Изобретение относится к области станкостроения и может быть использовано, например, в контурных системах программного управления.
Известны электрогидравлические релейноимпульсные следящие системы, в которых в каждом из каналов положительного и отрицательного сигналов рассогласования объемные дозаторы соединены с рабочими полостями одного из золотников каждого золотникового релейного блока с электромагнитным управлением, а в блоке преобразования сигнала рассогласования выходы триггеров реверсивного двоичного счетчика подключены ко входу логического элемента «ИЛИ, вход которого соединен с вентилем открытия одного из входов ферротранзисторных модулей, выходы которых соединены с соответствующими входами блоков управления.
Недостатком известней релейно-импульсной следящей системы является невысокое качество регулирования.
Предлагаемая электрогидравлическая цифровая следящая система отличается тем, что, с целью улучщения качества регулирования выход каждого из п триггеров реверсивного двоичного счетчика подключен к соответствующему вентилю открытия ферротранзисторных модулей, выход каждого из которых через соответствующий блок управления соединен со входом соответствующих электромагнитов, связанных с соответствующими блоками релейных золотников, подключенных к объемным дозаторам. Выходы блоков релейных золотников соединены с рабочими полостями исполнительного цилиндра.
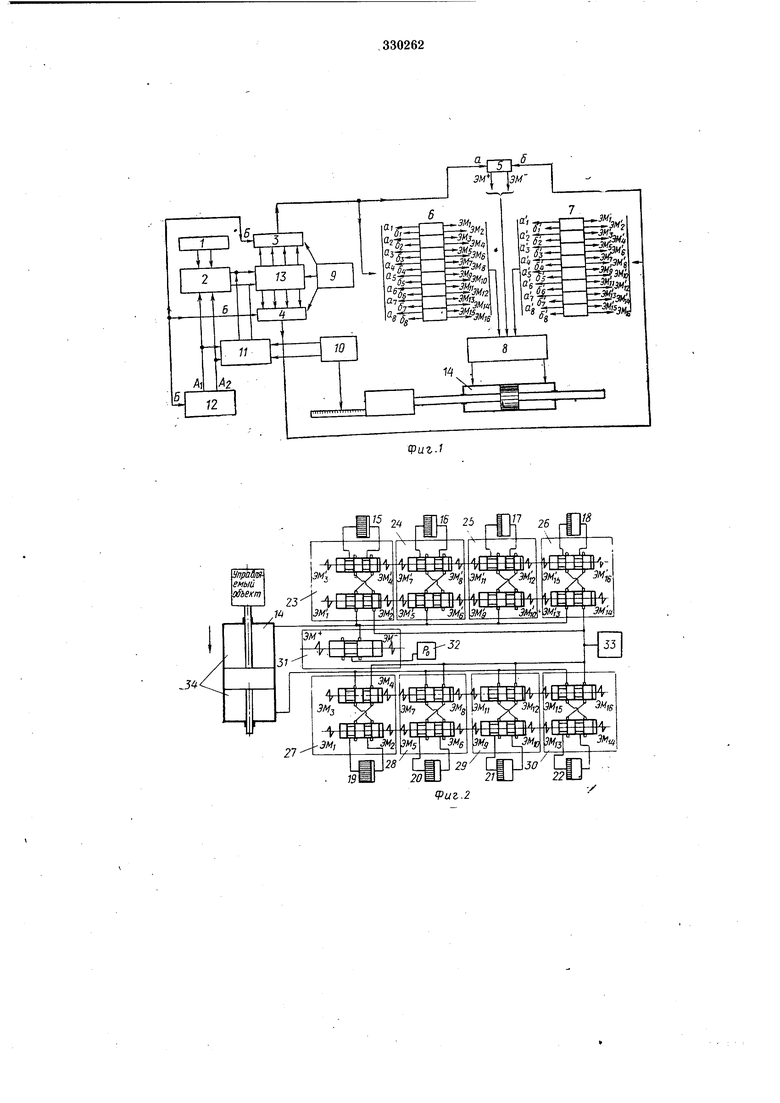
На фиг. 1 приведена общая структурная блок-схема предлагаемой системы, где1 - блок программы; 2 - синхронизатор управляющих импульсов; 3 - блок цифрового преобразования сигнала положительного направления; 4 - блок цифрового преобразования сигнала отрицательного направления; 5 - блок управления переключением, 6 и 7 - блоки управления включением электромагнитов релейных золотников, 8 - электрогидравлический цифровой регулятор; 9 - датчик исходного состояния; 10 - система обратной связи; 11 - синхронизат;ор импульсов обратной связи; 12-генератор тактовых импульсов; 13 - реверсивный счетчик; 14 - исполнительный цилиндр; AI и А - частота синхронизации импульсов; Б - тактовая частота; ai6i, «262, ..., I fli6b аЧба, ..., as68 J - входные каналы;
ЭМ, ЭМ2, ..., ЭЛ«16 1
„,. .,„1 о«1- электромагниты.
