1
Известен высокочастотный датчик угловых перемещений индукционного типа, включающий статор с двухфазной и однофазной обмотками и ротор.
Предлагаемый датчик отличается от известного тем, что двухфазная обмотка статора выполнена кольцевой, а ротор - в виде двух рядов чередующихся ферромагнитных и немагнитиых металлических секторов, тангенциально смещенных один относительно другого на 90 эл. град.
Это повышает точность датчика.
Кроме того, ряды секторов могут быть разделены поперечным металлическим экраном.
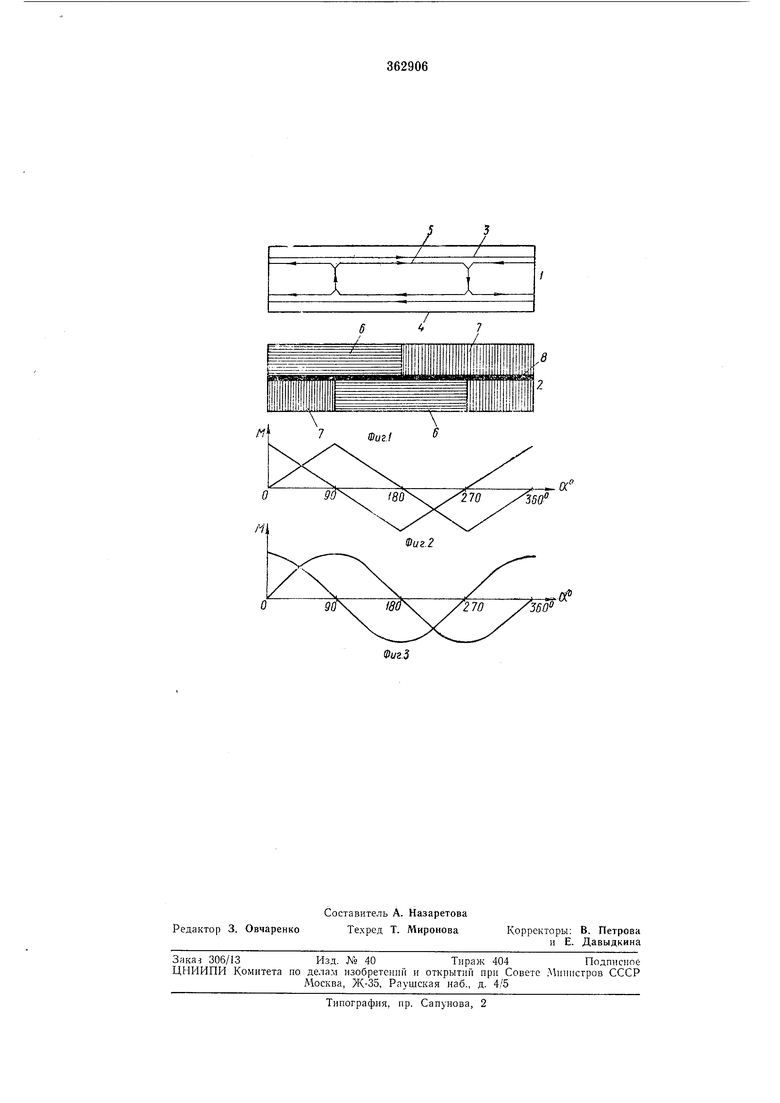
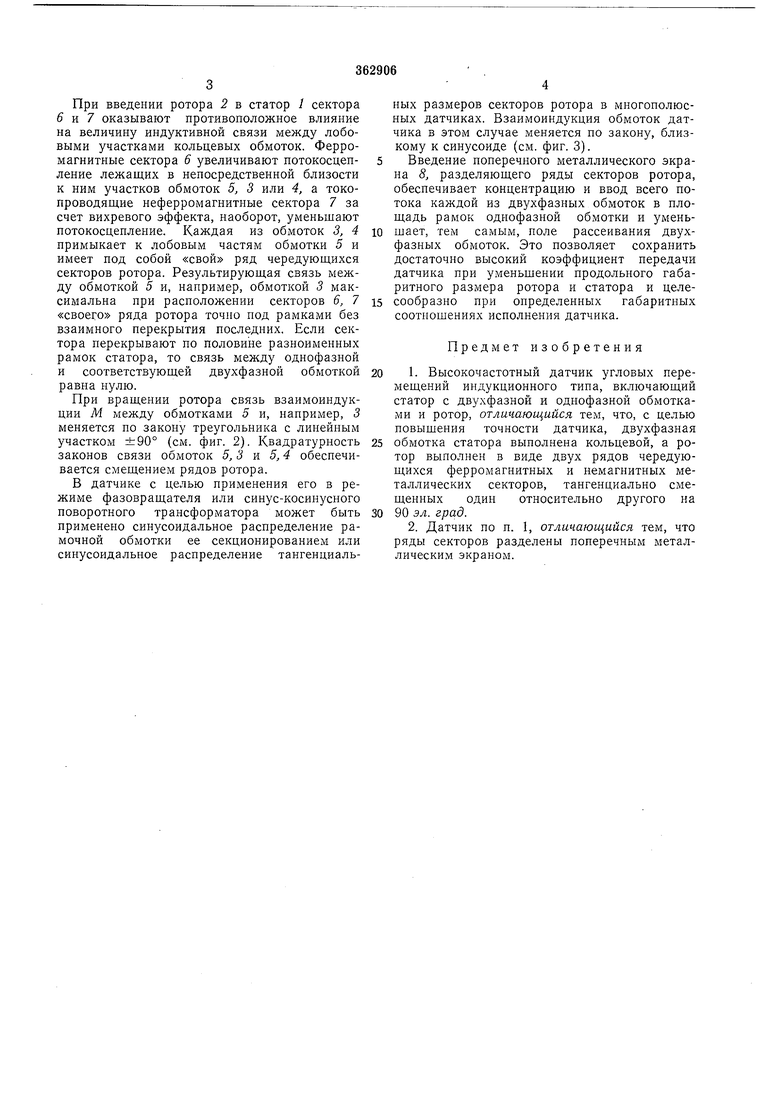
Па фиг. 1 изображены статор (способ его намотки) и ротор с двумя рядами секторов; на фиг. 2 - кривая изменения взаимоиндукции М между каледой из фаз двухфазной и однофазной обмотками в функции угла поворота ротора датчика (а); на фиг. 3 - то же, для случая синусоидального раснределения рамочной обмотки.
Датчик включает в себя цилиндрический статор /, выполненный из диэлектрического материала, и цилиндрический ротор 2, в данном случае выполненный из диэлектрического материала. Па статоре размещены кольцевые двухфазные обмотки 3 и 4 и однофазная рамочная обмотка 5, образующая полюса статора. Па поверхности ротора нанесены сектора 6 из ферромагнитного материала и сектора 7 из немагнитного токопроводящего материала.
На фиг. 1 и 2 показан датчик без электрической редукции измеряемого утла с числом пар полюсов, равным единице. При построении датчика с числом пар полюсов, равным двум и более, развертка статора и ротора состоит из соответствующего числа частей (см. фиг. 1). Соответственно этому во столько же раз сокращаются угловые (тангенцнальные) размеры рамок статора и секторов ротора.
