Изобретение относится к области транспортного машиностроения и может быть использовано в конструкциях транспортных гусеничных машин, в т.ч. военного назначения.
Известна конструкция торсионной неуправляемой подвески (Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации Э675-СБ3, часть 2, г. Курган). Подвеска БМП-2 отличается конструктивной простотой и высокой надежностью в эксплуатации. Недостатком подвески является невозможность регулирования характеристики подрессоривания. Это не позволяет адаптировать подвеску к меняющимся дорожным условиям эксплуатации, в т.ч. увеличивать клиренс машины при движении по глубокой колее, блокировать подвеску при установке на машину специального оборудования, обеспечивать клиренс при увеличении подрессоренного веса машины от установки дополнительного оборудования, регулировать жесткость подвески для обеспечения необходимого уровня плавности хода и т.д. Подвеска БМП-2 включает торсионы в качестве упругого элемента и телескопические гидроамортизаторы, закрепленные на бортах машины и шарнирно соединенные с балансирами опорных катков.
Новая пневмо-торсионная подвеска (а.с. №180669, заявка №3033235 от 11.01.1982 г.) обеспечивает замену обычных телескопических гидроамортизаторов гидропневматическими устройствами (далее - рессорами), при этом торсионы (как основные элементы подрессоривания) сохраняются. Основное преимущество новой подвески заключается в более прогрессивной характеристике подрессоривания, которая обеспечивает лучшие условия передвижения по пересеченной местности, чем существующая торсионная подвеска. Новая подвеска дает широкие возможности усовершенствования ходовой части в процессе модернизации машины.
Пневмо-торсионная подвеска по а.с. №180669 наиболее близка по технической сущности к заявляемому техническому решению и выбрана в качестве прототипа.
Целью изобретения является расширение функциональных возможностей торсионных подвесок с гидравлическими амортизаторами путем усовершенствования системы управления пневмо-торсионной подвески. Поставленная цель достигается тем, что система управления содержит позиционный переключатель, соединенный магистралями с источником сжатого воздуха и с гидропневматическими рессорами. При этом магистрали к рессорам выполнены с редукционными клапанами с различным уровнем преобразования управляющего давления. Воздушные полости рессор соединены с атмосферой магистралью, содержащей дроссель и регистратор давления. Полости противодавления рессор соединены магистралями с гидравлическими полостями высокого давления пневмогидравлических преобразователей давления. Воздушные полости преобразователей соединены с источником сжатого воздуха магистралями, содержащими запорный вентиль связи с атмосферой.
Применение предлагаемого технического решения в конструкциях подвесок транспортных гусеничных машин позволяет реализовать следующие функциональные возможности:
- увеличивать дорожный просвет (клиренс) машины при движении по глубокой колее;
- восстанавливать клиренс при увеличении подрессоренного веса машины от установки дополнительного оборудования;
- выполнять блокирование подвески при необходимости;
- обеспечивать режим «мягкой подвески» при движении по мелким частым неровностям для уменьшения ускорения тряски;
- устанавливать оптимальную жесткость подвески при движении по наезженной дороге «гармонического профиля» для снижения уровня ускорений при колебаниях подрессоренного корпуса машины.
Реализация отмеченных функциональных качеств новой подвески дает существенные эксплуатационные преимущества по сравнению с неуправляемой торсионной подвеской с гидравлическими амортизаторами.
Сопоставительный анализ с прототипом показывает, что заявленная система управления пневмо-торсионной подвески отличается тем, что снабжена позиционным переключателем, соединенным магистралями с источником сжатого воздуха и с гидропневматическими рессорами, при этом магистрали к рессорам выполнены с редукционными клапанами с различным уровнем преобразования управляющего давления, воздушные полости рессор соединены с атмосферой магистралью, содержащей дроссель и регистратор давления, а полости противодавления рессор соединены магистралями с гидравлическими полостями высокого давления в пневмогидравлических преобразователях давления, воздушные полости преобразователей соединены с источником сжатого воздуха магистралями, содержащими запорный вентиль связи с атмосферой.
Сравнение с другими аналогами не позволяет выявить в них признаки, отличающие заявленное техническое решение от прототипа и дающее указанный выше технический результат.
Изобретение поясняется чертежом, где показана на фиг.1 принципиальная схема системы управления пневмо-торсионной подвески гусеничной машины.
Источник сжатого воздуха 1 (штатный компрессор на машине) соединен с баллоном 2 (накопителем сжатого воздуха) и с позиционным переключателем 3, выполненным с фиксатором включенного положения. Магистрали воздушные 4 содержат редукторы давления 5 с различным уровнем преобразования управляющего давления, в т.ч. 35 ати, 70 ати, 14 ати. Эти магистрали связаны с рессорами 6, неподвижно закрепленными на бортах машины 7 и соединенными шарнирно с рычагами 8, которые закреплены неподвижно на установочных осях балансиров 9. В центральном отверстии балансиров неподвижно закреплены головки торсионов 10, закрепленных другими концами во втулках неподвижных опор балансиров 11. Магистраль 12 соединяет с атмосферой клапан блокировки, установленный в центральной перегородке рессоры (на чертеже не показан), при этом магистраль снабжена регистратором давления 13 и дросселем 14. Магистрали 15 соединяют гидравлические полости преобразователей давления 16 с полостями противодавления рессор 6. Воздушная магистраль 17 связывает воздушные полости преобразователей давления 16 с атмосферой и содержит запорный вентиль 18.
