1
Изобретение относится к области транспортных средств для перевозки длинномерных грузов, в частности лесоматериалов.
Известны транспортные средства, содержащие раму, несущую силовую установку и опирающуюся на несколько управляемых колес с Приводами, связанных с механизмо.м шагания, и грузозахватное устройство.
Однако они не о бладают необходимой проходимостью и маневренностью.
Цель изобретения - повысить проходимость и маиевренность транспортного средства.
Эта цель достигается
тем, ЧТО механизм транспортного средшагания предлагаемого ства выполнен в виде несущих колеса двуплечих рычагов, шарнирно сочлененных с укреплеЕнымй в направляющих рамы ползунами и шатунами шарнирных четырехзвенников, кривошипы которых соединены с приводными валами, связанными общим приводом с силовой установкой, выполненной в виде электрического генератора, -приводимого от автономного двигателя.
Кроме того, привод вращения колес выполнен в виде встроенного в колесо электродвигателя, причем статор его укреплен на двуплечем рычаге.
Для захвата груза грузозахватное устройство выполнено в ВИде поворотных клещей.
смонтированных на торцах рамы с возможностью вертикального возвратно-поступательного перемещения.
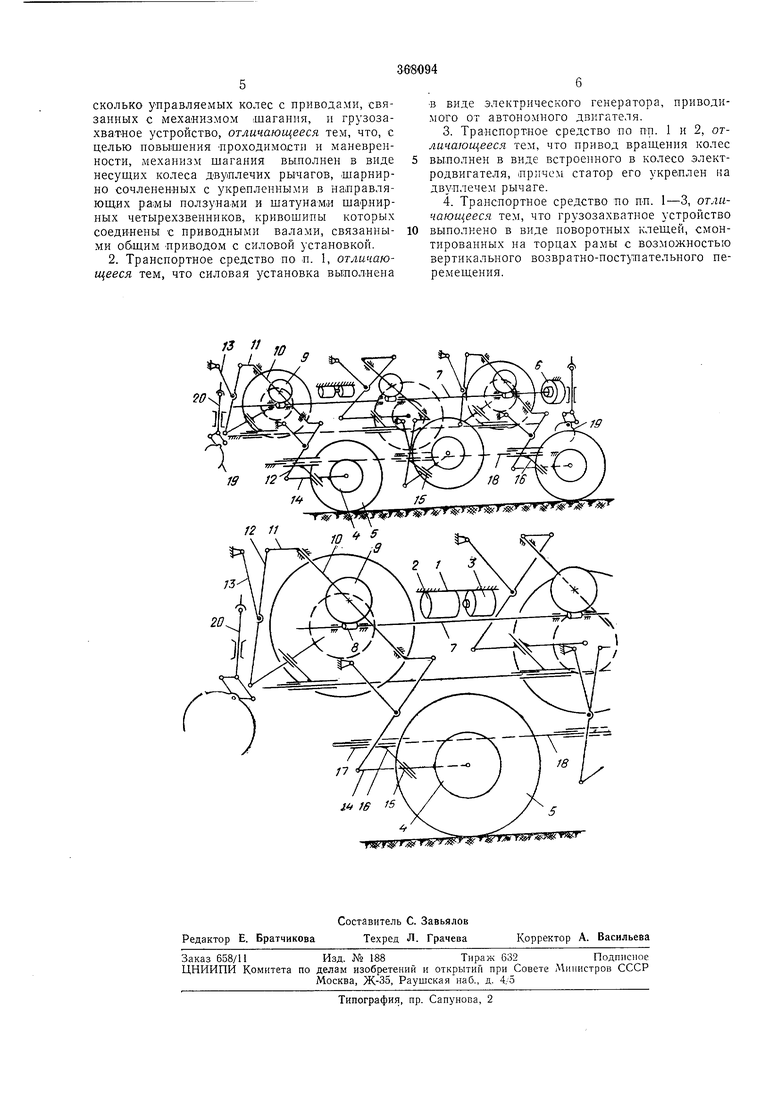
На чертеже схематически изображено описываемое транспортное средство, общий вид.
Транспортное средство содержит П-образную в вертикальной плоскости раму /, на которой смонтированы двигатель 2 силовой установки, включающей электрический генератор 3, электродвигатель 4, встроенный в каждое колесо 5, и электродвигатель 6, соединенный с ведущим валом 7 привода механизма шагания.
На ведущий вал 7 насажены червячные шестерни 8, входящие в зацепление с червячными колесами 9, представляющими собой самотормозящуюся червячную пару.
Червячные колеса насажены на параллельные приводные валы 10, имеющие на концах кривошипы //, повернутые один относительно другого на 180°. Приводные валы расположены друг относительно друга так, что кривошипы 11, находящиеся с одной и той же стороны соседних приводных валов повернуты относительно друг друга на 180°.
Кривошипы 11 шарнирно соединены с шатунами 12 шарнирного четырехзвенника, в коротом шатуны 12 соединены с коромыслами 13.
Кинематически связанные между собой кривошипы //, шатун 12, коромысло 13 и рамы 1 представляют собой четырехзвенный механизм - прямило Чебыше-ва.
Шатуны 12 шарнирно соединены с двуплечими рычагами .14, на которых укреплены статоры электродвигателей 4, роторы которых встроены в колеса 5.
Двуплечие рычаги, несущие на себе колеса, укреплены к раме посредством подшилников 15, пальцев 16 и ползунов 17, размещенных на направляющих 18 рамы /.
Для захвата и подъема груза на торцах рамы смонтированы грузозахватные клещи 19, выполненные с приводом (на чертеже не показан), с возможностью вертикального возвратно-поступательного перемещения посредством (Штанг 20.
Транспортное средство работает следующим образом.
В момент, когда кривощипы 11 всех трех приводных валов 10 находятся в вертикальном положении, оси всех щести колес 5 находятся в одной горизонтальной плоскости, благодаря чему все щесть колес 5 опираются на грунт. Наличие самотормозящихся червячных пар удерживает приводные валы 10 от пр01ворачи;вания « создает условия для устойчивой фиксации в горизонтальной плоскости всех колес 5. При пуске двигателя 2 соединенный с ним электрогенератор 3 вырабатывает электрическую энергию и приводит во вращение все шесть электродвигателей 4, а вместе с ними колеса 5, при этом транспортное средство совершает с помощью вращающихся колес поступательное движение.
Для поворота транспортного средства «ео бходимо изменить напряжение или направление тока, поступающего в три индивидуальных электродвигателя 4, колес 5, расположенных с одного борта транспортного средства, что позволяет изменить скорость или направление их вращения по отношению к колесам, расположенным по другому борту. Тогда, например, для поворота влево при изменении только напряжения в меньщую сторону ток, поступающий в электродвигатели колес 5 левого борта будет меньще; колеса левого борта соверщат путь, меньший, чем колеса правого борта, и траиспортное средство повернет влево.
При изменении направления тока, поступающего в электродвигатели колес 5 левого борта, последние получают обратное вращение по отношению к колесам, расположенным 1ПО другому борту, что вызовет поворот транспортного средства на месте.
Каждое колесо 5 транспортного средства снабжено индивидуальной подвеской, что позволяет осуществлять плавное движение. В момент подхода к препятствию, например бревну, щели, камню, низкой стене, уступу и т. д. или подхода к скользкому, рыхламу, сыпучему или вязкому грунту транспортное средства может быть переведено на режим
шагания. При этом электрический ток поступает в электродвигатель 6, электрические двигатели 4 отключаются, а колеса 5 затормаживаются. Электрический двигатель 6 приводит во вращение ведущий вал 7 и укрепленные на нем червяки 8, которые с помощью червячных колес 9 приводят во вращение приводные валы 10 и кривошипы 11. В результате происходит рассогласованное движение всех шести мехапизмов Чебышева.
В процессе своего движения нижние шарниры щатунов 12 описывают сегментообразные кривые выпуклостью вниз. Эту же траекторию описывают левые щарниры двуплечих
рычагов 14. Правые шарниры двуплечих рычагов 14 описывают сегментообразную траекторию выпуклостью вверх. Так как эти шарниры являются геометрическими осями вращения колес 5, то и колеса 5 описывают эту
траекторию в процессе шагания.
В связи с описанным взаимным расположением кривошипов и крайние два колеса 5, правого борта и одно среднее колесо 5 левого борта движутся синхронно и сипфазно, так
же, как и два крайних колеса 5 левого борта и одно среднее колесо 5 привого борта. Первые три колеса сдвинуты относительно вторых трех колес по фазе движения на 180. Благодаря этому в период времени, когда
первые три колеса описывают криволинейную часть своей траектории, находясь при этом в отдалении от грунта, другие три колеса, находящиеся в контакте с грунтом, описывают прямолинейную часть своей траектории, передавая свое равномерное и прямолинейное движение раме транспортного средства.
В процессе шагания колеса 5 заторможеньь Для поворота в процессе шагания включаются двигатели 4 колес 5, находящиеся по одному борту транспортного средства. Двигатели колес, расположенных по другому борту, в это Время получают противоположно направленное вращение или притормаживаются. В особо неблагоприятных условиях для
перемещения можно осуществлять щагание и катание на колесах одновременно.
Для захвата груза, например бревна, транспортное средство подъезжает к бревну так, чтобы оно оказалось внутри лотка, образованного П-образной рамой /, до полного охвата клещевыми захватами 19 бревна. При движении штанги 20 вверх, между клещевыми захватами 19 и бревном происходит силозамыкание, бревно фиксируется в клещах и в
таком состоянии транспортируется.
Клещи 19 освобождаются от бревна в обратном порядке.
Предмет изобретения
.1. Транспортное средство, например, для
перевозки леса, содержащее раму, несущую
б5 силовую установку и опирающуюся на несколько управляемых колес с приводами, связанных с мехаиизмом шагания, п грузозахватное устройство, отличающееся тем, что, с целью повышения проходимости и маневренности, механизм шагания выполнен в виде несущих колеса двуплечих рычагов, шарнирно сочлененных с укрепленными в направляюш,их p:aiMbi ползунами и шатунами шарнирных четырехзвенников, кривошипы которых соеди-нены с приводными валами, связанными общим Приводом с силовой установкой.
2. Транспортное средство по л. I, отличающееся тем, что силовая установка вьтоЛНена
В виде электрического генератора, приводимого от автономного двигателя.
3.Транспортное средство по пп. 1 и 2, отличающееся тем, что привод вращения колес выполнен в виде встроенного в колесо электродвигателя, причем статор его укреплен ка двуплечем рычаге.
4.Транспортное средство по ИП. 1-3, отличающееся тем, что грузозахватное устройство выполнено в виде поворотных клеш.ей, смонтированных на торцах рамы с возможностью вертикального возвратно-поступательного перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 2012 |
|
RU2495562C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| Устройство привода двухстворчатой двери | 2021 |
|
RU2784881C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
/J //
