со
(Г ел
00
а
fpuSl
Изобретение относится к промысловой геофизике и может быть использовано для инклинометрии скважины (измерения азимута, зенитного угла) и измерения угла установки отклонителя при ориентировании на забое отклоняющей компоновки в процессе направленного бурения скважины.
Цель изобретения - повышение чувствительности датчика угловых перемеп е- ний.
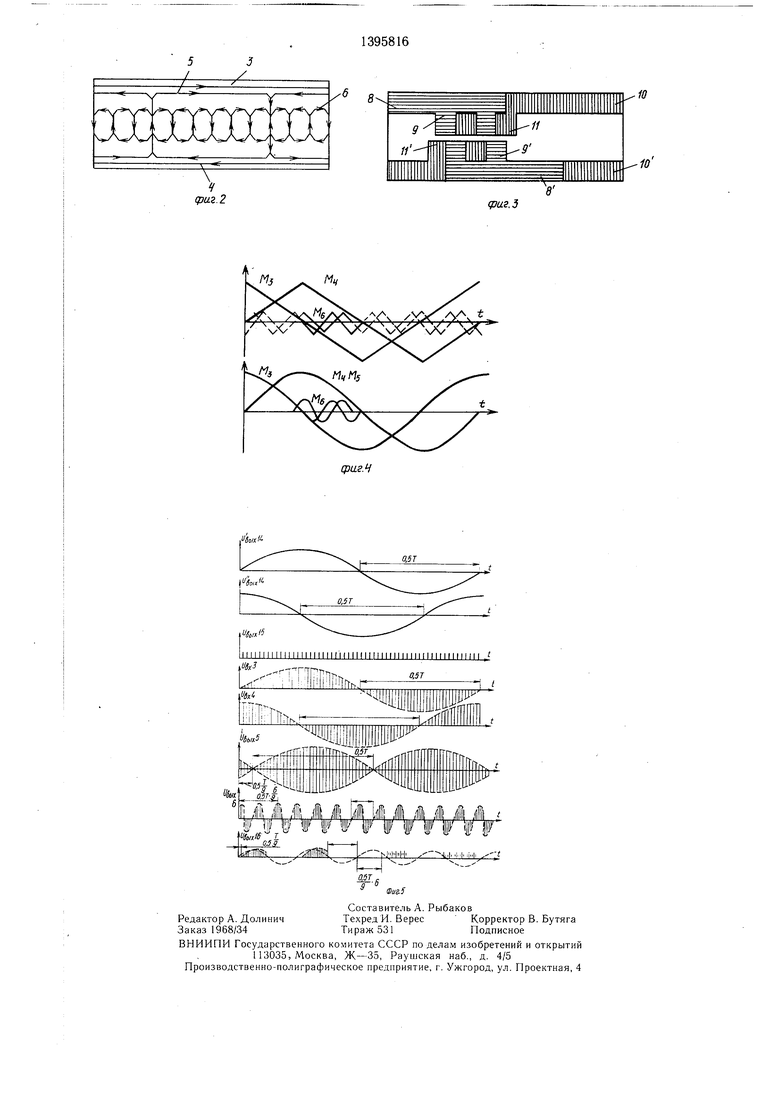
На фиг. 1 изображена структурная схема датчиков угловых перемещений в составе инклинометра; на фиг. 2 - схема обмоток датчика угловых перемещений; на фиг. 3 - развертка ротора датчика; на фиг. 4 - кривая измерения взаимоиндукции между каждой из фаз двухфазной и однофазной обмоток в функции угла поворота ротора датчика угловых перемещений; на фиг. 5 - временная диаграмма его работы.
