1
Изобретение относится к области станкостроения и может |быть использовано в следящих системах контурного управления металлорежущими станками.
Известны электрогидравлические следящие системы с устройством формирования управляющего алгоритма и исполнительной частью с гидродвигателем, иапример для станков с числовым программным управлением. Однако такие системы имеют значительные амплитудные и фазовые потери, а также дроссельные потери в гидроусилителе и пониженлый к.п.д.
Цель изобретения - улучшение динамических характеристик системы.
Для этого устройство формирования управляющего алгоритма выполнено в виде цифрового блока частотно-импульсной модуляции с разнесенными выходами положительных и отрицательных сигналов, а также выходами включения и выключения расхода, а исполнительная часть содержит блок формированного переключения электромагнитов усилителя и их поддержки.
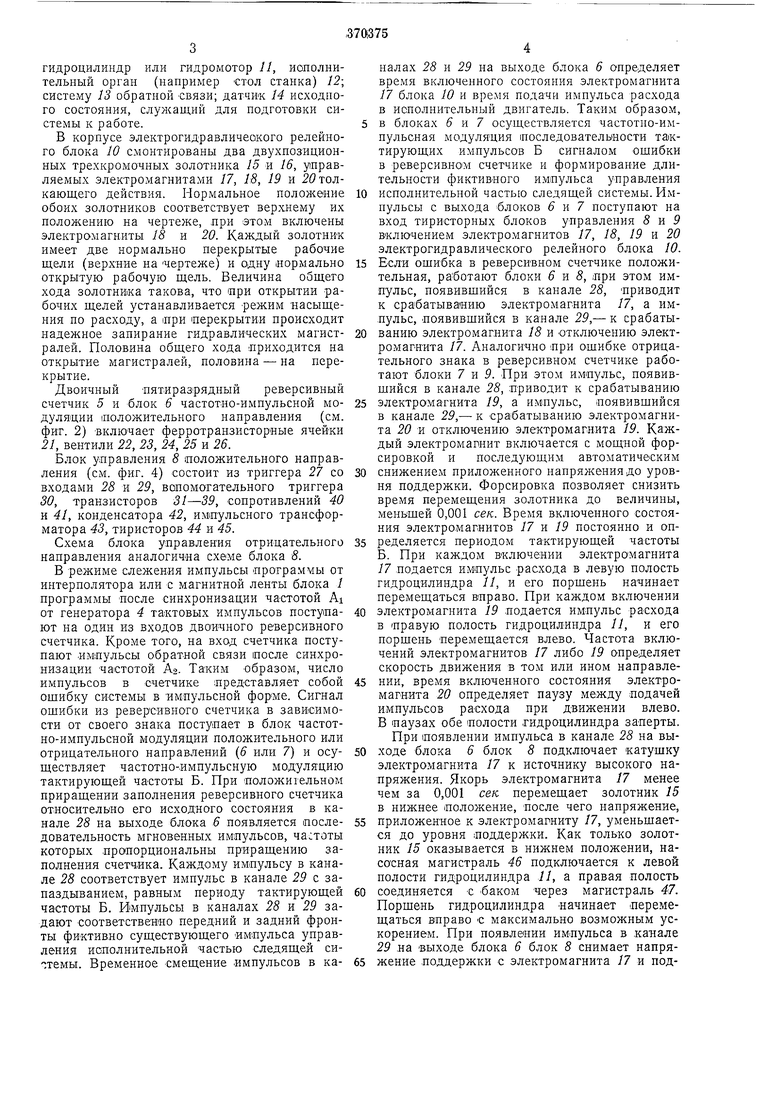
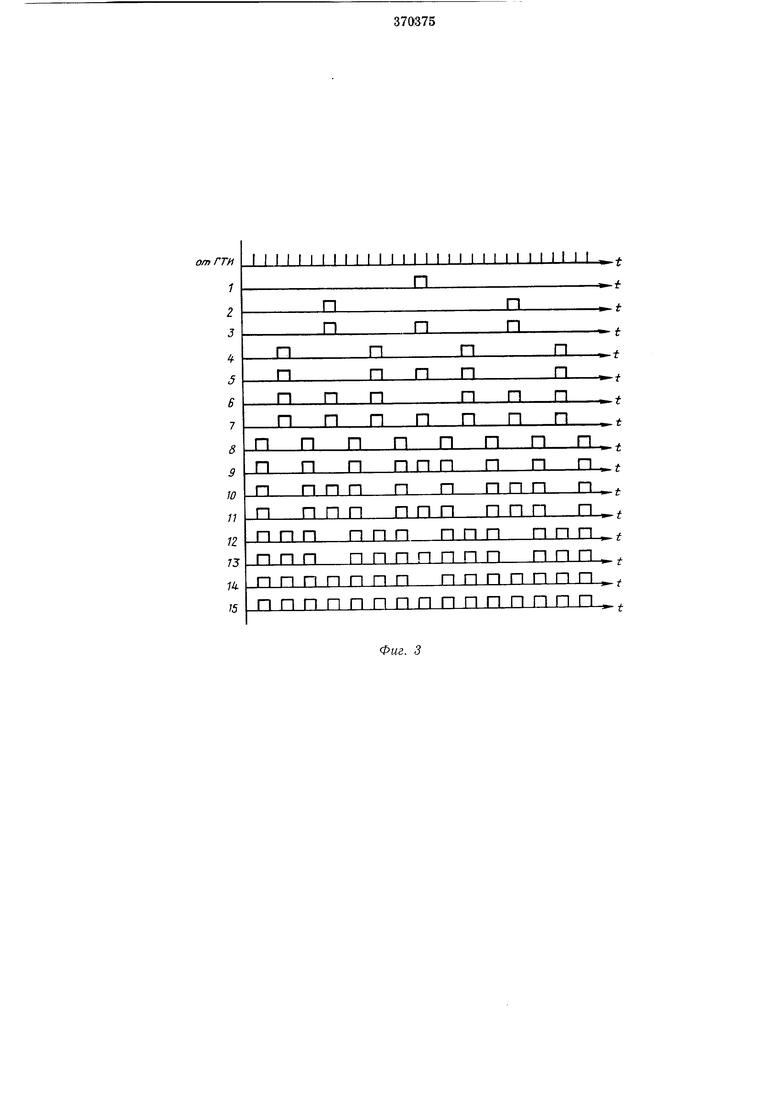
На фиг. 1 показана общая структурная блок-схема предлагаемой системы; на фиг. 2 - структурная схема двоичного -реверсивного счетчика и блока частотно-импульсной модуляции; на фиг. 3-циклограмма работы блока частотно-импульсной .модуляции в зависимости от приращения объема реверсивного счетчика; на фиг. 4 - тиристорная схема управления формированным переключением золотников электрогидравлического релейного
блока.
Система содержит блок 1 программы; синхронизатор 2 управляющих импульсов и синхронизатор 3 импульсов обратной связи, служащие для принудительного разделения во
времени импульсов .программы и импульсов обратной связи; генератор 4 тактовых импульсов, задающий тактирующие частоты синхронизаторам и управляющую частоту блокам частотно-импульсной модуляции; реверсивный
счетчик 5, являющийся устройством сравнения сигналов программы и обратной связи; блоки 6 и 7 частотно-импульсной модуляции положительного и отрицательного направлений для модуляции по частоте последовательности управляющих импульсов от генератора тактовых импульсов; блоки S и 9 управления положительного и отрицательного направлений для форсированного переключения золотников электрогидравлического релейного блока
и поддержки золотников в заданном положении в паузах между управляющими импульсами; электрогидравлический релейный блок 10 для формирования импульсов расхода в режиме насыщения, разгрузки насоса и запираНИН гидродвигателя в выключенном состоянии; гидроцилиндр или гидромотор 11, исполнительный орган (нанример Стол станка) /2; систему 13 обратной связи; датчик 14 исходного состояния, служащий для подготовки системы к работе. В корпусе электрогидравличеокого релейного блока 10 смонтированы два двухпозиционных трехкромочных золотника 15 и 16, управляемых электромагнитами 17, 18, 19 и 20 толкающего действия. Нормальное положение обоих золотников соответствует верхнему их положению на чертеже, при этом включены электромагниты 18 и 20. Каждый золотник имеет две нормально перекрытые рабочие щели (верхние на чертеже) и одну «ормально открытую рабочую щель. Величина общего хода