1
Изобретение относится к области станкостроения и может быть использовано в следящих системах контурного программного управления металлорежущими станками.
Известны электрогидравлические следящие системы с широтно-импульсной модуляцией для управления гидравлическим двигателем.
Цель изобретения - улучшение динамических характеристик системы. Достигается она тем, что устройство формирования широтнонмпульсного алгоритма выполнено в виде цифрового блока дешифрации рассогласования с выходами положительного и отрицательного направлений и блока модуляции с разнесенными выходами включения и выключения расхода, а исполнительная часть содержит блок форсированного переключения электромагнитов усилителя и их поддержки.
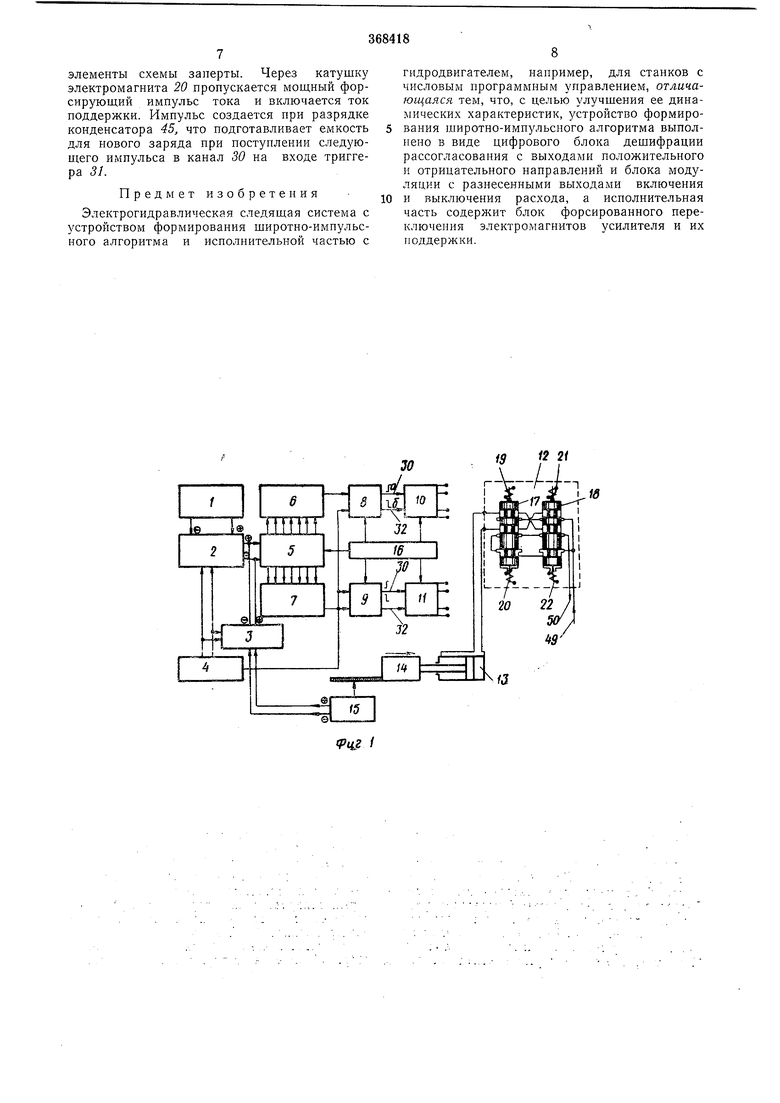
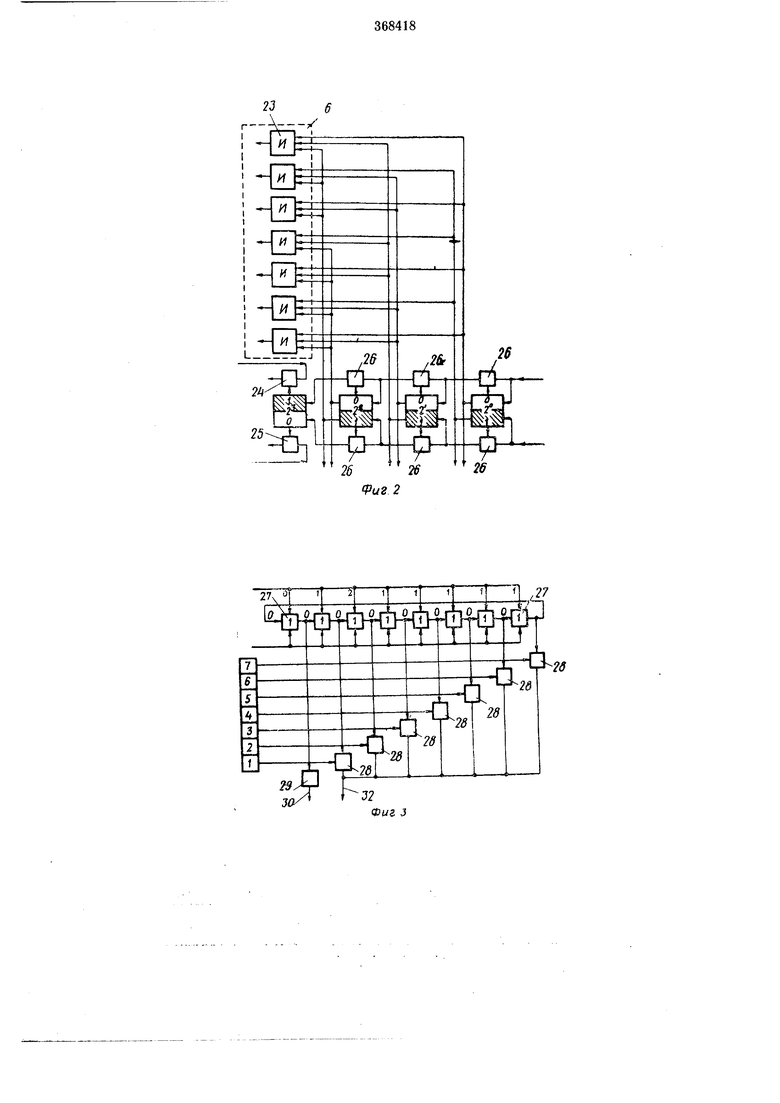
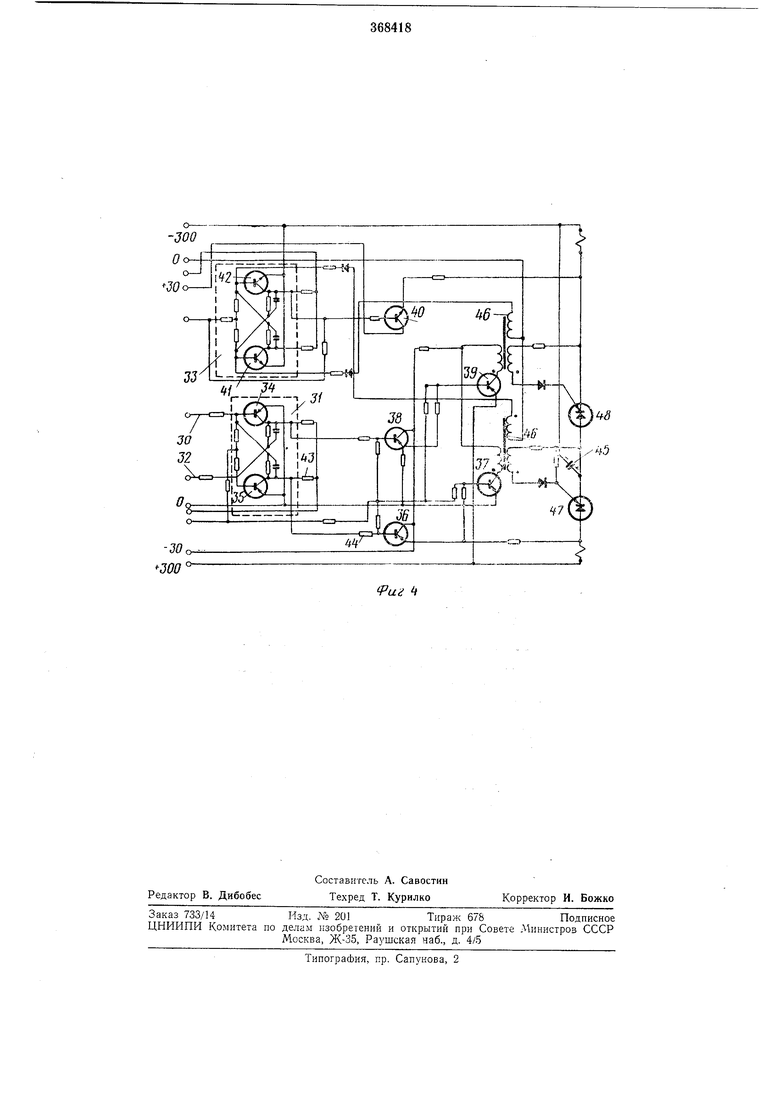
На фиг. 1 дана общая структурная блоксхема описываемой системы; на фиг. 2 - структурная схема двоичного реверсивного счетчика и дешифратора для преобразования приращения объема счетчика из двоичной системы счисления в десятичную; на фиг. 3- структурная схема блока широтно-импульсной модуляции; на фиг. 4 - тиристорная схема блока управления форсированным переключением золотников электрогидравлического релейного блока.