ЭМ I, JM 2, -, Э.И 16 I
На фиг. 2 приведена схема электрогидрав.пчческого цифрового регулятора, где: 15-22 - объемные дозаторы; 23-30 - блоки релейных
золотников; 31 - релейный золотник направления; 32 - давление от насоса; 33 - слив; 34 - рабочие полости испол«ительиого цилиндра.
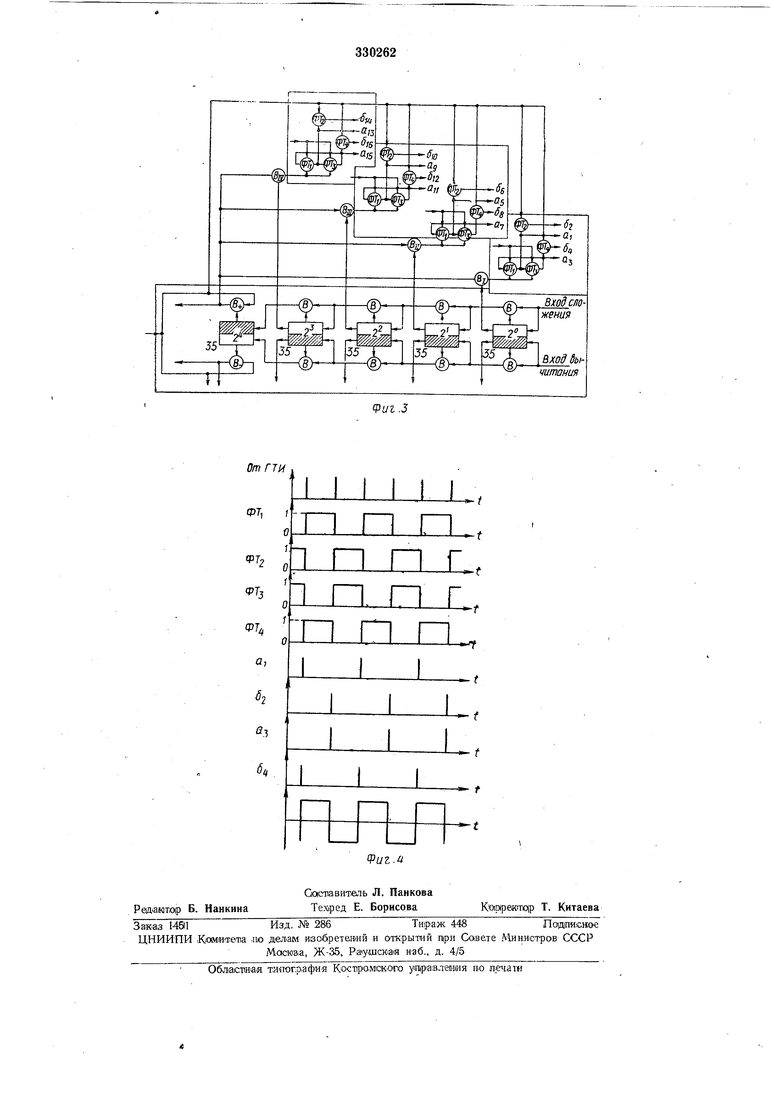
На фиг. 3 представлена схема реверсиви- о счетчика и схема блока цифрового преобразования сигнала, где: BI , Вп , , Siy- вентили открытия; В+, Ввентили; ФГь ФТ-, ФТ-.,,
ФT - ферротранзисторные модули: 55 -триггеры.
