I
Изобретение относится к транспортному машиностроению, в частности к шагающи.м устройствам, предназлаченным для передвижения вне дорог; оно может быть использовано при разработке полезных ископаемых в строительстве, космонавтике и других областях/
Известно шагающее транспортное средство, содержашее шагающие опоры, шарнирно связанные с корпусом, и приводной вал, на которо.м установлены кулачки, взаимодействующие с шагающими опорами 1. При вращенни приводного вала кулачки обеспечивают движение шагающих опор по жесткой программе.
Недостатками этого транспортного средства являются низкий КПД, отсутствие средств адаптации к опорной поверхности и отсутствие поворота.
. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является шагающее транспортное средство, содержащее установленный на корпусе автономный двигатель, шагающие опоры, выполненные с возможностью движения по замкнутым траекториям, и механизм шагания, обеспечивающ.. указанную возможность движения в заданных фазах 2.
Недостатками этого транспортного средства являются низкая про.ходимость и маневренность, обусловленные конструкцией механизма шагания, предусматривающего полную кинематическую определенность шагающих опор, отсутствие средств адаптации к неровностям почвы и отсутствие механизма поворота. Кроме того, изменение скорости движения может быть достигнуто только изменением числа оборотов приводного вала механизма шагания, что вызывает большие динамические нагрузки в возвратно-поступательных деталях привода щагающих опор.
Целью изобретения является повышение проходимости и маневренности.
Поставленная цель достигается тем, что каждая шагающая оиора выполнена в виде плоского двухзвенного рычажного механизма, верхний рычаг которого закреплен на корпусе посредством двухстепенного шарнира, и снабжена средством адаптации, механизм шагания каждой опоры побортно расположенных опор, состоит из приводов вертикального и продольного перемещений первый из которых содержит кривошип, соединенный гибкими связями с верхними рычагами опор, второй содержит шарнирно установленный на корпусе двухштоковый гидравлический плунжер, каждый шток которого шарнирно соединен с верхним рычагом опоры через гидроцилиндр, связанный с гидросистемой pyvieBoro управления, причем корпус этого плунжера соединен приводом возвратно-поступательного перемещения с механизмом изменения длины шага всех опор.
Средство адаптации содержит гидроцилиндр одностороннего действия, гидроаккумулятор, концевой выключате/ть и двухпозиционный электрогидравлический кланан, причем гидроцилиндр шарнирно прикреплен к верхнему рычагу опоры и двухстепенному шарниру, а его рабочая полость соединена с гидроаккумулятором через двухпозиционный электрогидравлический к.чапан, электрическая часть которого подключена к концевому вь ключателю, установленному последовательно с гибкой связью.
Привод возвратно-поступате тьного перемещения содержит гидроусилитель у которого щток силового цилиндра щарнирно соединен с корпусом двухштокового гидравлическо1о плунжера, а распределительный золотннк связ.ан с механизмом изменения длины шага.
А1е.ханизм изменения длины шага выполнен в виде кулачка, который имеет переменный профиль вдоль оси и установлен на приводном валу с возможностью осевого перемещения посредством рычага управления.
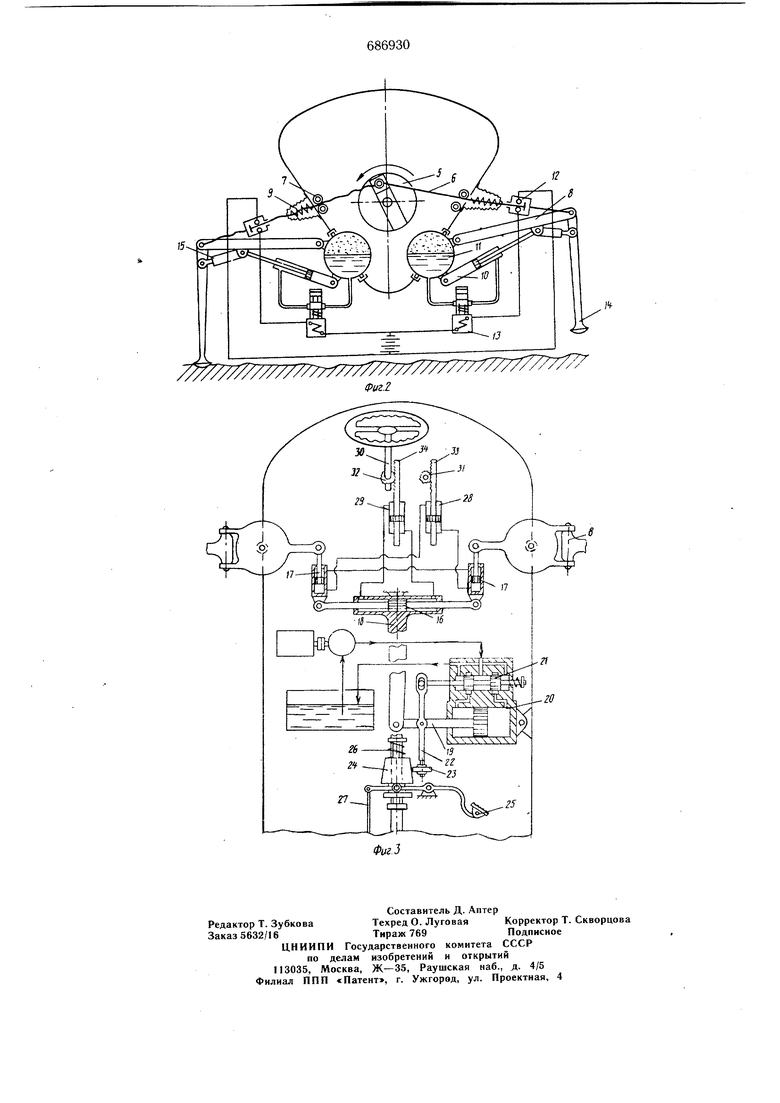
На фиг. 1 схематически изображено предлагаемое устройство, общий вид; на фиг. 2 привод вертикального перемещения шагающих опор и средство для адаптации; на фиг. 3 - привод продольного перемещепия щагающнх опор с гидросистемой рулевого управления и механизмом изменения длины щага.
Шагающее транспортное средство содержит корпус 1, на котором подвижно установлены при помощи двухстепенных шарниров щагающие опоры 2, а также автономный двигатель 3 с горизонтально расположенным вдоль корпуса приводным валом 4.
Привод вертикального перемещения для каждой пары побортно расположенных шагающи.х опор содержит установленный на валу 4 кривошип 5 с гибкими связями 6, соединяющими через направляющие ролики 7 верхние рычаги 8 шагающих опор 2 с пальцем кривощипа 5. Гибкие связи 6 снабжены амортизаторами 9.
Каждая опора 2 снабжена средством адаптации, содержащим гидроцилиндр 10
одностороннего действия, гидроаккумулятор 11, концевой выключатель 12 и двухпозиционный электрогидравлический клапан 13. Гидроцилиндр 10 шарнирно прикреплен к верхнему рычагу 8 и двухстепенному шарниру, а его рабочая полость соединена с гидроаккумулятором 11 через двухпозиционный электрогидравлический клапан 13, электрическая часть которого подключена к концевому выключателю 12, установленному последовательно с гибкой связью 6. Верхние 8 и нижние 14 рычаги опор 2 шарнирно соединены между собой амортизаторами 15, например пружинными.
Привод продольного перемещения для каждой пары побортно расположенных опор
2 содержит шарнирно установленный на корпусе 1 двухштоковый гидравлический плунжер 16 (см. фиг. 3), штоки которого шарнирно соединены с верхними рычагами 8 опор 2 через гидроцилиндры 17, а корпус 18
0 двухштокового плунжера 16 шарнирно соединен со штоком 19 силового цилиндра 20 гидроусилителя, распределительный золотник 21 которого через рычаг 22 обратной связи с роликом 23 взаимодействует с кулачком 24, кинематически связанным с ры чагом 25 управления длиной шага всех опор. Все кулачки 24 подпружинены эластичны.ми элементами 26 и вьшолнены с переменным профилем вдоль своей оси. КулачO ки 24 установлены с возможностью перемещения в осевом направлении по валу 4 и соединены между собой тягами 27.
Привод продольного перемещения опор содержит рулевое управление, включающее гидроцилиндры 28 и 29, соединенные трубопроводами с рабочими полостями двухшто кового плунжера 16 и гидроцилиндрами 17, рулевой вал 30 с установленными на нем зубчатыми колесами 31 и 32, взаимодействующими со щтоками 33 и 34 гидроцилиндров 28 и 29.
д Транспортное средство работает следующим образом.
Вращение от установленного на корпусе 1 автономного двигателя 3 передается продольному валу 4.
5Кривощипы 5, закрепленные на валу 4
через гибкие связи 6 и направляющие ролики 7 взаимодействуют с верхними рычагами 8 опор 2, попеременно поднимая и опуская правые и левые опоры 2. При совершеP НИИ опорой холостого хода, когда гибкая связь 6 натянута (на фиг. 2 справа) концевой выключате«аь 12 замкнут и подает питание на электрическую часть двухпозиционного электрогидравлического клапана 13. В этом положении клапан 13 соединяет рабочую
5, ПОЛОСТЬ гидроцилиндра 10 с гидроаккумулятором 11, и жидкость свободно перетекает из гидроцилиндра 10 в гидроаккумулятор 11 при подъеме опоры 2 и в обратном направлеНИИ при ее опускании. Незначительное избыточное давление в гидроаккумуляторе 11 необходимо лишь для надежного заполнения гидроцилиндра 10 рабочей жидкостью, так как сама опора 2 онускается под собственным весом.
В момент касания шагающей опорой грунта натяжение гибкой связи 6 ослабевает (на фиг. 2 слева), и концевой выключатель 12 размыкает электрическую цепь питания электрической части клапана 13, Последний при этом отключает гидроаккумулятор 11 от гидроцилиндра 10 и запирает его. Так как в это время противоположная по борту опора 2 совершает холостой ход, запертый гидроцилиндр 10 воспринимает вертикальную нагрузку от веса транспортного средства. Пружинные амортизаторы 9 снижают динамические нагрузки в момент начала подъема шагаюших опор и исключают образование в гибких связях 6, когда опоры находятся в контакте с грунтом. Одновременно с вертикальным перемещением шагающих опор осуществляется их продольное перемещение. Вращение кулачка 24, профилированного по заданному закону движения, вызывает через рычаг 22 обратной связи смещение золотника 21. В результате жидкость поступает в соответствующую полость силового цилиндра 20. При этом шток 19 цилиндра 20 смещается на некоторую величину, пропорциональную перемещению ролика 23 рычага 22 обратной связи.
Перемещение штока 19 цилиндра 20 вызывает поворот двухщтокового гидравлического плунжера 16, а вместе с ним гидроцилиндры 17 - поворот шагающих опор 2. Один оборот кулачка 24 соответствует двойному перемещению опоры 2 (в прямом и обратном направлениях).
Так как все кулачки последовательно соединены между собой тягами 27, при нажатии водитетем на рычаг 25 все кулачки 24 перемещаются на щлицах вала 4 на одинаковую величину, изменяя благодаря переменному в осевом направлении профилю кулачка 24 амплитуду колебания золотника 21, а следовательно, и длину шага опор 2. При отпускании рычага 25 все кулачки 24 под действием пружины 26 возвращаются в исходное положение.
Для устранения деформаций опор 2 в поперечной плоскости верхние 8 и нижние 14 рычаги соединены между собой амортизаторами 15. При совершении опорой 2 холостого хода амортизатор 15 выдвинут на максимальную шину. После касания опорой грунта при движении верхнего рычага 8 по радиусу угол между верхним и нижним рычагами начинает вначале уменьшаться, а затем увеличиваться до первоначальной величины. Амортизаторы 15 при этом отслеживают эти поперечные колебания нижних рычагов 14. Кроме того, амортизаторы обеспечивают поперечную устойчивость транспортного средства на косогоре, так как ограничивают угол отклонения нижних рычагов 14.
Сочетание двух движений шагающих опор 2 (попеременного подъема опускания и движения вдоль корпуса 1) обеспечивает прямолинейное перемещение всего транспортного средства.
Поворот транспортного средства осуществляется следующим образом. При вращении рулевого вала 30, например, вправо установленные на нем зубчатые колеса 31 и 32 перемещают штоки гидроцилиндров 28 и 29. При этом шток левого гидроцилиндра 17 убирается, а шток правого гидроцилиндра 17 выдвигается на такую же величину. Этим достигается поворот шагающих опор 2 на некоторый фазовый угол.
Одновременно с этим происходит смещение двухщтокового плунжера 16 влево. На фиг. 3 показана только первая пара шагающих опор 2, так как третья их пара поворачивается на такой же фазовый угол, как и первая, но с противоположным знаком. Также влево смещается двухштоковый гидравлический плунжер 16. Во второй паре опор 2 прунжер 16 смещается в.дево. а поворот опор на фазовый угол не произво
в результате поворота шагающих опор на фазовые углы и смещения плунжеров 16 влево при колебательном д.-ижении корпусов 18 двухштоковых гидравлических плунжеров 16 транспортное средство будет поворачивать вправо, так как а.мплитуды колебаний левых опор будут больше, чем правых, а измененные начальные фазы колебаний опор будут обеспечивать их движение не татько в продольном, но и в поперечном направлении относительно корпуса 1.
Применение изобретения позволит повысить проходимость и маневренность шагающих устройств за счет средств адаптации и рулевого управления шагающими опорами. Наличие в приводе шагающих опор механизма изменения длины шага всех опор позволит изменять скорость движения транспортного средства без изменения числа оборотов приводного вала.
Формула изобретения
J51. Шагающее транспортное средство, содержащее установленный на корпусе автономный двигатель, шагающие опоры, выполненные с возможностью движения по замкнутым траекториям, и механизм шагания, обеспечивающий указанную возможность движения в заданных фазах, отличающееся тем, что, с целью повышения проходимости и маневренности, каждая шагающая опора выполнена в виде плоского двухзвенного рычажного механизма, верхний рычаг которого закреплен на корпусе посредством двухстепенного шарнира, и снабжена средством адаптации, механизм шагания каждой пары побортно расположенных опор состоит из приводов вертикального и продольного перемещений, первый из которых содержит кривошип, соединенный гибкими связями с верхними рычагами опор, а второй содержит шарнирно установленный на корпусе двухштоковый гидравлический плунжер, каждый шток которого шарнирпо соединен с верхним рычагом опоры через гндроцилипдр, связанный с гидросистемой пмевого управления, причем корпус этого плунжера соединен приводом возвратно-поступательного перемещения с механизмом изменения длины njara всех опор.
2. Транспортное средство по п. 1, отличающееся тем, что средство адаптации содержит гидроцилиндр одностороннего действия, гидроаккумулятор, концевой выключатель и двухпозиционный электрогидравлический клапан, причем гидроцилиндр прикреплен к верхнему рычагу опоры и двухстепенному шарниру, а его рабочая полость соединена с гидроаккумулятором через двухпозиционный электрогидрав;1ический клапан, электрическая часть которого подключена к концевому выключататю, установленному носледовательно с гибкой связью.
3.Транспортное средство по п. 1, отличающееся тем, что привод возвратно-поступательного перемещения содержит гидроycилитeJ ь, у которого шток силового цилиндра шарнирно соединен с корпусом двухщтокового гидравлического плунжера, а распределительный золотник связан с механизмом измерения длины шага.
4.Транспортное средство по п. 1, 3, отличающееся тем, что механизм изменения длины щага выполнен в виде кулачка, который имеет переменный профиль вдоль оси и установлен на приводном валу с возможностью осевого перемещения посредством
рычага управления.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 3331.463, кл. 180-8, опубл. 1967.
2. Авторское свидетельство № 368094, кл. В 60 Р 3/40, 1971.



| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| ВОЗБУДИТЕЛЬ ВИБРАЦИИ | 2001 |
|
RU2199131C1 |
| Транспортное средство с колесно- шагающими движителями | 1978 |
|
SU725941A1 |
| Вездеход | 2023 |
|
RU2803970C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2374119C1 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| Шнековый движитель | 1978 |
|
SU740591A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| Колесно-шагающий движитель транспортного средства | 1982 |
|
SU1110708A1 |