Изобретение относится к области транспортной техники и может быть использовано для повышения проходимости транспортных средств с колесными и шагающими движителями.
Известен шагающий движитель транспортного средства, содержащий кривошип, установленный на корпусе, шарнирно соединенный с шатуном, который средней частью шарнирно соединен с тягой, установленной на корпусе, а свободным концом шарнирно соединен с опорной стойкой, верхняя часть которой подвижно установлена в качающейся направляющей, расположенной на одной вертикальной оси с осью кривошипа, а нижняя шарнирно соединена с опорной пятой. Кроме того, движитель содержит дополнительный кривошип, жестко соединенный с кривошипом, и кулисой, которая жестко соединена с приводом вращения, причем ось вращения кулисы расположена на расстоянии 0,6 длины дополнительного кривошипа от оси вращения кривошипов. Данная схема движителя позволяет при установке спаренных движителей, работающих в противофазе, обеспечить постоянный контакт с грунтом и непрерывное движение корпуса (патент РФ №2009938, МПК B62D 57/032, 30.03.1994).
Недостатками данного шагающего движителя является сложность его конструкции и трудности при маневрировании, а также низкая скорость при движении транспортного средства по хорошим дорогам.
Известен шагающий движитель, содержащий плоский лямбдообразный механизм Чебышева, состоящий из кривошипа, шарнирно связанного с одним концом шатуна, который своей средней частью шарнирно прикреплен к качалке, шарнирно установленной на корпусе, а другой конец шатуна шарнирно соединен со средней частью двуплечего рычага, один конец которого шарнирно связан с опорой, а другой - с дополнительной качалкой, шарнирно установленной на корпусе. Кроме того, он содержит приводной кривошип, жестко соединенный с приводом вращения, и тягу, шарнирно соединяющую приводной кривошип с кривошипом, при этом шатун выполнен угловым (патент РФ №2009936, МПК B62/D 57/032, 30.03.1994).
Недостатками данного шагающего движителя являются малая высота подъема опор, необходимость применения двух движителей для обеспечения непрерывного цикла движения, трудности при маневрировании, а также низкая скорость движения транспортного средства по хорошим дорогам.
Известен гибридный колесно-шагающий движитель, содержащий корпус, пары поперечно разнесенных опорных стоек, выполненных в виде шарнирного двухзвенного механизма и закрепленных посредством сферического шарнира. Корпус выполнен составным из трех одинаковых частей, каждая из частей корпуса выполнена в виде многогранника, части корпуса соединены последовательно по продольной оси симметрии гибким упругим стержнем с возможностью поворота частей корпуса относительно друг друга. С каждой из частей корпуса связана одна пара опорных стоек. Сферический шарнир закреплен в центре боковой поверхности каждой из частей корпуса. Поперечные расстояния между сферическими шарнирами внутри пары стоек, а также продольные расстояния между сферическими шарнирами пар стоек одинаковы. На свободном конце каждой из опорных стоек смонтирован колесный движитель в виде электрического мотор-колеса с тормозной системой (патент РФ №212121, МПК B62D 57/028, 06.07.2022).
Недостатком данной конструкции колесно-шагающего движителя является сложность конструкции и низкая маневренность, а также наличие большого числа приводов, что снижает общую надежность движителя.
Известен водный велосипед, содержащий продольную раму поперечные балки, надувные поплавки, закрепленные к поперечным балкам, сиденье, рулевой механизм и педальный движитель, расположенный в передней части рамы. Движитель состоит из цилиндрического корпуса с кулисной стойкой, двух кулис с центром вращения, расположенном на стойке. Кулисы в верхней части имеют сквозные пазы, скользящие и качающиеся по центру вращения кулис. В средней части кулисы снабжены втулками, вращающимися на осях педалей. Оси педалей зафиксированы к шатунам. Шатуны разведены на угол 180 градусов относительно друг друга и неподвижно связаны между собой осью вращения шатунов. К нижней части кулис закреплены гребные лопасти (патент РФ №187852, МПК B63H 1/36, 20.03.2019).
Недостатком данного конструкции является невозможность ее передвижения по суше.
Наиболее близким техническим решением является колесно-шагающий движитель транспортного средства, содержащий колесную тележку, на раме которой смонтированы силовая подпружиненная стойка с опорной стопой, установленной в П-образной поворотной рамке, механизмы подъема, переваливания и стопорения силовой стойки в поднятом положении, а также силовой привод, включающий электродвигатель и понижающий редуктор с ведущим валом (рис. 1 на стр. 83 в статье: Москалев, О.В. Стенд для исследования взаимодействия опорных элементов (стоп) с грунтом / О.В. Москалев, В.И. Колмаков, В.В. Новиков // Механика и управление движением шагающих машин: Межвуз. сб. науч. тр. / ВолгПИ. - Волгоград, 1990. - Вып.1. - C. 82-87).
Недостатком данного колесно-шагающего движителя является сложность его конструкции, невозможность быстрого движения по хорошим дорогам из-за отсутствия привода колес и их управления при маневрировании.
Задачей изобретения является создание конструкции колесно-шагающего движителя, обеспечивающего высокую проходимость при движении по слабым грунтам и высокую скорость движения и маневренность при движении по хорошим дорогам.
Техническим результатом заявленного изобретения является повышение проходимости, скорости и маневренности транспортного средства при движении по разным типам дорог за счет применения колесных и шагающих движителей, имеющих простую и надежную конструкцию.
Технический результат достигается при использовании колесно-шагающего движителя транспортного средства, содержащего колесную тележку, на раме которой смонтирован шагающий движитель, включающий силовую подпружиненную стойку с опорной стопой, механизмы подъема, переваливания и стопорения силовой стойки, а также силовой привод, включающий электродвигатель и понижающий редуктор с ведущим валом, при этом рама тележки выполнена в виде центральной продольной балки, на которой смонтирована вертикальная опора, в верхней части которой на концах поперечной оси установлены две верхние поворотные втулки, а в нижней части которой установлен двуплечий поворотный рычаг с двумя нижними поворотными втулками, во втулках установлены две подпружиненные силовые стойки с опорными стопами, образующие двуногий шагающий движитель, причем ведущий вал выходит с двух сторон редуктора, один конец ведущего вала через управляемую муфту посредством ременной или цепной передачи соединен с осью двуплечего рычага, образующего вместе с силовым приводом механизм подъема и переваливания силовых стоек, а второй конец ведущего вала посредством ременной или цепной передачи соединен с задней колесной осью тележки, передняя колесная ось которой выполнена поворотной, при этом в средней части каждой из силовых стоек выполнены радиальные отверстия, на верхних поворотных втулках установлены управляемые механизмы стопорения, а на вертикальной опоре установлен механизм фиксации поворота двуплечего рычага.
Благодаря тому, что задняя колесная ось и две подпружиненные стойки с опорными стопами приводятся в движения одним силовым приводом через двуплечий рычаг и ременные или цепные передачи, обеспечивается упрощение конструкции и компоновки колесо-шагающего движителя и повышение его надежности.
В режиме шагания верхние концы силовых стоек за полный цикл поворота двуплечего рычага могут перемещаться внутри верхних поворотных втулок на всем ходе сжатия и разжатия пружин, а нижние концы силовых стоек могут перемещаться внутри нижних поворотных втулок только на нижней половине поворота двуплечего рычага, а в верхней половине поворота двуплечего рычага каждая силовая стойка движется вместе с соответствующей нижней поворотной втулкой вверх и вниз, сжимая и разжимая соответствующую пружину. Подпружиненные силовые стойки, обеспечивают уменьшение нагрузки на колеса тележки, что уменьшает сопротивление их качению по слабым грунтам.
Выполнение передней колесной оси поворотной обеспечивает высокую маневренность колесо-шагающего движителя.
Выполнение в средней части каждой из силовых стоек радиальных отверстий и установка на верхних поворотных втулках управляемых механизмов стопорения, пальцы которых входят в радиальные отверстия, обеспечивает осевую фиксацию обеих силовых стоек в верхнем положении. Вследствие фиксации силовых стоек в верхнем положении с помощью управляемых стопорных механизмов и отключении подъемно-перевалочного механизма с помощью управляемой муфты и механизма фиксации двуплечего рычага обеспечивается максимальный клиренс и снижение инерционных нагрузок при работе только колесного движителя.
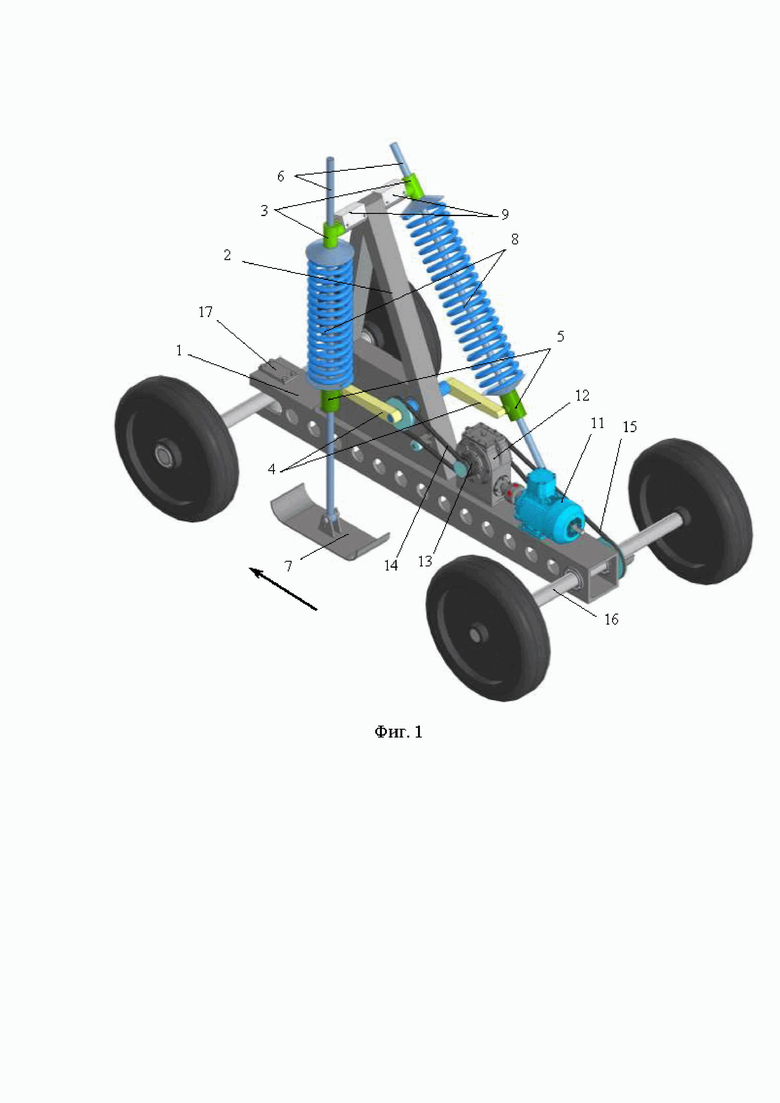
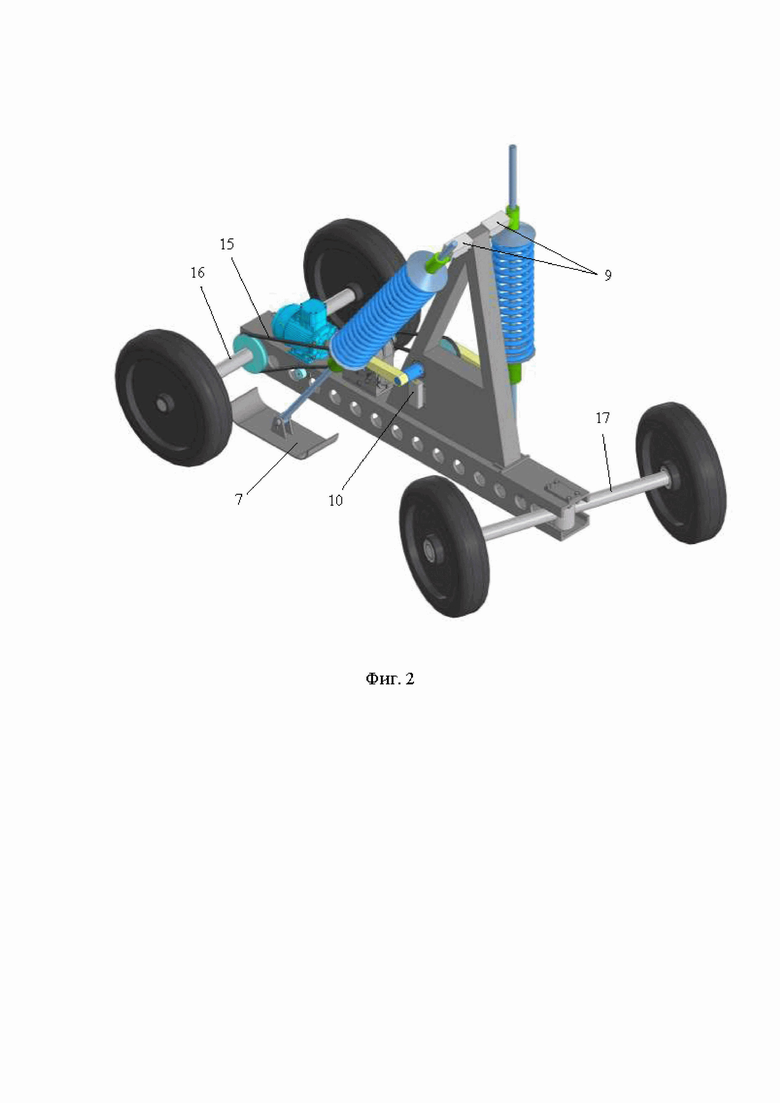
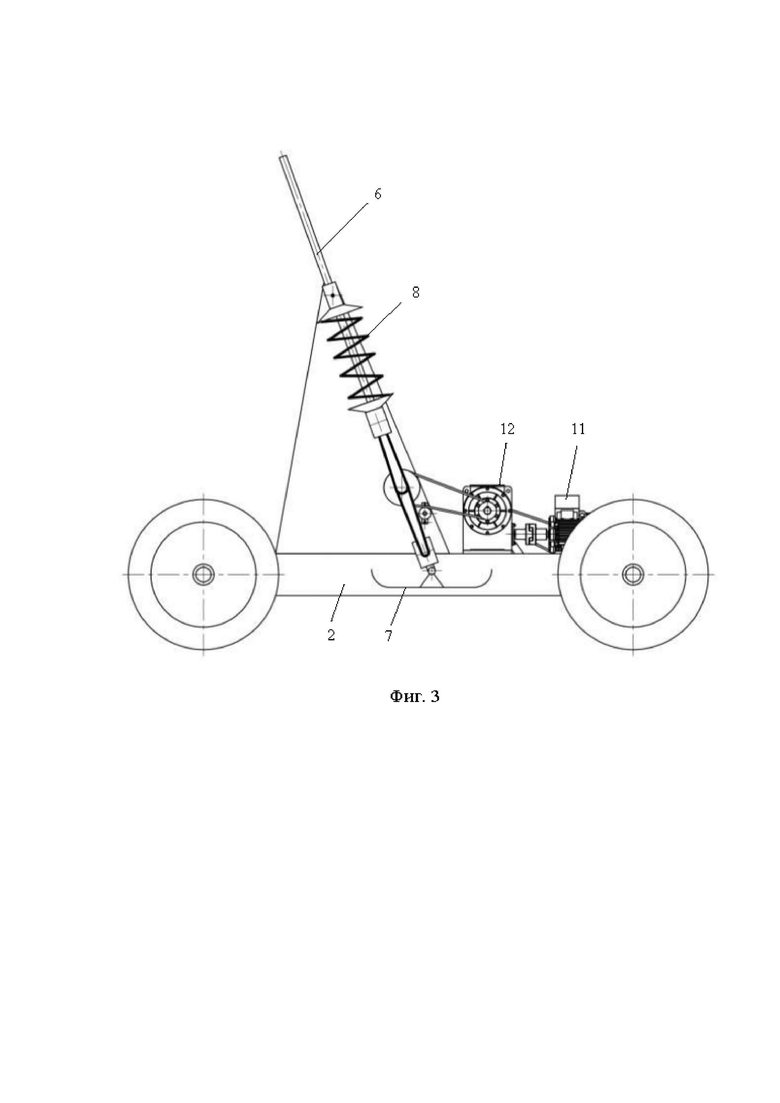
На фиг. 1 представлен общий вид колесно-шагающего движителя транспортного средства, на фиг. 2 - вид сбоку, а на фиг. 3 - схема положение стоек в фиксированном состоянии.
Колесно-шагающий движитель (фиг. 1) содержит двухосную колесную тележку, рама 1 которой выполнена в виде центральной продольной балки. На раме 1 смонтирована вертикальная опора 2, в верхней части которой на концах поперечной оси установлены две верхние поворотные втулки 3, а в нижней части установлен двуплечий поворотный рычаг 4 с двумя нижними поворотными втулками 5. Во втулках 3 и 5 установлены штоки 6 двух силовых подпружиненных стоек, нижние концы которых шарнирно соединены с опорными стопами 7, расположенными с двух сторон рамы 1. На штоках 6 между втулками 3 и 5 установлены пружины сжатия 8. Верхние концы штоков 6 могут перемещаться внутри верхних поворотных втулок 3 на всем ходе сжатия пружин 8. Нижние концы штоков 6 могут перемещаться внутри нижних поворотных втулок 5 только на нижней половине поворота двуплечего поворотного рычага 4 (в фазе опоры стопы 7 на грунт), а на верхней половине поворота двуплечего поворотного рычага 4 (в фазе подъема и переноса стопы 7) каждая силовая стойка 6 движется вместе с соответствующей нижней поворотной втулкой 5 вверх и вниз, сжимая и разжимая пружину 8.
Для осевой фиксации обеих силовых стоек в верхнем положении в средней части штоков 6 выполнены радиальные отверстия, а на верхних поворотных втулках 3 установлены управляемые механизмы стопорения 9, пальцы которых могут входить в радиальные отверстия. Для фиксации опорных стоп 7 в верхнем положении в нижней части вертикальной опоры 2 установлен механизм фиксации 10, палец которого может входить радиальное отверстие, выполненное в оси двуплечего поворотного рычага 4 (фиг.2). Механизмы 9 и 10 выполнены в виде подпружиненных электрофиксаторов, при обесточивании которых их стопорные элементы в виде пальцев под действием пружин выдвигаются наружу и входят в соответствующие отверстия штоков 6 и оси двуплечего поворотного рычага 4.
На раме 1 в задней ее части установлен электродвигатель 11 (фиг.1), подключенный к аккумуляторной батарее (на рисунке не показана). Электродвигатель 11 соединен с понижающим червячным редуктором 12, образуя силовой привод колесно-шагающего движителя. Вместо электродвигателя может быть установлен двигатель внутреннего сгорания. С двух сторон редуктора 12 выходит общий ведущий вал, один конец которого посредством управляемой муфты 13 и ременной или цепной передачи 14 соединен с осью двуплечего поворотного рычага 4, образующего вместе с силовым приводом механизм подъема и переваливания силовых стоек. Управляемая муфта 13 выполнена в виде подпружиненной зубчатой электромуфты, составные части которой при обесточивании разъединяются под действием пружины. Второй конец ведущего вала редуктора 12 посредством ременной или цепной передачи 15 соединен с задней колесной осью 16 тележки, передняя колесная ось 17 которой выполнена поворотной (фиг. 2).
Предлагаемый колесно-шагающий движитель транспортного средства может работать в двух режимах - от привода на заднюю колесную ось и при совместном работе колесного и шагающего движителей.
При движении от привода колес штоки 6 силовых подпружиненных стоек стопорятся в верхнем положении с помощью управляемых механизмов стопорения 9, установленных на верхних поворотных втулках 3. Для этого отключается подаваемое на них электропитание, в результате чего при вращении поворотного двуплечего рычага 4 происходит поочередное поднятие нижних втулок 5 вместе со штоками 6 вверх и сжатие пружин 8. При этом штоки 6 скользят внутри верхних поворотных втулок 3 и в верхнем положении пальцы механизмов стопорения 9 под действием пружин входят в радиальные отверстия на штоках 6, что поочередно фиксирует силовые стойки. Сразу после этого отключается электропитание фиксатора 10 и его палец входит в радиальное отверстие, выполненное в оси двуплечего поворотного рычага 4. Одновременно с этим осуществляется отключение электропитания управляемой муфты 13, вследствие чего происходит отключение ременной или цепной передачи 14 и полная остановка шагающего движителя. При этом силовые стойки располагаются в одной немного наклоненной плоскости, а стопы 7 остаются в максимально поднятом положении, что обеспечивает максимальный клиренс колесной тележке 1 (фиг.3). Ременная или цепная передача 15 остается соединенной с ведущим валом редуктора 12, тем самым обеспечивая привод задней оси 16 колесной тележки 1 при включении электродвигателя 11. В этом режиме работы отключаются инерционные нагрузки, возникающие при работе шагающего привода, что позволяет развивать высокие скорости передвижения по дорогам с относительно твердой опорной поверхностью.
При движении по слабым грунтам с небольшой скоростью колесный и шагающий движители работают совместно. При работе шагающего движителя подается электропитание на механизмы стопорения 9 и 10 и муфту 13, которые обеспечивают отключение фиксации штоков 6 и оси поворота двуплечего рычага 4 и включают его вращение посредством ременной или цепной передачи 14, обеспечивающей передачу момента от электродвигателя 11 и редуктора 12 на силовые стойки. При этом одна силовая стойка находится в фазе подъема и переноса опорной стопы 7, а вторая опорная стопа 7 находится в фазе контакта с грунтом, совершая поворот относительно шарнира стопы 7 в вертикальной плоскости и толкая вперед колесную тележку. При этом толкающее движение вперед обеспечивается за счет двух факторов - от разжатия пружины 8 и наклона штока 6 силовой подпружиненной стойки, создающей горизонтальную составляющую от силы пружины 8, а также от возникновения толкающего момента, связанного с воздействием на шток 6 перпендикулярной ему силы от взаимодействия нижней поворотной втулки 5 двуплечего рычага 4 на шток 6. При повороте двуплечего поворотного рычага 4 нижняя втулка 5 скользит по штоку 6 силовой стойки, который перемещается вниз в верхней поворотной втулке 3, тем самым разжимая пружину 8, которая толкает вертикальную опору 2 и раму 1 по ходу движения колесно-шагающего движителя. Разжатие пружины 8 проходит до фазы подъема опорной стопы 7 и силовой стойки 6, когда нижняя втулка 5 начинает сжимать пружину 8, накапливая энергию для последующего шага. В этот момент происходит опускание и контакт с грунтом второй опорной стопы 7, расположенной с другой стороны рамы 1 колесной тележки, которая работает аналогично первой.
При маневрировании колесно-шагающий движитель может работать, как и в режиме движения по слабому грунту, так и в режиме движения по хорошему грунту. Само маневрирование обеспечивается путем поворота передней колесной оси 17 установленной на передней части рамы.
В результате применения заявленного колесно-шагающего движителя обеспечивается повышение проходимости, скорости и маневренности транспортного средства при движении по разным типам дорог за счет совместной или раздельной работы колесных и шагающих движителей, имеющих простую и надежную конструкцию.
Таким образом, колесно-шагающий движитель транспортного средства, содержащий колесную тележку с рамой в виде центральной продольной балки, на которой смонтирована вертикальная опора, в верхней части которой на концах поперечной оси установлены две верхние поворотные втулки, а в нижней части которой установлен двуплечий поворотный рычаг с двумя нижними поворотными втулками, с установленными во втулках двумя подпружиненными силовыми стойками с опорными стопами, образующими двуногий шагающий движитель, с установленным на понижающем редукторе двусторонним ведущим валом, один конец которого через управляемую муфту посредством ременной или цепной передачи соединен с осью двуплечего рычага, образующего вместе с силовым приводом механизм подъема и переваливания силовых стоек, а второй конец посредством ременной или цепной передачи соединен с задней колесной осью тележки, передняя колесная ось которой выполнена поворотной, с выполненными в средней части каждой из силовых стоек радиальными отверстиями и установленными на верхних поворотных втулках управляемыми механизмами стопорения, и установленным на вертикальной опоре механизмом фиксации поворота двуплечего рычага, обеспечивает повышение проходимости, скорости и маневренности транспортного средства при движении по разным типам дорог за счет применения колесных и шагающих движителей, имеющих простую и надежную конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 1995 |
|
RU2108708C1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496305C1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 2012 |
|
RU2495562C1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| Тележка для инвалидов | 1989 |
|
SU1787435A1 |
| Омниколесная роботизированная грузовая тележка | 2020 |
|
RU2736553C1 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
Изобретение относится к области транспортной техники. Колесно-шагающий движитель транспортного средства содержит колесную тележку, на раме которой смонтирован шагающий движитель, включающий силовую подпружиненную стойку с опорной стопой, механизмы подъема, переваливания и стопорения силовой стойки, и силовой привод, включающий электродвигатель и понижающий редуктор с ведущим валом. Рама тележки выполнена в виде центральной продольной балки, на которой смонтирована вертикальная опора. В верхней части опоры установлены две верхние поворотные втулки, а в нижней части установлен двуплечий поворотный рычаг с двумя нижними поворотными втулками. Во втулках установлены две подпружиненные силовые стойки с опорными стопами, образующие двуногий шагающий движитель. Ведущий вал выходит с двух сторон редуктора, один конец ведущего вала через управляемую муфту посредством ременной или цепной передачи соединен с осью двуплечего рычага, образующего вместе с силовым приводом механизм подъема и переваливания силовых стоек, а второй конец ведущего вала посредством ременной или цепной передачи соединен с задней колесной осью тележки, передняя колесная ось которой выполнена поворотной. Достигается повышение проходимости, скорости и маневренности транспортного средства. 3 ил.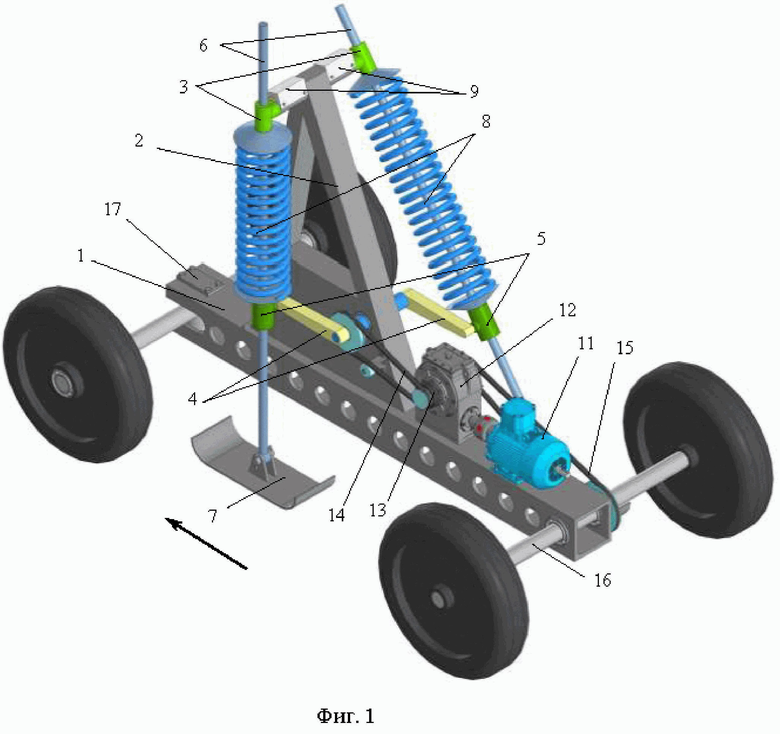
Колесно-шагающий движитель транспортного средства, содержащий колесную тележку, на раме которой смонтирован шагающий движитель, включающий силовую подпружиненную стойку с опорной стопой, механизмы подъема, переваливания и стопорения силовой стойки, а также силовой привод, включающий электродвигатель и понижающий редуктор с ведущим валом, отличающийся тем, что рама тележки выполнена в виде центральной продольной балки, на которой смонтирована вертикальная опора, в верхней части которой на концах поперечной оси установлены две верхние поворотные втулки, а в нижней части которой установлен двуплечий поворотный рычаг с двумя нижними поворотными втулками, во втулках установлены две подпружиненные силовые стойки с опорными стопами, образующие двуногий шагающий движитель, причем ведущий вал выходит с двух сторон редуктора, один конец ведущего вала через управляемую муфту посредством ременной или цепной передачи соединен с осью двуплечего рычага, образующего вместе с силовым приводом механизм подъема и переваливания силовых стоек, а второй конец ведущего вала посредством ременной или цепной передачи соединен с задней колесной осью тележки, передняя колесная ось которой выполнена поворотной, при этом в средней части каждой из силовых стоек выполнены радиальные отверстия, на верхних поворотных втулках установлены управляемые механизмы стопорения, а на вертикальной опоре установлен механизм фиксации поворота двуплечего рычага.
| Запоминающее устройство ассоциативного действия | 1957 |
|
SU119714A1 |
| ДВУХКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2029701C1 |
| US 4479660 A1, 30.10.1984 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| CN 203228864 U, 09.10.2013. | |||