Предлагаемая система включает в себя
блок 1 программы; синхронизаторы управляющих импульсов 2 и импульсов обратной связи 3, служащие для принудительного разделения во времени импульсов, программы и импульсов обратной связи; генератор 4 тактовых импульсов, задаюищй тактирующие частоты синхронизаторам и несущую частоту всей системе; реверсивный счетчик 5, являющийся устройством сравнения сигналов программы и
обратной связи; дешифраторы положительного 5 и отрицательного 7 направлений для перевода рассогласования в десятичную систему счисления; блоки S и 9 широтно-импульсной модуляции положительного и отрицательного
направлений для модуляции по ширине импульсов несущей частоты; блоки 10 и 11 управления положительного и отрицательного направлений для форсированного переключения золотников электрогидравлического релейного блока и поддержки золотников в нужном положении в паузах между управляющими импульсами; электрогидравлический релейный блок 12 для формирования импульсов расхода в режиме насыщения, разгрузки
насоса и запирания гидродвигателя в выключенном состоянии; гидроцилиндр или гидромотор 13; исполнительный орган 14, например стол станка; система 15 обратной связи; датчик 16 исходного состояния для подготовки
системы к работе.
В корпусе блока 12 смонтированы два свободно плавающих двухпозиционных трехкромочных золотника 17 и 18, управляемых электромагнитами 19-22 толкающего действия Нормальное положение обоих золотников соответствует верхнему их положению на чертеже, при этом включены электромагниты 20 и 22. Каждый золотник имеет две нормально перекрытые (верхние на чертеже) и одну нормально открытую рабочие щели. Величина общего хода золотника такова, что при открытии рабочих щелей устанавливается режим насыщения по расходу, а при перекрытии их происходит надежное запирание гидравлических магистралей, причем одна половина общего хода приходится на открытие магистралей, а другая - на перекрытие.
Каждый счетчик 5 и дещифратор 6 (фиг. 2) положительного исправления содержат семь логических схем «И 23 и вентили 24-26.
Основными элементами блока 8 широтноимпульсной модуляции (фиг. 3) являются делитель 1:8, состоящий из восьми ферротранзнсторных ячеек 27, семь вентилей 28, управляемых соответствующими выходами дещифратора, вентиль 29 выхода в канал 30, управляемый триггером старщего разряда счетчика 5.
Блок 10 управления положительного направления (фиг. 4) содержит триггер 31 с каналами 30 и 32, вспомогательный триггер 33, транзисторы 34-42, сопротивления 43 и 44, конденсатор 45, импульсный трансформатор 46, тиристоры 47 и 48. Схема блока // управления отрицательного направления аналогична.
Б режиме слежения импульсы программы от интерполятора иди с магнитной ленты блока ,1 программу после синхронизации частотой А, от генератора 4 тактовых импульсов поступают на один из входов двоичного реверсивного счетчика 5. Кроме того, на вход этого счетчика поступают имнульсы обратной связи после синхронизации частотой AZ от генератора тактовых импульсов. . Таким образом, число импульсов в реверсивном .счетчике представляет ощибку системы в импульсной форме и двоичной системе счисления. В дещифраторах 6 и 7 осуществляется перевод из двоичной системы в десятичную, причем дешифратор 6 работает от ощибки положительного знака, а дещифратор 7 -от .рщибки отрицательного знака. Дешифраторы управляют одинаковыми блоками щиротно имцульсной модуляции. В этих блоках :число, содержащееся в счетчике, модулирует по, щйр.ине последовательность импульсов,, несущая частота которых задаётся тактами частоты .Б от генератора тактовых .импульсов.
.В результате модуляции на выходе работающего блока 8 или 9 в каждый период несущей частоты появляются два мгновенных импульса с временным смещением, зависящим от глубины модуляции. Первый импульс появляется в канале 30 в момент времени, задаваемый тактовой частотой Б, а второй - в канале 32 в момент времени, определяемый состоянием реверсивного счетчика. Таким образом, под щириной модулированного импульса в данной системе следует понимать отрезок времени между появлением импульсов в каналах 30 и 32.