Работа устройства.
При включении позиции I в переключателе 3 сжатый воздух из баллона 2 поступает по магистрали 4 в воздушные полости рессор 6. Величина давления определяется из условия: примерно половина нагрузки подрессоривания опорного катка в статике обеспечивается давлением в воздушной камере рессоры. Другая половина статической нагрузки, действующей на опорный каток, обеспечивается торсионами 10, выполненными с уменьшенными диаметром и длиной, по сравнению с моноторсионной подвеской. Отмеченное давление воздуха (примерно 35 ати) обеспечивает основной режим подрессоривания опорных катков при движении машины в различных дорожных условиях. При движении по грунтовой дороге с глубокой колеей включается позиция II переключателя 3. В этом случае сжатый воздух при повышенном давлении, определяемом соответствующим редуктором давления 5, подается в воздушные полости рессор 6. Трасса к позиции I в позиционном переключателе 3 в этом случае перекрыта. При подаче повышенного давления (примерно 70 ати) происходит увеличение клиренса машины в пределах статического хода опорных катков (примерно на 100 мм). При движении машины по мелким частым неровностям для уменьшения ускорений тряски включается позиция IV переключателя 3. В этом случае воздушные полости рессор 6 соединяются с атмосферой, а опорные катки переходят в режим полностью торсионного подрессоривания. Уменьшение давления до 0 регистрируется посредством указателя 13, дроссель 14 обеспечивает плавное уменьшение давления в камерах рессор. При необходимости блокировки подвески включается позиция III переключателя 3. Воздух через редуктор 5 под пониженным давлением (примерно 14 ати) подается к клапанам блокировки рессор 6 (на чертеже не показаны). Клапаны под действием сжатого воздуха перекрывают жеклерные отверстия в межпоршневых перегородках рессор 6, обеспечивая режим блокировки подвески. Для разблокировки подвески включается позиция переключателя 3. Для выполнения ремонтных работ ходовой части целесообразно устанавливать корпус машины на подставки, а опорные катки фиксировать посредством балансиров 9 на упорах корпуса машины (на чертеже не показаны). В этом случае предварительно включается позиция IV переключателя 3, воздух из полости рессор 6 уходит в атмосферу. Корпус машины получает осадку, обеспечивая уменьшенный клиренс, соответствующий торсионному подрессориванию опорных катков. При дальнейшем включении позиции V переключателя 3 сжатый воздух по магистрали 17 поступает в воздушную полость преобразователей давления 16 (примерно под давлением 100 ати). Рабочая жидкость под высоким давлением (примерно 390 ати) поступает из гидравлической полости преобразователей 16 в гидравлические полости противодавления в рессорах 6, установленных на правом и левом бортах машины, при этом происходит закрутка торсионов на дополнительный к статическому угол до посадки балансиров 9 на упоры корпуса машины. Для возвращения опорных катков в подрессоренное положение позиционный переключатель 3 устанавливается в нейтральное положение (как показано на фиг.1), когда все магистрали перекрыты. При открытии вентиля 18 сжатый воздух из преобразователя давления 16 уходит в атмосферу, а рабочая жидкость из рессор 6 под давлением от закрученных торсионов 10 возвращается в гидравлические полости преобразователей 16. После этого обеспечивается рабочий режим подрессоривания, как изложено выше.
Применение предлагаемого технического решения в конструкции транспортных гусеничных машин позволяет реализовать существенные преимущества, по сравнению с известной торсионной подвеской с телескопическими гидроамортизаторами: сочетание надежности торсионной подвески с функциональными возможностями гидропневматической. Применение в конструкции пневмо-торсионной подвески торсионов с уменьшенным диаметром и рабочей длиной, по сравнению с моноторсионной подвеской, позволяет реализовать уменьшение суммарного веса торсионов для установки дополнительных пневмогидравлических рессор (на все опорные катки). Увеличение демпферной мощности подвески опорных катков ведет к повышению качества подрессоривания и быстроходности машины при движении в различных дорожных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ГИДРОПНЕВМАТИЧЕСКОЙ РЕССОРЫ | 2013 |
|
RU2537927C1 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ ГУСЕНИЦ | 2014 |
|
RU2547318C1 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1999 |
|
RU2169337C2 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2004 |
|
RU2279371C2 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU368084A1 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |
| РАЗВЕДЫВАТЕЛЬНАЯ ХИМИЧЕСКАЯ МАШИНА | 2007 |
|
RU2369826C2 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| СПОСОБ И СИСТЕМА СТАБИЛИЗАЦИИ КОРПУСА ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2501668C1 |
| БРОНЕТРАНСПОРТЕР | 2007 |
|
RU2369825C2 |
Изобретение относится к области транспортного машиностроения, а именно к системе управления пневмо-торсионной подвески гусеничной машины, и может быть использовано в конструкциях транспортных гусеничных машин, в том числе военного назначения. Система включает торсионы и пневмогидравлические рессоры опорных катков, а также систему их управления. Система управления снабжена позиционным переключателем, соединенным магистралями с источником сжатого воздуха и с пневмогидравлическими рессорами. Магистрали к рессорам выполнены с редукционными клапанами с различным уровнем преобразования управляющего давления. Воздушные полости рессор соединены с атмосферой магистралью, содержащей дроссель и регистратор давления. Полости противодавления рессор соединены магистралями с гидравлическими полостями высокого давления пневмогидравлических преобразователей давления. Воздушные полости преобразователей соединены с источником сжатого воздуха магистралью, содержащей запорный вентиль связи с атмосферой. Достигается увеличение клиренса и повышение плавности хода. 1 ил.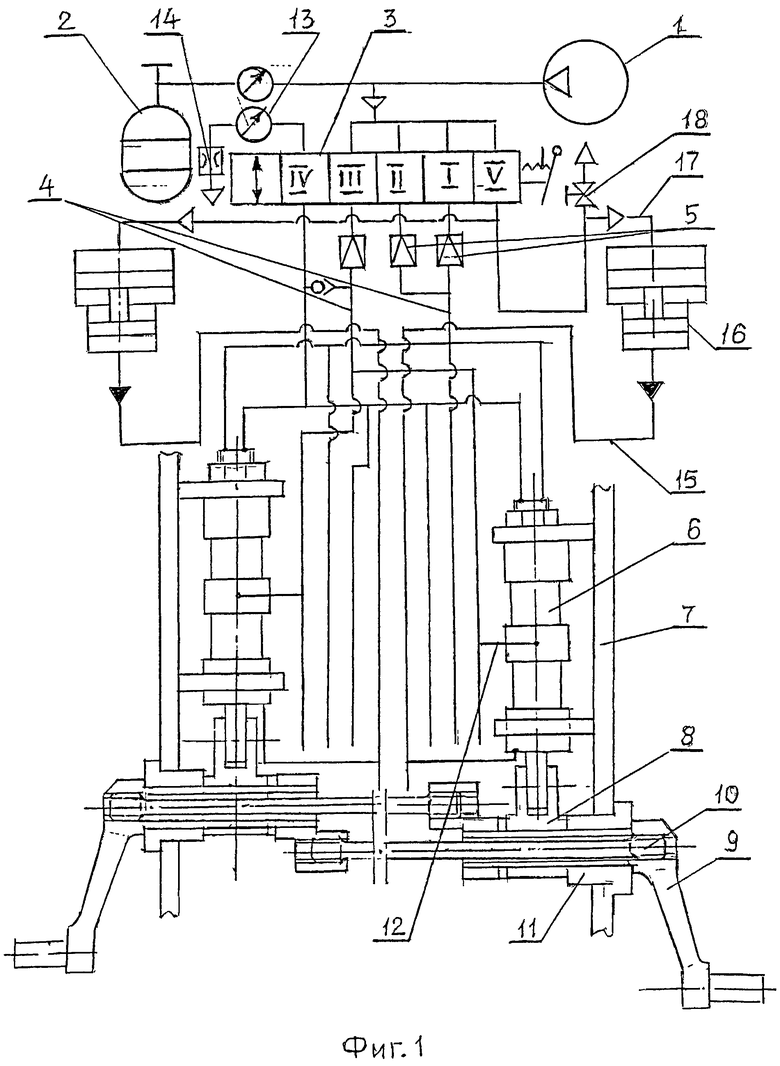
Система управления пневмо-торсионной подвески гусеничной машины, включающая торсионы и пневмогидравлические рессоры опорных катков, а также систему их управления, отличающаяся тем, что система управления снабжена позиционным переключателем, соединенным магистралями с источником сжатого воздуха и с пневмогидравлическими рессорами, при этом магистрали к рессорам выполнены с редукционными клапанами с различным уровнем преобразования управляющего давления, воздушные полости рессор соединены с атмосферой магистралью, содержащей дроссель и регистратор давления, а полости противодавления рессор соединены магистралями с гидравлическими полостями высокого давления пневмогидравлических преобразователей давления, воздушные полости преобразователей соединены с источником сжатого воздуха магистралью, содержащей запорный вентиль связи с атмосферой.
| ПНЕВМОГИДРАВЛИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 0 |
|
SU368084A1 |
| US 6951260 B1, 04.10.2005 | |||
| Система автоматического регулирования положения кузова транспортного средства на пневматических рессорах | 1972 |
|
SU464462A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ПТИЦА С КАПУСТОЙ И ПАРОВЫМ СОУСОМ" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ | 2005 |
|
RU2303912C1 |
| Устройство для сопряжения двух ЭВМ | 1987 |
|
SU1543415A1 |

