещены относительно магниточувствительных элементов соседней группы на четверть зубцового деления и соединены между собой последовательно.
Принцип действия датчика основан на использовании магниторезистивного эффекта, который заключается в увеличении сопротивления полупроводникового магниторезистивного элемента при внесении его в магнитное поле. Магнитное поле в датчике создается с помощью кольцевого постоянного магнита 3, при этом в рабочем воздушном зазоре, образованном зубцами магнитопровода 1 и магниточувствительными элементами 4 и 5, устанавливается определенная напряженность магнитного поля, зависящая от взаимного расположения зубцов магнитопровода 1 и элементов 4 и 5. При вращении магнитопроводов 1 и 2 относительно друг друга изменяется взаимное расположение зубцов магнитопровода 1 и элементов 4 и 5.
Период изменения напряженности магнитного поля для каждой из групп магниторезисторов 4 и 5 равен периоду Т расположения зубцов магнитопровода 1. При линейном изменении напряженности магнитного поля сопротивление каждого из магниторезисторов 4 и 5 изменяется практически линейно. JB исходном (условно-нулеюм) положении магниторезисторы 4 первой группы расположены против соответствующих зубцов магнитопровода 1, а магниторезисторы 5 второй группы - в промежутках
0 между зубцами. Через четверть периода Т расположение магниторезисторов 4 и 5 относительно зубцов изменяется на противоположное. Магнитомодуляционный датчик выдает информацию об угловых перемещениях в виде изменения сопротивления двух групп магниторезисторов 4 и 5. Причем, если первая группа магниторезисторов 4 изменяет свое суммарное сопротивление при взаимном вращении магнитопроводов 1 и 2 по синусоидальному закону, то вторая группа магниторезисторов 5 изменяет свое суммарное сопротивление по косинусоидальному закону. Участие в формировании выходных сигналов датчика двух групп магниточувствительных элементов, когда элементы каждой из групп равномерно расположены по окружности, смещены относительно элементов соседней группы на четверть зубцового деления и соединены между собой последовательно, позволяет значительно повысить точность измерения угла поворота,
так как в этом случае происходит усреднение различного рода технологических отклонений при изготовлении и юстировке датчика. В результате получается магнитомодуляционный синусно-косинусный датчик, простой в изготовлении и обладающий поJ вышенной точностью.
Формула изобретения
jjj 1. Датчик угла поворота вала, содержащий два кольцевых магнитопровода, установленные соосно и разделенные зазором, первый из кольцевых магнитопроводов содержит равномерно расположенные по окружности зубцы, обращенные в сторону зазора, кольцевой постоянный магнит, магниточувствительный элемент, отличающийся тем, что, с целью повышения точности датчика, в него введены дополнительные магниточувствительные элементы, кольцевые магнитопроводы выполнены П-образными и установлены торцами друг к другу, на одном нз торцов первого кольцевого магнитопровода установлен кольцевой постоянный магнит, а другой торец выполнен зубчатым, на одном торце второго кольцевого магнитопровода, сопряженном с зубчатым торцом первого кольцевого магнитопровода, установлены магниточувствительные элементы, которые объединены в группы, магниточувствительные элементы каждой из групп равномерно расположены по окружности, смещены относительно магниточувствительных элементов соседней группы на четверть зубцового деления и соединены между собой последовательно.
принятые во внимание при экспертизе
№ 342210, кл. G 08 С 9/04, 1970 (прототип).
А б