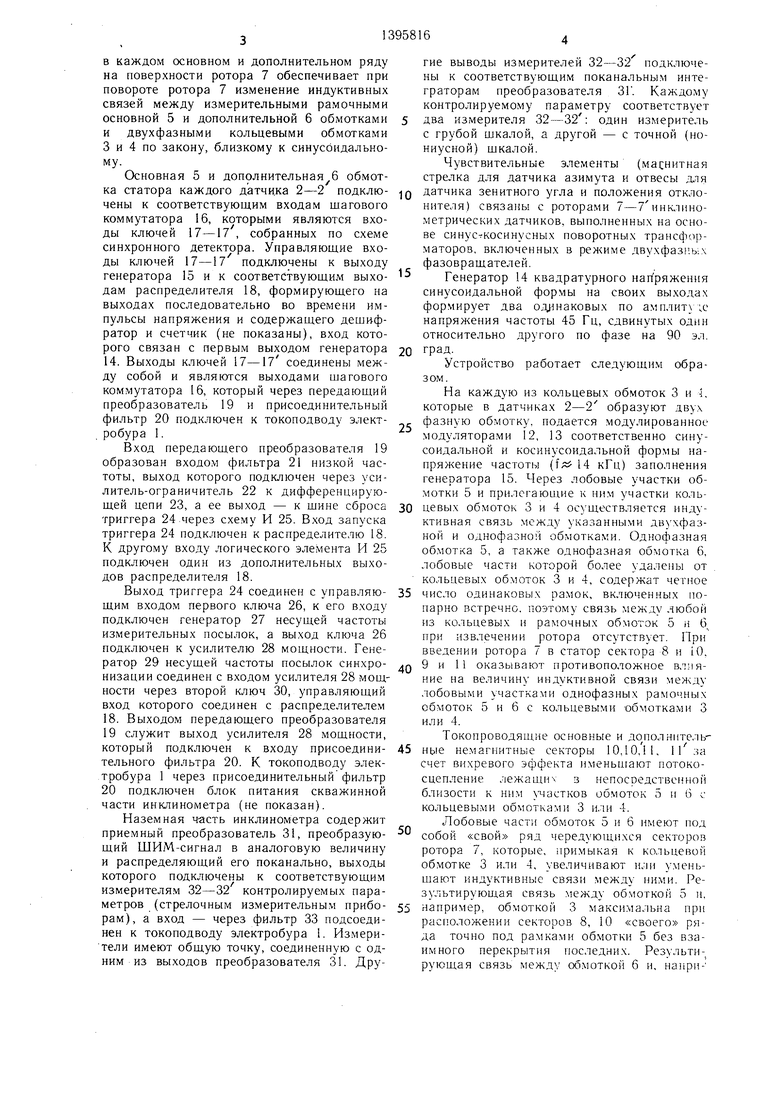
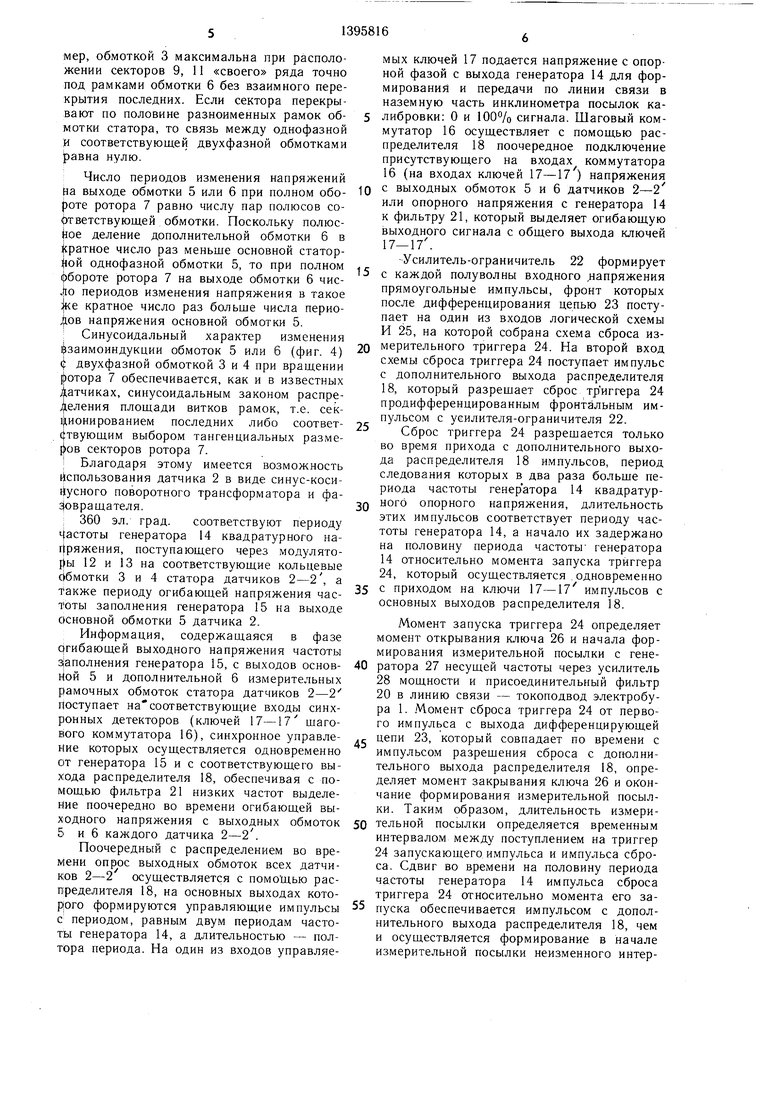
Над электробуром 1 в скважинной части инклинометра устанавливаются датчики 2-2 угловых перемещений, каждый из которых содержит диэлектрический статор с двухфазными кольцевыми обмотками 3 и 4 и однофазной основной рамочной обмоткой 5, а также однофазной дополнительной рамочной обмоткой 6. На бесконтактном роторе 7 каждого датчика размещены два ряда чередующихся основных секторов 8-8 и дополнительных секторов 9-9, а также основных секторов 10-Ш и дополнительных металлических секторов 11 - И , тангенциально смещенных один относительно другого на 90 эл. град. Причем между двумя рядами основных секторов 8-8 и 10-10 расположены и соответственно соединены с ними два дополнительных ряда чередующихся ферромагнитных секторов 9-9 и немагнитных секторов И - П ,.длина которых равна полюсному делению дополнительной статорной однофазной рамочной обмотки 6. Лобовые части обмотки 6 расположены в зоне дополнительных рядов секторов 9-9 и 11 -11 ротора, которые сдвинуты один относительно другого на половину полюсного деления дополнительной однофазной рамочной обмотки 6, полюсное деление которой в кратное число раз мень- ще основной однофазной рамочной обмотки 5.
Кольцевые обмотки 3 и 4 датчиков 2-2 соединены с выходами соответствующих модуляторов 12 и 13, основные входы которых подключены: у модулятора 12 - к первому, у модулятора 13 - ко второму выходам генератора 14 квадратурного напряжения синусоидальной формы. Модулирующие входы модуляторов 12 и 13 подключены к выходу генератора 15 частоты заполнения. Фаза выходного сигнала основной обмотки 5 статора датчика 2 соответствеут углу
0
5
0
5
0
5
0
5
0
5
поворота его ротора 7, а фаза выходного сигнала дополнительной обмотки 6 статора этого датчика в заданное целое число раз больше фазы сигнала основной обмотки 5, поскольку в это же число раз больше число полюсов дополнительной статорной рамочной обмотки 6 относительно основной рамочной обмотки 5. Два ряда дополнительных чередующихся ферромагнитных 9, 9 и немагнитных 11, 11 металлических секторов, которые соединены с соответствующими металлическими основными секторами 8-8 и 10-10, образуют единые с ними магнитопроводящие поверхности на роторе датчика. Дополнительные сектора 9-9 и 11 - 1Г достаточно удалены от лобовых частей основной обмотки 5 статора и не оказывают на нее заметного влияния. В зоне влияния дополнительных секторов 9-9 и 11 - 1Г на статоре между кольцевыми обмотками 3 и 4 и лобовыми частями основной рамочной обмотки 5 расположена дополнительная однофазная рамочная Обмотка 6, полюсное деление которой в кратное число раз меньще основной статорной однофазной рамочной обмотки 5.
Лобовые части дополнительной обмотки 6 достаточно удалены от рядов чередующихся ферромагнитных 8, 8 и немагнитных 10, 10 металлических основных секторов и расположены в зоне влияния только чередующихся ферромагнитных 9, 9, которые усиливают связь с кольцевыми обмотками 3,4, и немагнитных 11, 11, которые ослабляют эту связь, металлических дополнительных секторов, которые сдвинуты один относительно другого на половину деления дополнительной однофазной обмотки 6 и которые имеют длину, соответствующую полюсному делению этой дополнительной обмотки 6.
Для удобства изготовления статора датчика его пазы, в которых размещается основная 5 и дополнительная 6 обмотки, могут быть совмещены. При этом необходимо учитывать постоянное смещение .между началом отсчета основной и дополнительной шкал устройства. Кроме того, для повыще- ния технологичности конструкции число пар рамок однофазной измерительной обмотки статора, а также число чередующихся ферромагнитных и немагнитных металлических секторов в каждом ряду ротора может быть уменьшено и определяется из условия получения на выходе измерительной обмотки сигнала, величина которого достаточна для нормального функционирования датчика при любом положении его ротора в пределах заданного угла.
Чередование ферромагнитных (усиливающих связь с двухфазными кольцевыми обмотками 3 и 4) и немагнитных ( ослабляющих эту связь) металлических секторов
в каждом основном и дополнительном ряду на поверхности ротора 7 обеспечивает нри повороте ротора 7 изменение индуктивных связей между измерительными рамочными основной 5 и дополнительной 6 обмотками и двухфазными кольцевыми обмотками 3 и 4 по закону, близкому к синусоидальному.
Основная 5 и дополнительная б обмотка статора каждого датчика 2-2 подключены к соответствующим входам шагового коммутатора 16, которыми являются входы ключей 17-17 , собранных по схеме синхронного детектора. Управляющие входы ключей 17-17 подключены к выходу генератора 15 и к соответствующим выхо- дам распределителя 18, формирующего на выходах последовательно во времени импульсы напряжения и содержащего дещиф- ратор и счетчик (не показаны), вход которого связан с первым выходом генератора 14. Выходы ключей 17-17 соединены между собой и являются выходами шагового коммутатора 16, который через передающий преобразователь 19 и присоединительный фильтр 20 подключен к токоподводу электробура 1.
Вход передающего преобразователя 19 образован входом фильтра 21 низкой частоты, выход которого подключен через усилитель-ограничитель 22 к дифференцирующей цепи 23, а ее выход - к шине сброса триггера 24.через схему И 25. Вход запуска триггера 24 подключен к распределителю 18. К другому входу логического элемента И 25 подключен один из дополнительных выходов распределителя 18.
Выход триггера 24 соединен с управляющим входом первого ключа 26, к его входу подключен генератор 27 несущей частоты измерительных посылок, а выход ключа 26 подключен к усилителю 28 мощности. Генератор 29 несущей частоты посылок синхронизации соединен с входом усилителя 28 мощности через второй ключ 30, управляющий вход которого соединен с распределителем 18. Выходом передающего преобразователя
19служит выход усилителя 28 мощности, который подключен к входу присоединительного фильтра 20. К токоподводу электробура 1 через присоединительный фильтр
20подключен блок питания скважинной части инклинометра (не показан).
Наземная ч-асть инклинометра содержит приемный преобразователь 31, преобразующий ШИМ-сигнал в аналоговую величину и распределяющий его поканально, выходы которого подключены к соответствующим измерителям 32-32 контролируемых параметров (стрелочным измерительным нрибо- рам), а вход - через фильтр 33 подсоединен к токоподводу электробура 1. Измери- тели имеют общую точку, соединенную с одним из выходов преобразователя 31. Дру
0
5
5
0
5
0
5
0
гие выводы измерителей 32-32 подключены к соответствующим поканальным интеграторам преобразователя ЗГ. Каждому контролируемому параметру соответствует два измерителя 32-32 : один измеритель с грубой шкалой, а другой - с точной (но- ниусной) щкалой.
Чувствительные элементы (магнитная стрелка для датчика азимута и отвесы для датчика зенитного угла и положения откло- нителя) связаны с роторами 7-7 инклино- .метрических датчиков, выполненных на основе синус-косинусных поворотных трансформаторов, включенных в режиме двухфазных фазовращателей.