золотника такова, что при открытии рабочих щелей устанавливается режим насыщения по расходу, а три перекрытии происходит надежное запирание гидравлических магистралей. Половина общего хода лриходится на открытие магистралей, половина - на перекрытие. Двоичный пятираз1рядный реверсивный счетчик 5 и блок 6 частотно-импульсной модуляции положительного направления (см. фит. 2) Включает ферротранзисторщые ячей-ки 21, вентили 22, 23, 24, 25 и 26. Блок управления 8 положительного направления (см. фиг. 4) состоит из триггера 27 со входами 28 и 29, вопомотательного триггера 30, транзисторов 31-39, сопротивлений 40 и 41, конденсатора 42, импульсного трансформатора 43, тиристоров 44 и 45. Схема блока управления отрицательного направления аналогична схеме блока 8. В режиме слежения импульсы программы от интерполятора или с магнитной ленты блока / программы после синхронизации частотой AI от генератора 4 тактовых импульсов поступают на один из входов двоичного реверсивного счетчика. Кроме того, на вход счетчика поступают импульсы обратной связи после синхронизации частотой АО. Таким образом, число импульсов в счетчике представляет собой ощибку системы в импульсной форме. Сигнал ошибки из реверсивного счетчика в зависимости от своего знака поступает в блок частотно-импульсной модуляции положительного или отрицательного направлений (6 или 7) и осуществляет частотно-импульсную модуляцию тактирующей частоты Б. При положительном приращении заполнения реверсивного счетчика относительно его исходного состояния в канале 28 на выходе блока 6 появляется последовательность мгновенных импульсов, частоты которых пропорциональны приращению заполнения счетчика. Каждому импульсу в канале 28 соответствует импульс в канале 29 с запаздыванием, равным периоду тактирующей частоты Б. Импульсы в каналах 28 и 29 задают соответственно передний и задний фронты фиктивно существующего импульса управления исполнительной частью следящей . Временное смещение импульсов в каналах 28 и 29 на выходе блока 6 определяет время включенного состояния электромагнита 17 блока 10 и время подачи импульса расхода в исполнительный двигатель. Таким образом, в блоках & и 7 осуществляется частотно-импульсная модуляция последовательности тактирующих импульсов Б сигналом ощибки в реверсивноМ счетчике и формирование длительности фиктивного импульса управления исполнительной частью следящей системы. Импульсы с выхода блоков 5 и 7 поступают на вход тиристорных блоков управления 8 и 9 включением электромагнитов 17, 18, 19 и 20 электрогидравлического релейного блока 10. Если ошибка в реверсивном счетчике положительная, работают блоки 5 и 8, яри этом импульс, появившийся в канале 28, приводит к срабатыванию электромагнита 17, а импульс, появившийся в канале 29,- к срабатыванию электромагнита 18 и отключению электромагнита 17. Аналогично при ошибке отрицательного знака в реверсивном счетчике работают блоки 7 и 9. При этом импульс, появившийся в канале 28, приводит к срабатыванию электромагнита 19, а импульс, появившийся в канале 29,- к срабатыванию электромагнита 