Импульсы с блоков 5 и 9 поступают на вход тиристорных блоков 10 и 11 управления включением электромагнитов 19-22 электрогидравлического релейного блока.
Если ощибка в реверсивном счетчике положительная, работает группа блоков: дещиф 5 ратор 6, блок 8 щиротно-импульсной модуляции, блок 10 управления, при этом импульс, появившийся в канале 30, приводит к срабатыванию электромагнита 19, а импульс в канале 32 - к срабатыванию электромагнита 20
0 и выключению электромагнита 21. Ааналогично при отрицательной ощибке в реверсивном счетчике работает группа блоков: дешифратор 7, блок 9 широтно-импульсной модуляции, блок // управления; при этом импульс, появившийся в канале 30, приводит к срабатыванию электромагнита 21, а импульс, появившийся в канале 32, - к срабатыванию электромагнита 22 и выключению электромагнита 21.
Каждый электромагнит включается с мощной форсировкой и последующим автоматическим снижением приложенного к катушке напряжения до уровня поддерл ки. Форсировка позволяет сократить время переброса золотника до величины, меньшей 0,001 сек. Время включенного состояния электромагнита 19 определяет продолжительность подачи рабочей жидкости в левую полость гидроцилиндра 13 и слива рабочей жидкости из правой полости при движении в положительном направлении, а время включенного состояния электромагнита 20 - наузу между подачей импульсов расхода при движении и положительном направлении (в паузе обе полости
3 гидроцилиндра заперты); время включенного состояния электромагнИта 21 - продолжительность подачи рабочей жидкости в правую полость гидроцилиндра 13 и слива рабочей жидкости из левой полости при движении в
0 отрицательном направлении (в паузе обе полости гидроцилиндра заперты).
При появлении импульса в канале 30 на выходе блока 8 блок 10 подключает катушку электромагнита 19 к источнику высокого напряжения, якорь электромагнита 19 менее чем за 0,001 сек переместит золотник 17 в нижнее положение, после чего напряжение, приложенное к электромагниту 19, уменьшится до уровня поддержки. Как только золотник 17 перемещается в нижнее положение, насосная магистраль 49 подключается к левой полости тидроцилиндра 13, а правая полость соединяется с баком через магистраль 50. Поршень гидроцилиндра начнет перемещаться по
стрелке с максимально возможным ускорением. При появлении импульса в канале S2 на выходе блока 8 блок 10 снимает напряжение поддержки с электромагнита 19 и подключает к источнику высокого напряжения катушку электромагнита 20. Золотник 17 перемещается в верхнее положение, после чего напряжение, приложенное к электромагниту 20, падает до уровня поддержки. Насосная магистраль 49 через связанные последовательно нормально открытые рабочие щели золотников соединяется с баком, насос разгружается. В это время обе полости гидроцилиндра 13 заперты и поршень начинает тормозиться до полной остановки, пока следующий импульс в канале 30 на выходе блока 8 не заставит золотник 17 вновь переместиться вниз и т. д.
Таким образом, при появлении управляющего сигнала в гидроцилиндр 13 начинает поступать рабочая жидкость непрерывной последовательностью импульсов, частота которых обусловлена несущей частотой Б, а ширина каждого отдельного импульса - текущим состоянием реверсивного счетчика.
Вследствие того, что при каждом включении открываются щели с большими проходными сечениями, дроссельные потери сведены к минимуму, система работает в режиме насыщения по расходу. Большая скорость перемещения золотника обеспечивает открытие или закрытие каналов подачи жидкости сразу же после получения командного .импульса, в результате создается практически безинерционная связь электронной системы управления с гидравлической исполнительной частью.
Работа системы при подаче управляющих импульсов отрицательного направления, подаваемых с блока 9, аналогична, при этом управляющий импульс в канале 30 вызывает перемещение поршня гидроцилиндра 13 против стрелки.
Порщень гидроцилиндра перемещает исполнительный орган станка, который связан с той или иной системой обратной связи.
Исходному состоянию счетчика 5 соответствует запоминание числа «восемь. Если в счетчике содержится любое число, равное или большее восьми, открыт вентиль 24 выхода управляющих импульсов к блоку 10. Если в счетчике содержится число, меньшее восьми, открыт вентиль 25 выхода управляющих импульсов к блоку 26. Например, состояние «1101 реверсивного счетчика соответствует положительному приращению объема счетчика в пять импульсов. В этом случае сработает пятый элемент «И, на выходе же всех остальных элементов «И управляющего сигнала не будет.
Делитель блока 8 показан на фиг. 3 в исходном положении. Делитель управляется частотой Б от генератора тактовых импульсов. Очередной импульс частоты Б переводит ферротранзисторную ячейку делителя в состояние «1 и, если вентиль 29 открыт, по каналу 30 пройдет открывающий импульс в блок 10. Момент времени, в который в канале 32 появляется закрывающий импульс, зависит от состояния счетчика, дешифратора или вентилей 28. Например, при положительном приращении объема реверсивного счетчика, составляющем пять импульсов, после появления в канале 30 открывающего импульса откроется пятый вентиль 28 и ъ канале 32 появится пятый по счету импульс тактовой частоты Б.
Таким образом, минимальное временное смещение импульсов в каналах 30 и 32 равно одному периоду тактовой частоты Б при положительном приращении объема счетчика в один импульс, а максимальное временное смещение - семи периодам тактовой частоты (при положительном приращении объема счетчика в семь импульсов). Следовательно коэффициент заполнения периода широтно1
импульсной МОДУЛЯЦИИ изменяется от -- чо
8
-. Восьмой импульс тактовой частоты Б воз8
вращает делитель в нсходное состояние, после чего реверсивный счетчик опрашивается заново. Несущая частота в описываемой импульсной системе при структуре делителя 1:8 равна одной восьмой тактовой частоты Б. В случае диапазона изменения ширины при шнротрюимпульсной модуляции более восьми должны быть увеличены объемы реверсивного счетчика, дешифратора и делителя.
Устройство блока широтно-импульсной модуляции отрицательного направления аналогично.
Входным элементом блока управления 10 включением электромагнитов является триггер 31 со входными каналами 30 и 31. При подаче в канал 30 очередного открывающего импульса транзистор 35 закрывается и с сопротивления 43 снимается напряжение источника, которое через сонротивленне 44 приложится к базе транзистора 36 поддержки. Последний откроется, одновременно давая снгнал на открытие транзистора 37 запуска тпрнстора 47. При открытии транзистора 36 через катушку электромагнита 19 начинает протекать ток поддержки по цепи (О-30 в). Открывшийся тиристор 47 образует цепь заряда конденсатора 45 (+300-(-300) в), тем самым задавая форсировочное ускорение электромагниту 19. По окончании заряда конденсатора 45 тиристор 47 будет заперт. Поддерживаемый триггером в открытом состоянии, транзистор 36 обеспечивает прохол-сдение тока поддержки по катун ке электромагнита 19 до прихода закрываюш.его импульса в канале 32 на входе блока управления. Одновременно с открытием тиристора 47 с обмотки импульсного трансформатора 46 подается сигнал управления на вспомогательный триггер 33, который запирает транзистор 40 электромагнита 20 на все время включения поддержки электромагнита 19. При подаче выключающего импульса в канал 31 открываются транзисторы 35, 39, 40, 41 и тиристор 47. Остальные
элементы схемы заперты. Через катушку электромагнита 20 пропускается мощный форсирующий импульс тока и включается ток поддержки. Импульс создается при разрядке конденсатора 45, что подготавливает емкость для нового заряда при поступлении следующего импульса в канал 30 на входе триггера 31.
Предмет изобретения
Электрогидравлическая следящая система с устройством формирования широтно-импульсного алгоритма и исполнительной частью с
гидродвигателем, например, для станков с числовым программным управлением, отличающаяся тем, что, с целью улучшения ее динамических характеристик, устройство формирования широтно-импульсного алгоритма выполнено в виде цифрового блока дешифрации рассогласования с выходами положительного и отрицательного направлений и блока модуляции с разнесенными выходами включения и выключения расхода, а исполнительная часть содержит блок форсированного переключения электромагнитов усилителя и их поддержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНАЯ СЛЕДЯЩАЯ | 1973 |
|
SU370376A1 |
| ЗЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНО-ИМПУЛЬСНА.Я СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292140A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ЦИФРОВАЯ СЛЕДЯЩАЯСИСТЕМА | 1972 |
|
SU330262A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| НУЛЕВОЙ РАДИОМЕТР | 1996 |
|
RU2124213C1 |
| Устройство для управления автономнымиНВЕРТОРОМ | 1979 |
|
SU830631A1 |
| Способ управления трехфазным мостовым инвертором,работающим на двигатель переменного тока,и устройство для его осуществления | 1984 |
|
SU1270850A1 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 2002 |
|
RU2220426C1 |
| Цифровое устройство для управления многофазным импульсным преобразователем | 1989 |
|
SU1735990A1 |
30
LW
27