Через лобовые участки обмотки 5 и прилегающие к ним участки кольцевых обмоток 3, 4 осуществляется индуктивная связь между двухфазной и однофазиой обмотками. Однофазная обмотка 5 содержит четное число одинаковых рамок, включенных попарно встречно, поэтому связь между любой из кольцевых и рамочной обмотками при извлечении ротора отсутствует. Пилиндрический ротор 2 несет на себе два ряда чередующихся секторов, тангенциаль но смещенных один относительно другого на половину сектора, т. е. на 90 эл. град. Сектора 6 выполнены из ферромагнитного материала, например листового пермаллоя, а сектора 7 - из токопроводящего немагнитного материала, например листового алюминия, меди и т. д.
При введении ротора 2 в статор / сектора б и 7 оказывают противоположное влияние на величину индуктивной связи между лобовыми участками кольцевых обмоток. Ферромагнитные сектора 6 увеличивают потокосцепление лежащих в непосредственной близости к ним участков обмоток 5, 3 или 4, а токопроводящие неферромагнитные сектора 7 за счет вихревого эффекта, наоборот, уменьшают потокосцепление. Каждая из обмоток 3, 4 примыкает к лобовым частям обмотки 5 и имеет под собой «свой ряд чередующихся секторов ротора. Результирующая связь между обмоткой 5 и, например, обмоткой 5 максимальна при расположении секторов 6, 7 «своего ряда ротора точно под рамками без взаимного перекрытия последних. Если сектора перекрывают по половине разноименных рамок статора, то связь между однофазной и соответствующей двухфазной обмоткой равна нулю.
При вращении ротора связь взаимоиндукции М между обмотками 5 и, например, 3 меняется но закону треугольника с линейным участком ±90° (см. фиг. 2). Квадратурность законов связи обмоток 5,3 и 5,4 обеспечивается смещением рядов ротора.
В датчике с целью применения его в режиме фазовращателя или синус-косинусного поворотного трансформатора может быть применено синусоидальное распределение рамочной обмотки ее секционированием или синусоидальное распределение тангенциальных размеров секторов ротора в многополюсных датчиках. Взаимоиндукция обмоток датчика в этом случае меняется по закону, близкому к синусоиде (см. фиг. 3). Введение поперечного металлического экрана 8, разделяющего ряды секторов ротора, обеспечивает концентрацию и ввод всего потока каждой из двухфазных обмоток в площадь рамок однофазной обмотки и уменьшает, тем самым, поле рассеивания двухфазных обмоток. Это позволяет сохранить достаточно высокий коэффициент нередачи датчика при уменьшении продольного габаритного размера ротора и статора и целесообразно при определенных габаритных соотношениях исполнения датчика.
Предмет изобретения
1. Высокочастотный датчик угловых перемещений индукционного типа, включающий статор с двухфазной и однофазной обмотками и ротор, отличающийся тем, что, с целью повышения точности датчика, двухфазная
обмотка статора выполнена кольцевой, а ротор выполнен в виде двух рядов чередующихся ферромагнитных и немагнитных металлических секторов, тангенциально смещенных один относительно другого на
90 эл. град.
2. Датчик по п. 1, отличающийся тем, что ряды секторов разделены поперечным металлическим экраном.
М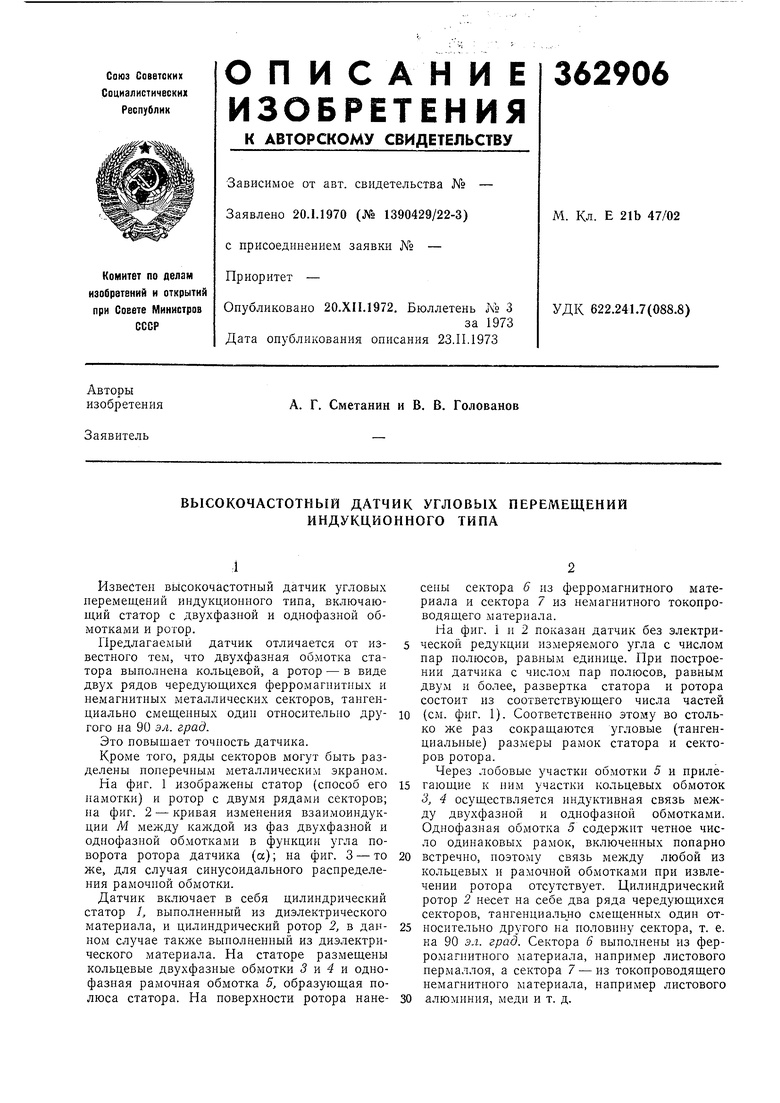
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОЧАСТОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU374648A1 |
| Датчик угловых перемещений | 1986 |
|
SU1395816A1 |
| Способ регулирования датчика угловых перемещений | 1989 |
|
SU1781672A1 |
| Датчик угла поворота вала | 1979 |
|
SU808850A1 |
| БЕСПАЗОВЫЙ СТАТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1997 |
|
RU2120172C1 |
| БЕСКОНТАКТНЫЙ КОМПРЕССИОННЫЙ ГЕНЕРАТОР | 1995 |
|
RU2089994C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2096898C1 |
| ЯКОРЬ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2076427C1 |
| Индуктосин | 1976 |
|
SU610256A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |