Изобретение относится к области транспортного машиностроения, в частности к подвескам транспортных средств.
Известны лневмогидравлические подвески, содержащие пневмогидравлические упругие элементы, датчик продольных колебанийкузова и управляемые сигналами датчика электрогидравлические клапаны, размещенные в трубопроводах, соединяющих полости противодавления лневмотидравлических упругих элементов, расположенных вдоль одного борта.
Однако такие подвески не обеспечивают достаточную плавность хода тра-нспортного средства при продольных колебаниях.
С целью устранения указанного недостатка в предлагаемом устройстве полости противодавления пневмогидравлических элементов, расположенных по одну сторону центра тяжести транспортного средства, соединены трубопроводами с размещенными в них электрогидравлическими клапанами в, груплу, а полости противодавления, упругихэлементов, расположенных с другой стороны центра тяжести, соединены трубопроводами с размещенными в них электрогидравлическими клапанами в другую группу..
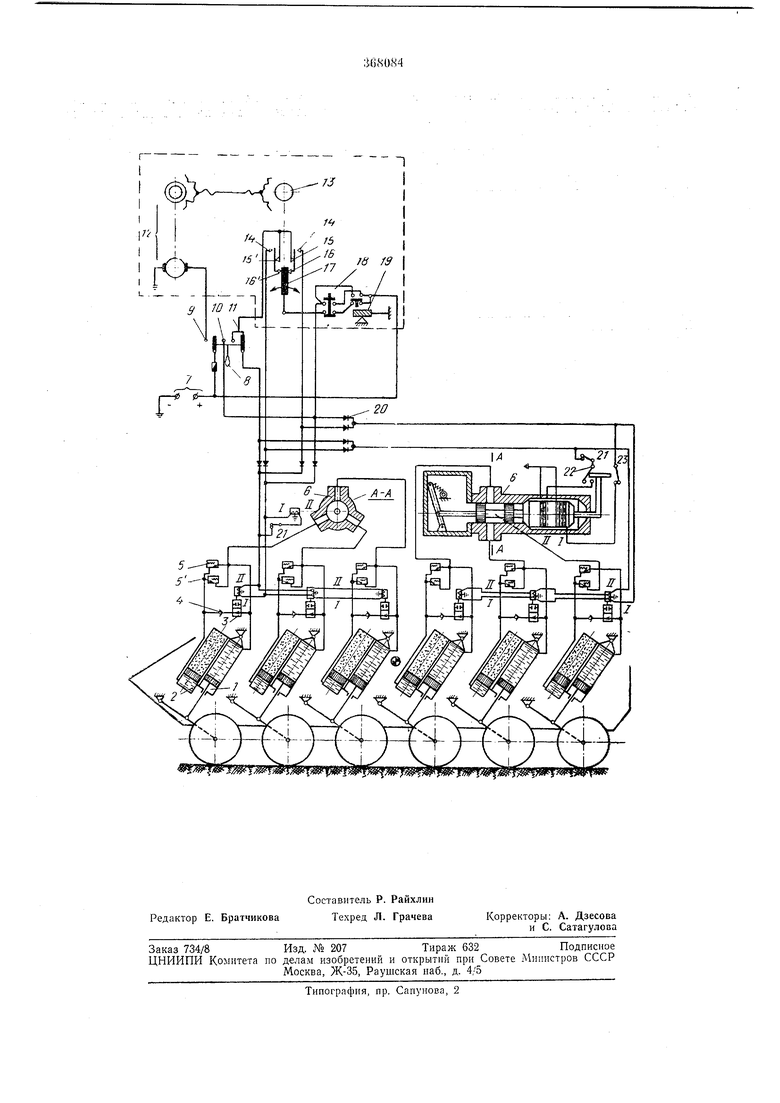
На чертеже показана пневмогидравлическая подвеска транспортного средства вместе с системой авторегулирования ее характеристик.
Основными элементами подвески являются пневмогидравлические элементы, каждый из которых состоит из двух цилиндров / и 2 со штоком, поршнем и разделителем, а также электрогидравлическийдвухпозиционный
двухходовой клапан 3 с самовыключением, перепускной клапан 4, гидравлические сопротивления 5 и 5 соответственно для прямого и обратного хода опорного катка. Кроме того, для каждой группы элементов, расположенных вдоль одного борта по разные стороны от центра тяжести, установлен клапан б, через который сообщаются друг с другом гидравличеокие полости упругих элементов. Клапан -3 и обратный клапан 4 соединены последовательно и установлены между цилиндрами 1 н 2 каждой рессоры.
Клапан 6 выполнен по типу двухпоз щио1 ного золотникового крана с электромагнитным самовыключающимся приводом. Все входы и выходы клапана выполнены в одной плоскости, перпендикулярной оси золотника и подсоединены к каждому упругому элементу группы в точке, расположенной между клапаном 3 и гидравлическим сопротивлением 5. .
В электрическую систему входят: источник
питания 7, ручной переключатель 8 на три
положения с контактами 9, 10, 11; датчик угловой скорости колебаний корпуса машины,
состоящий из преобразователя /2, гидротахояетра 13, контактов 14, 14, 15, 15. 16 и 16, пластины 17; кнопки неэлектрйческого реле 18; датчика вертикальных у-ск6рений 19; диодов 20; выключателя 21 в цепи катушек клапана 6; концевых выключателей 22 и 23. Пластина 17 .переключателя механическ связана с торсионным валиком гидротахометра и отклоняется от своего среднего положения в обе стороны в зависимости от знака угловой скорости корпуса пропорционально ее величине. При этом соответственно переключаются контакты 14, 15, 16 и ,14, 15, 16, расположенные оправа и слева от пластины. Эта же пластина электрически соединена с источником питания 7. Все упругие элементы одного борта сблокированы в две группы: носовую и кормовую. При прямом ходе катка жидкость перетекает из цилиндра 1 в цилиндр 2 через клапан 3, если он открыт, а при закрытом клапане 3 - через сопротивление 5, если при этом клапан 6 закрыт. При открытом клапане 6 и закрытом клапане 3 поток жидкости распределяется .между всеми объединенными в группу упругими элементами. При обратном ходе катка жидкость из цилиндра 2 вытесняется под давлением сжатого воздуха только через сопротивление 5, которое включено постоянно. Предлагаемая подвеска может работать в пяти различных режимах. Режим 1. Переключатель 8 установлен в правое положение, при котором датчики выключены. Ток от источника 7 поступает через контакт 10 и самовыключатели 23 в катушки I всех электроуправляемых клапанов 5 и 6, устанавливая их золотники в положение «закрыто, после чего размыкается самовыключатель 23. При этом все рессоры разобщены и включены со1противления 5 и 5 на каждом опорном катке. Режим 2. Переключатель 8 установлен в среднее положение, при котором датчики выключены. Выключатели 21 устанавливают в положение «выключено и нажимают кнопки 13 с целью установки клапанов 6 в закрытое положение. После возвращения кнопки 18 в исходное положение ток поступает-только в катушки II всех клапанов 3, устанавливая их золотники в положение «открыто, при котором все сопротивления 5 отключены (жидкость проходит из цилиндра / в цилиндр 2 через открытый клапа-н 3). Режим 3. Переключатель 8 установлен в среднее положение, при котором датчики выключены, выключатели 21 включают. Ток от источника 7 поступает через контакты датчика 19 и реле 5 (занимающих исходное положение) к контактам 16, 15, 11 и далее через ;амовыключатели 22 и катушки И всех клапаиав 3 -ц 6, устанавливая их золотники в -положение «открыто. При этом все упругие элементы сблокированы, а сопротивления 5 отключены. Режим 4. Переключатель 8 установлен в левое положение, при котором датчики включены. Выключатели 21 разомкнуты. Нажимают и oтпycкaюt кнопку 18 для закрытия клапанов 6, которые до этого могли быть открытыми. При исходном положении кноики 18 ток от источника 7 через контакты поступает в катушки II всех кла панов 3, устанавливая их ЗОЛОТНИКИ в положение «открыто. В процессе движения машины, например, по мелки.м неровностям пути, когда угловые колебания нез-начительны и угловая скорость не достигает заданных величин, все кладаны 3 остаются открытыми или (что то же) все гидравлические сопротивления |на лрямом ходу катков отключены. В этом случае снижается уровень ускорений тряски и потери мощности на трение. В других же случаях, когда угловая скорость колебаний корпуса достигает заданной величины, пластина 17 отклоняется, например, влево, размыкает контакты 16 и 15 и замыкает контакт 14. Теперь ток поступает в катушки I клапанов 3 на всех передних у,пругих элементах, и в катушки II клапанов 3 на всех задних упругих элементах. При это.м краны на передних элементах закрываются, а -на задних - открываются, что соответствует включению сопротивлений 5 на передних и выключению сопротивлений на задних. Если пластина 17 отклоняется вправо, размыкает контакты 16 :и 15 и замыкает контакт 14, ток поступает в катушки I клапанов 3 на всех задних упругих элементах и в катушки II клапанов 3 на всех передних. При этом сопротивление 5 включается на задних упругих элементах и выключается на передних. Режим 5. Переключатель 8 установлен в левое положение, при котором автомат включен. Выключатели 21 выключены. Если колебания корпуса незначительны, то малые отклонения пластины 17 от среднего положения не переключают контакты, и то« от источника питания поступает в катушки II всех клапанов 3 и 6. В этом случае все крайы открыты, т. е. все сопротивления 5 отключены, а упругие элементы носовой и кормовой групп сблокированы. При увеличении амплитуды колебаний на нос, когда угловая скорость корпуса достигает заданной величины, пластина 17 размыкает контакты 16 и 15 и включает контакт 14. При этом ток поступает в катушки I клапанов 5 и 6, связанных с носовыми упругими элементами и в катушки II клапанов 3 н в, соединенных с кормовыми, т. е. в одно и то же вре.мя носовые элементы разблокированы и включены их сопротивления 5, а кормовые сблокированы и их сопротивления 5 выключены. При угловом перемещении жорпуса иа корму, когда угловая скорость достигает заданной величины, пластина 17, отклоняясь вправо, размыкает контакты 16 и 15 и включает контакт 14. Ток поступает в катушки I клапанов 3 -ц 6 кормовых упругих элементов и в катушки И клапанов 3 -ц 6 носовых. При этом одновременно будут разблокированы кормовые упругие элементы и включены их сопротнвления 5, a носовые сблокированы и выключены их сопрютивления 5.
Таким образом, при одновременном автоматическом блокировании и разблокировании унругих элементов и регулировании гидравлических сопротивлений нроисходит интенсивное уменьшение возмущающего и увеличение демпф.ирующего действий. Это приводит к дальнейшему снижению уровня тряски, потерь мощности двигателя на трение в системе подрессоривания и увеличению скорости движения по подвеске с улучшенными параметрами плавности хода.
Подвеска, находясь в любом из режимов 2, 3, 4 и 5, может автоматически по сигналам инерционного датчика 19, переключаться на режим 1, т. е. ,в индивидуальную тодвеску с сопротивлением прямому и обратному ходу на каждом опорном катке. Такое переключение наступает тогда, когда вертикальные ускорения кОрнуса машины достигают заданной величины.
Кроме того, независимо от датчика 19, водитель может перевести подвеску из любого режима в режим 1 путем нажатия на кнопку 18 и удержания ее в этом состоянии. В обоих случаях ток от источника поступает в катушки I всех клапанов 5 и &. При этом краны закрываются, т. е. включаются все сопротивления 5 и все рессоры разблокировываются.
После возвращения датчика 19 или кнопки /о Б исходное положение подвеска переход 1т в тот рсжнм, в котором она пребывала ранее.
Выбор режима работы определяется водителем и устанавливается при помощи одного переключателя 8 и двух выключателей 21.
Предмет изобретения
П|невмотидра1влическая подвеска транспортнаго средства, содержащая пневмогидравлические упругие элементы, датчик продольных колебаний кузова и управляемые сигналами датчика электрогидравлические клапаны, размещенные в трубопроводах, соединяющих
полости противодавления пневмогидравлических упругих элементов, расположенных вдоль одного борта, отличающаяся тем, что, с целью улучшения плавности хода транспортного средства при продольных колебаииях, полости противодавления пневмогидравлических упругих элементов, располож:енных с одной стороны центра тяжести транспортного средства, соединены трубопроводами с размещенными в них упомянутыми электрогидравлическими клапанами в одну группу, а полости противодавления пневмогидравлических упругих элементов, распололсенных с другой стороны центра тяжести, соединены трубопроводами с размещенньп и в них электрогидравлическимл клаплнами в другую группу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| БОЛОТОХОДНАЯ ШАГАЮЩАЯ МАШИНА | 2023 |
|
RU2809311C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ С ОТКЛЮЧАЕМЫМИ ЦИЛИНДРАМИ | 1991 |
|
RU2044148C1 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
| Автоматическая система управления силовой установкой | 1983 |
|
SU1149044A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМ ПЛУГОМ | 2002 |
|
RU2227968C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПНЕВМО-ТОРСИОННОЙ ПОДВЕСКИ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2537928C1 |
| Устройство управления высотой выгрузного транспортера уборочной машины | 1982 |
|
SU1053775A1 |
| Система управления циклами подачи сыпучих материалов в вакууматор | 1987 |
|
SU1452845A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |