(54) ХОБОТ КОВОЧНОГО МАНИПУЛЯТОРА


| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевая головка ковочного манипулятора | 1979 |
|
SU856640A1 |
| Механизм зажима клещей хобота ковочного манипулятора | 1978 |
|
SU759192A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Хобот ковочного манипулятора | 1978 |
|
SU795705A1 |
| Клешевой захват ковочного манипулятора | 1985 |
|
SU1465168A1 |
| Клещевой захват ковочного манипулятора | 1982 |
|
SU1034826A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU236207A1 |
| Привод вертикального перемещения хобота ковочного манипулятора | 1980 |
|
SU912390A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДВЕСКОЙ ХОБОТА КОВОЧНОГО МАНИПУЛЯТОРА | 1991 |
|
RU2015783C1 |

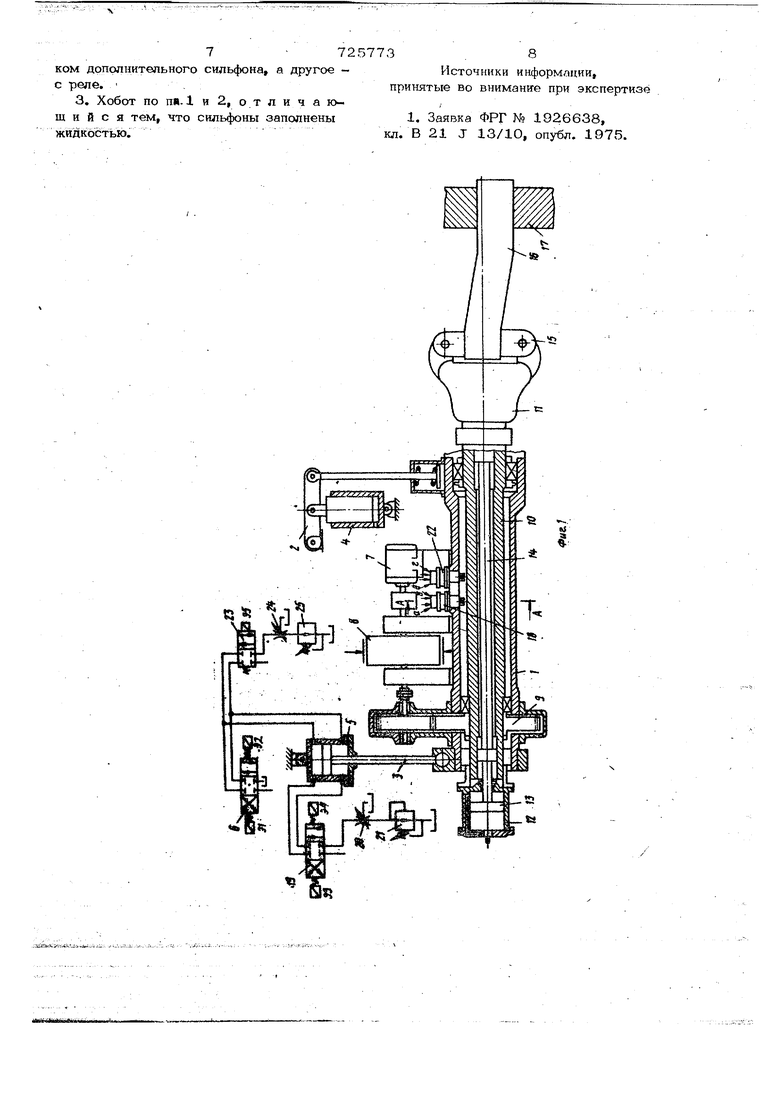
Изобретение относится к вспомогатедь ному оборудованию кузнечно-штамповочного производства,в частности к конструкциям ковочных манипуляторов., Известен хобот ковочного манипулятора, содержащий корпус, установленный в нем мундштук, связанньй с клещевой головкой, механизмы вращения и зажима .клещевой головки, а также переднюю и заднюю подвески корпуса хобота с силовыми цилиндрами подъема и выравнивания и электрогидравлическую систему управления силовыми цилиндрами Щ. Известный хобот ковочного манипу- лятора при правке поковок бойками пресса осуществляет установку и поддержку ее во время правки. Однако из.-за малых вьшравленных участков поковки бойками пресса требуется многократное повторение операции, что снижает производитель ность при ковке. Кроме того, при правке поковок возни кают перегрузки деталей хобота, что приводит к его поломкам. Цель изобретения - повьшение пронэвод;ительности работы и увеличение долговечности. С этой целью электрогидравлическая система управления снабжена узлами блокировки и настройки давления жидкости .в силовых цилиндрах выравнивания, каждый из которых содержит золотник с электромагнитами, дроссель, предохранительный клапан и датчик давления, установленный на корпусе хобота с возможностью взаимодействия с мундштуком и электрически связанный через реле с соответствующими ему электромагнитами. При этом датчик давления вьтолнён в виде связанных между собой магистралью основного и дополнительного силы}юнов, заполненных жидкостью, с соответствукуишми им (фланцами, ролика, контактирующего с мундштуком и установленного на шток связанном с фланцем основного сильфона, индивидуального штока,связанного с ({танцем дополнительного скпъфона, а также двуплечего рычага, одно плечо которого контактирует со, штоком дополнительного сильфона, а другое - с реле.. , На фиг. 1 показано устройство, общий вид; на фиг. S - разрез А-А фиг. JL Хобот ковочного манипулятбра содержит корпус 1, механизмы вращения и зажима клещевой головки, переднюю 2 и заднюю 3 подвески корпуса хобота с силовыми цилиндрами подъема 4 и выравнивания 5 электрбгидравлическую систему управления силовыми цилиндрами с узлами блокировки и настройки давленияв силовык цилиндрах выравнивания и трехпозиционный золотник 6 с электромагнитами Э1, Э2, служащий для Подачи жидксюти высокого давления в полосгги цилиндра 5 при подъеме и опускании хобота во время основных операций ковки Механизм вращения содержит электродвигатель 7, планетарный редуктор 8, жестко закрепленньй на корпусе 1 хобот зубчатую пару 9, мундштук 1О, расположенный внутри корпуса 1 хобота, связанного с клещевой головкой 11. Механизм зажима выполнен в виде цилиндра 12, закрепленного на койще мундштука 1О, поршня 13 со шток.ом 14 проходящего внутри мундштука 10 и шар нйрйо вязанного с зажимными губками 15 клещевой головки 11 и через пОковку 16 с бойками 17 пресса. Узел настройки содержит датчик давлё нийД8, трехпозиционный золотник 19 с электромагнитами ЭЗ Э4, дроссель 2О, предохранительный клапан 21, связанньй с цилиндрами выравнивания 5. -Узел бл бкйрбвки содержит датчик давления 22, двухпозиционный золотник 23, дроссель 24, предохранительный клапан 25, связан ный с цилиндрами вьфавнивания 5. Датчик давления 18, входящий в узел настройки, содержит ролик 26, контактирующий с мундштуком 10, штоки 27и 28, двухпозиционное реле 29 с контактами а и б в цепях электромагнитов 33-Э4, пружину ЗО, основной сильфон 31 и дополнительный сильфон 32 с фланцами 33 и 34 и корпусами 35 и 36, связанных между собой магистралью 37. При этом ролик 26 установлен на щтоке 27, связа ном с фланцем 33 основного сильфона 31 а индивидуальный шток 28 связан с флан цем 34 дополнительного сТшьфона 32 и :контактирует с одним плечом двуплечего рычага 38, второе плечо которого контак тирует с реле 29. Корпуса 35 и 36 сильфойов жестко закреплены на хоботе. а сами сильфоны связаны с корпусами с помощью фланцев. Датчик, давления 22, входящий в узел блокировки, выполнен идентично с датчиком давления 18, но имеет двухпозиционйое реле с контактами виг в цепях управления электромагнитами ЭЗ, Э4, Э5. Узел настройки предназначен для настройки определенного давления в цилиндрах выравнивания 5 в зависимости от усилия правки поковки 16, зажатой в клещевой головке 11 механизмом зажима и бойками 17 пресса с помощью датчика давления 18, служащего для измерения прогиба мундштука 10 и выработки сигнала с помощью двухпозиционно- го реле 29, входящего в датчик давления. Для управления электромагнитами ЭЗ и Э4 золотника 19, служащего для подклю чения к верхней полости цилиндров 5 жидкости высокого давления, а к нижней полости - магистрали, состоящей из предохранительного клапана 21 для настроили определенного противодавления в нижней полости цилиндров 5 и дросселя 2О, обеспечивающих перемещение хобота при правке с определенной скоростью. Узел блокировки предназначен для предохранения деталей хобота от поломок при превьш1ении максимального допустимого усилия правки с помощью датчика давления 22, служащего для измерения и выработки сигнала управления электромагнитами ЭЗ, Э4, Э5 золотников 19 и 23 при максимальном прогибе мундштука 10, При этом золотник 23 служит для , подачи жидкости высокого давления в нижнюю полость цилиндров выравнивания 5 и для соединения верхней полости цилиндров со сливом через дроссель 24 и предохранительный клап|ан 25, обеспечивающих плавный подъем хобота при перегрузке. В исходном положении перед правкой в датчике давления 18 контакты а в цепи электромагнита ЭЗ замкнуты, а б в цепи электромагнита Э4 разомкнуты. В датчике давления 22 контакты в в цепи электромагнита 35 разомкнуты, а г замкнуты. При этом в цепи контактов г находится катушка, которая воздействует на нормально открытые контактй в цепи электромагнитов ЭЗ и Э4. При нажатии Машинистом манипулятора кнопки (на чертеже не показана) в цепи электромагнита ЭЗ срабатывает золотник19 ижидкость высокого давления подается в верхнюю полойть цилиндров вырав1швания 5, Хобот перемещается вниз, и на поковку 16 будет действовать изги бающий момент, вызывающий- пластическую деформацию искривпенного участка, и поковка будет вьтравляться. Дрос- сель 20 с предохранительным клапаном 21, входящие в узел настройки, регулируют скорость перемещения хобота вниз и давление жидкости в нижней полости цилиндров 5, чтобы при отсутствии противодавления не могло произойти пйломок деталей хобота от силы тяжести хобота и силы давления жидкости на верхнюю поверхность порщней в цилиндрах 5, При превышении определенного допустимого прогиба мундштука 1О, определяемого силой, требуемой для правки поковки и настраиваемой с помощью предохранительного клапана 21, ролик 26 смещает с помощью штока 27 дно основного сильфона 31., В результате этого шток 28 перемещается и поворачивает рычаг 38 двухпозидио.нного реле 29, который размыкает конгтакт а в цепи электромаптата ЭЗ и замыкает контакты б в цепи электромагнита Э4. Благодаря этому в верхней полос ти цилиндров 5 сбрасывается давление и поковка с хоботом поднимаются. При сни жении нагрузки на детали хобота прогиб мундштука Ю уменьщйтся и контакты реяе 29 займут исходное положение, что приведет к отключению электромагнита Э4 и возврату золотника 19 в нейтральное положение. Для продолжения процес- са правки машинисту манипулятора необ ходимо вновь замкнут1: кнопку в депи электромагнита ЭЗ. Датчик давления 18 отрегулирован таким образом, что манипулятор может обеспечить определенное усилие правки, при котором детали хобота испытьгоают напряжения, допуст.имые при длительной эксплуатации устройства. Эта регулировка осуществляется винтом, наход5пцимся в корпусе прибора и воздействующего на пружину ЗО (см. фиг. 2). В случае неисправностей в датчике давления 18 или нарушений в работе схемы ут1равления золотником 19 происходит нагружение хобота, что вызьтает максимальный аварийный прогиб. мундшту ка и срабатьтание датчика давления 22 в узле блокировки, при этом контакты г размыкаются, катушка обесточивается и контакты в цепи электромаг 1итов ЭЗ, Э4 размыкаются, отключая золотник 19. Контакты в замь1ка отся, что приводит К срабатыванию Золотника 23 н подаче жидкости высокого давления в нижшото полость Цилиндров 5, Хобот поднимается прогиб мундштука 10 уменьшается, репе в датчике давления 22 отключает электромагнит 35, золотник 23 возвращается в нейтральное положение, и система готова к продолжению правки. Таким образом за счет введения узлов настройки н блокировки давшения жидкости в цилиндрах выравнявания с датчиками давления контролирующими прогиб мундштука, происходит автоматическое предохранение деталей хобота от перегрузки и одновременно позволяет производить правку поковок, зажатых бойками пресса, что исключает многократную правку и позво- ляет повьюить производительность при ковке. зобретения о р м у л а 1,Хобот ковочного манипулятора, содержащий корпус, установленный в нем мундштук, связанный с клещевой головкой механизмы вращения и зажима.клещевой головки, а также переднюю и зад1аою подве:;ки корпуса хобота с силоBbHvffl циливдраш подъема и выравнивания в электрогидравлическую систему управяенкя силовыми цилиндрами, отличающийся тем, что, с целью повышения производительности работы и увеличения долговечнсгсти, эдектрогидравлнческая система управления снабжена узлайи блокировки а настройки давления жидкости в силовых цилиндрах вьфавнивания, каждый из которых содержит золотник с электромагнитами, дроссель, предохранительный клапан и датчик давления, установленный на корпусе хобота с возможностью взаимодействия с мундштуком и электрически связанный через реле с соответствующими ему электромагнитами. 2.Хобот по п. 1, о г л и ч а ю щ и йс я тем,,что датчик давления вьшолнен в виде связанных между собой магистралью основного и дополнительного сильфонов с соответствующими им фланцами, ролика, контактирующего с мундштуком и установленного на штоке, связанном с фланцем, основного сильфона, индивидуального штока, связанного с фланцем дополнительного сильфона, а также двуплечего рычага, одно плечо которого контактирует со штоком дополнительного сильфона, а другое с реле.
Источники информации, принятые во внимание при экспертизе
а д
гз
-34