Генератор 14 квадратурного нап ряжения синусоидальной формы на своих выходах формирует два од 1наковых по амплитх ;е напряжения частоты 45 Гц, сдвинутых один относительно другого по фазе на 90 эл. град.
Устройство работает следующим образом.
На каждую из кольцевых обмоток 3 и 4, которые в датчиках 2-2 образуют двух фазную обмотку, подается модулированное модуляторами 12, 13 соответственно синусоидальной и косинусоидальной формы напряжение частоты (fp 14 кГц) заполнения генератора 15. Через лобовые участки обмотки 5 и прилегающие к ним участки кольцевых обмоток 3 и 4 осуществляется индуктивная связь между указанными дв) ной и однофазной обмотками. Однофазная об.мотка 5, а также однофазная обмотка 6, лобовые части которой более удалены от кольцевых обмоток 3 и 4, содержат четное число одинаковых рамок, включенных попарно встречно, поэтому связь между любой из кольцевых и рамочных обмоток 5 и 6 при извлечении ротора отсутствует. При введении ротора 7 в статор сектора 8 и 10. 9 и 11 оказывают противоположное влпя- ние на величину индуктивной связи между лобовыми участками однофазных рамочных обмоток 5 и 6 с кольцевыми обмотками 3 или 4.
Токопроводящие основные и до полнитель- ные немагнитные секторы 10,10,11, 11 за счет вихревого эффекта именьшают потоко- сцепление лежащи - з непосредственной близости к ни.м . частков обмоток 5 и 6 с кольцевыми обмотками 3 или 4.
Лобовые част обмоток 5 н 6 имеют под собой «свой ряд чередующихся секторов ротора 7, которые, примыкая к кольцевой обмотке 3 или 4, увеличивают нлн уменьшают индуктивные связи между ними. Ре- з} льтирующая связь между обмоткой 5 и. например, обмоткой 3 максимальна при расположении секторов 8, 10 «своего ряда точно под рамками обмотки 5 без взаимного перекрытия последни.х. Результирующая связь между обмоткой 6 и, например, обмоткой 3 максимальна при расположении секторов 9, 11 «своего ряда точно под рамками обмотки 6 без взаимного перекрытия последних. Если сектора перекрывают по половине разноименных рамок обмотки статора, то связь между однофазной И соответствующей двухфазной обмотками равна нулю.
Число периодов изменения напряжений На выходе обмотки 5 или 6 при полном обороте ротора 7 равно числу пар полюсов со- (ртветствующей обмотки. Поскольку полюс- jioe деление дополнительной обмотки 6 в ратное число раз меньше основной статор- ой однофазной обмотки 5, то при полном фбороте ротора 7 на выходе обмотки 6 чис- .iio периодов изменения напряжения в такое ке кратное число раз больше числа перио- ов напряжения основной обмотки 5. ; Синусоидальный характер изменения 1 заимоиндукции обмоток 5 или 6 (фиг. 4) двухфазной обмоткой 3 и 4 при врашении IjJOTOpa 7 обеспечивается, как и в известных j|iaT4nKax, синусоидальным законом распределения плошади витков рамок, т.е. сек- 1|1ионированием последних либо соответ- 4твуюшим выбором тангенциальных разме- секторов ротора 7. Благодаря этому имеется возможность использования датчика 2 в виде синус-коси- fiycHoro поворотного трансформатора и фазовращателя.
: 360 эл. град. соответствуют периоду jacTOTbi генератора 14 квадратурного на- г|ряжения, поступающего через модуляторы 12 и 13 на соответствуюшие кольцевые Обмотки 3 и 4 статора датчиков 2-2, а также периоду огибающей напряжения частоты заполнения генератора 15 на выходе основной обмотки 5 датчика 2.
Информация, содержащаяся в фазе ргибающей выходного напряжения частоты : аполнения генератора 15, с выходов основной 5 и дополнительной 6 измерительных рамочных обмоток статора датчиков 2-2 поступает на соответствующие входы синхронных детекторов (ключей 17-17 шагового коммутатора 16), синхронное управление которых осуществляется одновременно от генератора 15 и с соответствующего выхода распределителя 18, обеспечивая с помощью фильтра 21 низких частот выделение поочередно во времени огибающей выходного напряжения с выходных обмоток 5 и 6 каждого датчика 2-2.
Поочередный с распределением во времени опрос выходных обмоток всех датчиков 2-2 осуществляется с помоШью распределителя 18, на основных выходах которого формируются управляющие импульсы с периодом, равным двум периодам частоты генератора 14, а длительностью - полтора периода. На один из входов управляе
мых ключей 17 подается напряжение с опорной фазой с выхода генератора 14 для формирования и передачи по линии связи в наземную часть инклинометра посылок калибровки: О и 100% сигнала. Шаговый коммутатор 16 осуществляет с помощью распределителя 18 поочередное подключение присутствующего на входах коммутатора 16 (на входах ключей 17-17 ) напряжения
с выходных обмоток 5 и 6 датчиков 2-2 или опорного напряжения с генератора 14 к фильтру 21, который выделяет огибающую выходного сигнала с общего выхода ключей 17-17.
-Усилитель-ограничитель 22 формирует
с каждой полуволны входного напряжения прямоугольные импульсы, фронт которых после дифференцирования цепью 23 поступает на один из входов логической схемы И 25, на которой собрана схема сброса измерительного триггера 24. На второй вход схемы сброса триггера 24 поступает импульс с дополнительного выхода распределителя 18, который разрещает сброс тр иггера 24 продифференцированным фронтальным импульсом с усилителя-ограничителя 22.
Сброс триггера 24 разрещается только во время прихода с дополнительного выхода распределителя 18 импульсов, период следования которых в два раза больше периода частоты генератора 14 квадратурного опорного напряжения, длительность этих импульсов соответствует периоду частоты генератора 14, а начало их задержано на половину периода частоты генератора 14 относительно момента запуска триггера 24, который осуществляется . одновременно
с приходом на ключи 17-17 импульсов с основных выходов распределителя 18.
Момент запуска триггера 24 определяет момент открывания ключа 26 и начала формирования измерительной посылки с генератора 27 несущей частоты через усилитель 28 мощности и присоединительный фильтр 20 в линию связи - токоподвод электробура 1. Момент сброса триггера 24 от первого импульса с выхода дифференцирующей
цепи 23, который совпадает по времени с импульсом разрещения сброса с дополнительного выхода распределителя 18, определяет момент закрывания ключа 26 и окончание формирования измерительной посылки. Таким образом, длительность из.мерительной посылки определяется временным интервалом между поступлением на триггер 24 запускающего, импульса и импульса сброса. Сдвиг во времени на половину периода частоты генератора 14 импульса сброса триггера 24 относительно момента его запуска обеспечивается импульсом с дополнительного выхода распределителя 18, чем и осуществляется формирование в начале измерительной посылки неизменного интервала «подставки. Для формирования посылки синфазирования импульсом с одного из основных выходов распределителя 18 открывается ключ 30, который пропускает в течение времени, равного полтора периода частоты генератора 14, несущую частоту с генератора 29 через усилитель 28 и присоединительный фильтр 20 в линию связи - токоподвод электробура 1. Ключ 26 при этом закрыт. Несущие частоты генераторов 27 и 29 (28 кГц и 32 кГц) выбраны из условия обеспечения минимального затухания и максимальной помехоустойчивости прохождения сигнала по линии связи.
Напряжение частоты питания электробура 1 поступает через конденсатор присоединительного фильтра 20 в блок питания скважинной части инклинометра.
На дневной поверхности поступающ-ие по токоподводу электробура 1 ШИМ-посыл- ки несущих частот информации и синфазирования отделяются с помощью фильтра 33 от напряжения частоты питания электробура 1 и поступают на вход приемного преобразователя 31 наземной части инклинометра. В приемном преобразователе 13 осуществляется демодуляция и поканаль- ное разделение информационных и синфази- рующих посылок. Каждая из информационных ШИМ-посылок преобразуется в амп- литудно-модулированный сигнал и поступает на соответствующий канальный интегратор текущего значения контролируемого параметра. Среди этих посылок выделяется посылка, которая соответствует нулевому значению контролируемого параметра и преобразуется в амплитудно-модулированный сигнал, поступающий на канальный интегратор.
Балансное включение измерителей 32-32 между интегратором и соответствующим канальным интегратором обеспечивает вычитание сигнала, соответствующего нулевому значению измеряемых параметров, из преобразованного в амплитудно-модулированный сигнал текущего значения каждого из контролируемых параметров, что позволяет исключить при измерении ощибки, возникающие из-за деформации измерительных ШИМ-посылок при передаче их по линии связи.
Индикация результатов измерения в процессе бурения азимута, зенитного угла и положения ofклoнитeля осуществляется на соответствующих измерителях 32-32 с основной и дополнительной шкалой. Например, для отсчета азимута или положения отклонителя используется основная щкала с пределами от О до 360°, а также дополнительная щкала с пределами от О до 60°, т.е. с пределами в 6 раз меньщими относительно основной щкалы. Это значит, что датчики азимута и положения отклони5
теля имеют дополнительную рамочную обмотку 6, фаза выходного сигнала которой в 6 раз больще фазы выходного сигнала основной рамочной обмотки 5. Если основная
относительная погрещность каждого измерительного канала устройства равна, например, ±2,5%, то абсолютная погрещность измерения по каналу с основной щкалой с пределами О-360° составляет ±9°, а по
0 каналу с дополнительной щкалой с пределами О-60° составляет ±1,5°. Отсчет результата измерения осуществляется по основной щкале и уточняется по дополнительной нониусной щкале с погрещностью ±1,5, чем и обеспечивается в рассматриваемом
примере повыщение в 6 раз точности измерения контролируемого параметра.
Применение в датчике 2 дополнительно введенных секторов 9-9 и 11 -11 ротора 7 и дополнительной обмотки статора 6
0 с указанной геометрией, взаимным расположением и связями этих дополнительных элементов между собой и основными секторами 8-8 и 10-10 и обмотками 3, 4 и 5 позволяет умножить в целое число раз фазу выходного сигнала, повысить чувствительность датчика 2 и осуществлять отсчет результата измерения как по основной, так и по более точной дополнительной нониусной щкале инклинометра, что обеспечивает повыщение точности измерения контролируемых
0 угловых величин: зенитного угла, азимута скважины и положения отклонителя в процессе наклонно-направленного бурения.
Формула изобретения
Датчик угловых перемещений, содержа5 щий диэлектрический статор с двухфазной кольцевой и однофазной рамочной обмотками, бесконтактный ротор, на котором размещены два ряда основных чередующихся ферромагнитных и немагнитных металлиQ ческих секторов, тангенциально смещенных относительно друг друга на 90°, отличающийся тем, что, с целью повышения чувствительности, он снабжен дополнительной ста- торной однофазной рамочной обмоткой и расположенными на роторе двумя рядами
5 дополнительных чередующихся ферромагнитных и немагнитных металлических секторов, которые установлены между рядами основных секторов и соответственно соединены с ними, причем длины дополнительных секторов равны полюсному делению допол0 нительной статорной однофазной рамочной обмотки, лобовые части которой расположены в зоне дополнительных рядов секторов ротора, которые сдвинуты относительно друг друга на половину полюсного деле5 ния дополнительной статорной однофазной рамочной обмотки, полюсное деление которой в кратное число раз меньше основной статорной однофазной рамочной обмотки.
Ч cpu.z.2
ЧРиг.З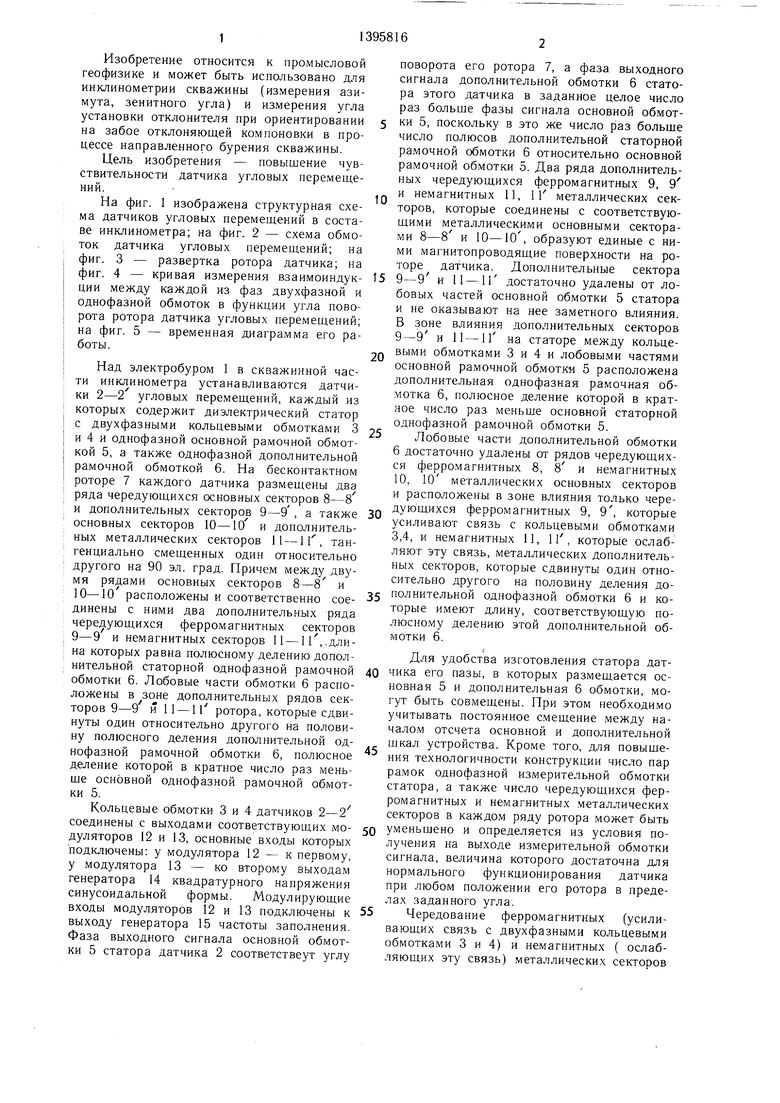
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОЧАСТОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU374648A1 |
| Способ регулирования датчика угловых перемещений | 1989 |
|
SU1781672A1 |
| ВЫСОКОЧАСТОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ИНДУКЦИОННОГО ТИПА | 1973 |
|
SU362906A1 |
| Устройство для определения пространственного положения скважины | 1982 |
|
SU1116147A1 |
| Датчик угла поворота вала | 1979 |
|
SU808850A1 |
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ИНДУКТОРНОГО ТИПА | 2003 |
|
RU2286642C2 |
| НИЗКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОЛЬЦЕВЫМ СТАТОРОМ | 2009 |
|
RU2417506C2 |
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
Изобретение относится к промысловой геофизике и м.б. использовано для инклино- метрии скважины. Цель изобретения - повышение чувствительности. Для этого датчик имеет дополнительную статорную однофазную рамочную обмотку 6 и расположенные на роторе 7 два ряда дополнительных чередующихся ферромагнитных и немагнитных металлических секторов. Они установлены между рядами основных секторов и соответственно соединены с ними. Длины ферромагнитных и немагнитных дополнительных секторов равны полюсному делению обмотки 6, лобовые части которой расположены в зоне дополнительных рядов ротора 7, которые сдвинуты относительно друг друга на половину полюсного деления обмотки 6. Полюсное деление последней в кратное число раз меньше основной ста- торной однофазной рамочной обмотки 5. Индикация результатов измерения в процессе бурения азимута, зенитного угла и положения отклонителя осуществляется на соответствующих измерителях с основной и дополнительной шкалой. Применение в датчике дополнительных ферромагнитных и немагнитных секторов, ротора 7 и обмотки 6 с указанной геометрией, взаимным расположением и .связями между собой и основными секторами позволяет умножить в целое число раз фазу выходного сигнала и осуществить отсчет по основной и дополнительной щкалам. 5 ил. i (Л
I V
s/ /
vV
| ВЫСОКОЧАСТОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ИНДУКЦИОННОГО ТИПА | 0 |
|
SU362906A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