20 и отключению электромагнита 19. Каждый электромагнит включается с мощной форсировкой и последующим автоматическим снижением приложенного напряжения до уровня поддержки. Форсировка позволяет снизить время перемещения золотника до величины, меньшей 0,001 сек. Время включенного состояния электромагнитов 17 и 19 постоянно и определяется периодом тактирующей частоты Б. При каждом включении электромагнита 17 подается импульс расхода в левую полость гидроцилиндра 11, и его порщень начинает перемещаться вправо. При каждом включении электромагнита 19 подается импульс расхода в правую полость гидроцилиндра 11, и его порщень перемещается влево. Частота включений электромагнитов 17 либо 19 определяет скорость движения в том или ином направлеНИИ, время включенного состояния электромагнита 20 определяет паузу между подачей импульсов расхода при движении влево. В паузах обе полости .гидроцилиндра заперты. При появлении импульса в канале 28 на выходе блока 6 блок 8 подключает катущку электромагнита 17 к источнику высокого напряжения. Якорь электромагнита 17 менее чем за 0,001 сек перемещает золотник 15 в нижнее положение, после чего напряжение, приложенное к электромагниту 17, уменьшается до уровня поддержки. Как только золотник 15 оказывается в нижнем положении, насосная магистраль 46 подключается к левой полости гидроцилиндра 11, а правая полость соединяется с баком через магистраль 47. Поршень гидроцилиндра начинает перемещаться вправо с максимально возможным ускорением. При появлении импульса в канале 29 на выходе блока 6 блок 8 снимает напряжение поддержки с электромагнита 17 и подключает к источнику высокого напряжения катушку электромагнита 18. Золотник 15 перемещается в верхнее положение, после чего напряжение, приложенное к катушке электромагнита 18, уменьшается до уровня поддержки. Насосная магистраль 46 через связанные последовательно нормально открытые рабочие щели золотников соединяется с баком, насос разгружается. В то же время полости гидроцилиндра 11 заперты, и поршень тормозится до полной остановки, пока следующий импульс в канале 28 не заставит золотник 15 вновь переместиться вииз. Таким образом, при появлении управляющего сигнала в гидроцилиндр поступает непрерывная последовательность импульсов расхода рабочей жидкости, частота которых обусловлена текущим .состоянием реверсивного счетчика, а ширина каждого отдельного импульса постоянна и равна периоду тактирующей частоты Б. В силу тото, что при каждом перемещении золотника 15 вниз открываются щели с больщими проходными сечениями, дроссельные потери сведены к минимуму, система работает в режиме насыщения по расходу. Высокая скорость Перемещения золотника обеспечивает открытие или закрытие каналов жидкости сразу же после получения командного импульса, в результате создается практически безынерционная связь электронной системы с гидравлической исполнительной частью.
Работа системы при подаче управляющих импульсов на вход блока 9 аналогична, при этом управляющий импульс в канале 28 вызывает перемещение поршня гидроцилиндра 11 влево.
Исходному состоянию счетчика 5 (фиг. 2) соответствует запоминание числа 16. Если в счетчике содержится любое число, равное или больше 16, то открывается вентиль 23 выхода управляющих имлульсов по каналу 28 и блок положительного направления 8. Если в счетчике содержится любое число, меньшее 16, открывается вентиль 24 выхода управляющих импульсов ПО каналу 28 к блоку 9 отрицательного направления.
Все нечетные внешние выводы делителя блока частотно-импульсной модуляции объединены на входе вентиля 23 через вентили 22, управляемые триггерами разрядов счетчика. Все четные внешние выводы делителя собраны вместе и подключены непосредственно к каналу 29 выхода в блок управления 8. Делитель управляется частотой Б от генератора тактовых импульсов. Исходное состояние делителя устанавливается по линии сброса, при этом состояние первой ферротранзисторной ячейки 21--О, а всех остальных - 1. Полный цикл работы делителя равен 30 периодам частоты Б, по истечении которых делитель возвращается в исходное состояние. За цикл ко входу первого вентиля 22 поступает один импульс, ко входу второго вентиля 22 - два импульса, ко входу третьего - четыре и ко входу четвертого- восемь. Частота на входе вентиля .2Лпропроциональна изменению состояния реверсивного счетчика относительно его исходного состояния.
Если, например, положительное приращение заполнения счетчика составляет семь импульсов, состояние разрядов счетчика будет 10111 и вентили 23 и первые три вентиля 22 открываются. Тогда за каждый цикл делителя в канале 28 выхода к блоку управления
8 проходит семь импульсов. Вслед за каждым из этих семи импульсов в канале 28 в «анале 29 появляются импульсы со смещением в один период частоты Б. Эти импульсы задают соответственно передний и задний фронты фиктивно существующего импульса управления исполнительной частью следящей системы (см. фиг. 3).
Устройство блока 9 аналогично устройству блока 5.
Входным элементом блока управления 8 включением электромагнитов является триггер 27 с двумя входами 28 и 29. При подаче на вход 28 очередного «открывающего импульса транзистор 32 закрывается и с натрузки 40 снимается напряжение источника, которое через сопротивление 41 прикладывается к базе транзистора поддержки 3,9. Последний отпирается, одновременно давая сигнал на открытие транзистора 34 запуска тиристора
44. При открытии транзистора 33 через катушку электромагнита 17 протекает ток поддержки по цепи (О б) - (30 в}. Открывшийся тиристор 44 образует цепь заряда конденсатора 42 : (--ЬЗОО 0) - (-300 в, тем самым задавая
форсировочиое ускорение электромагниту 17. По окончании заряда конденсатора 42 тиристор 44 заперт. Поддерживаемый триггером в открытом состоянии транзистор поддержки 33 обеспечивает прохождение тока поддержки
по катушке 17 до прихода «закрывающего импульса на вход 29 блока управления. Одновременно с открытием тиристора 44 с обмотки импульсного трансформатора 43 подается сигнал управления на вспо мотательный
триггер 30. который запирает транзистор поддержки 37 электромагнита 18 на все время включения поддержки электромагнита 17. При подаче «выключающего импульса на вход 29 открываются транзисторы 32, 36, 38. 37 и тиристор 45. Остальные элементы схемы заперты. Через катушку электромагнита 18 пропускается мощный импульс и включается ток поддержки. Импульс создается при разряде конденсатора 42, что подготавливает емкость для нового заряда при поступлении последующего и гпульса на вход 28.
Предмет изобретения
Элетсгрогидравлическая следящая система с устройством формирования управляющего алгоритма и исполнительной частью с гидродвигателем, например, для станков с числовым программным управлением, отличающаяся тем, что, с целью улучшения ее динамических характеристик, устройство формирования уп7
равляющето алгоритма выполнено в виде цифрового блока частотно-импульсной модуляции с разнесенными выходами положительных и отрицательных сигналов, а также выходами
включения и выключения расхода, а исполнительная часть содержит блок форсированного переключения электромагнитов усилителя и их поддержки.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU368418A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНАЯ СЛЕДЯЩАЯ | 1973 |
|
SU370376A1 |
| ЗЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНО-ИМПУЛЬСНА.Я СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292140A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ЦИФРОВАЯ СЛЕДЯЩАЯСИСТЕМА | 1972 |
|
SU330262A1 |
| ГИДРАВЛИЧЕСКОЕ ЧАСТОТНО-ИМПУЛЬСНОЕ ПРИВОДНОЕУСТРОЙСТВО | 1971 |
|
SU322529A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| Сейсмический вибратор | 1985 |
|
SU1277036A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1990 |
|
SU1731321A1 |


ЙШ/
Фиг. 3