На фиг. 4 представлена циклограмма работы-ферротранзисторов блоков цифрового преобразования сигналов положительного или отрицательного направления и картина двИжения объемных дозаторов системы.
Импульсы программы блока программы / шосле синхронизации частотой синхронизации импульсов /li от генератора 12 тактовых импульсов поступают на один из входов (в зависимости от заданного направления) реверсивного счетчика 13. Кроме того, на вход реверсивного счетчика 13 поступают и.мпульсы обратной связи после синхронизации частотой синхронизации импульсов .4i от генератора 12 тактовых импульсов. Таким образом, число имиульсов, содержащееся в реверсивном счетчпке и, представляет собой ошибку системы в импульсной форме.
Сигнал ошибки, в зависимости от знака, вводится в блок 3 цифрового преобразования сигнала положительного направления, либо в блок 4 цифрового преобразования сигнала отрицательного направления. Кроме того, на входы блоков 5 и 4 подается тактовая частота Ь от генератора 12 тактовых импульсов.
Если ошибка системы (в соответствии с состоянием реверсивного счетчика) не превышает +2°, то импульсы тактовой частоты Б в определенной последовательности поступают на входные каналы а, 6i 02, 63 блоков управления 6 и 7 включением электромагнитов релейных золотников, электрогидравлического цифрового регулятора 8.
При ошибке системы +2 импульсы тактовой частоты Б попадают в определенной последовательности на входные каналы аз, бз, ОА, б блоков управления (з и 7.
Если ошибка системы равна +2, то импульсы тактовой частоты Б в определенной последовательности подаются на входы аз, о, «б, бъ блоков управления 6 и 7 включением электромагнитных релейных золотников.
Наконец, в случае увеличения ошибки до +2 импульсы тактовой частоты Б в определенной последовательности подаются на входные каналы а/, б, as, 6s.
Если ошибка равна некоторой двоичной комбинации, то импульсы тактовой частоты Б поступают на входы соответствуюш.ей комбинации блоков управления включением электромагнитов релейных золотников, связанных с разрядами реверсивного счетчика 13.
золотников, а при полол ительной - подключается группа блоков управления 6 включением электромагнитов релейных золотников. Работа тех или иных комбинаций блоков 6
либо 7 связана с необходимостью осуществлять регулирование скорости исполнительного цилиндра в зависимости от сигнала ошибки, т. е. в зависимости от состояния реверсивного счетчика 13. Электрогидравлический цифровой
регулятор 8 (см. фиг. 2) представляет собой совокупность блоков релейных золотников 23-30 с электромагнитным управлением, переключаемых в форсированном режиме для привода объемных дозаторов 15-22. Каждый золотник управляется двумя соответствлющими электромагнитами ЭМь ..., 9Mie или 3MS, 7 ЭМш блоков управления включением электромагнитов релейных золотников (соответственно 6 или 7). Например, при поступлении импульса на вход «i блока 6 - к электромагниту 3Mi соответствующего релейного золотника прикладывается высокое форсирующее напряжение, после чего золотник мгновенно перебрасывается в другое крайнее положение, а напряжение на электромагните ЭМ снижается до уровня поддержки. Далее при поступлении импульса на вход б блока управления включением электромагнитов релейных золотников напряжение с электромагнитов 3Mi снимается,
а к электромагнитам BMz того же золотника прикладывается высокое форсирующее напряжение, после чего золотник мгновенно возвращается в исходное положение, а напряжение на электромагните ЭМ2 снижается до уровня
поддержки.
Все золотники электрогидравлического цифрового регулятора 5 связаны с соответствующими блоками управления включением электромагнитов релейных золотников и работают
аналогично. Форсированное переключение золотников позволяет реализовать практически безынерционную связь электронной схемы управления исполнительным цили.ндром.
Выше отмечалось, что блоки релейных золотников 23-30 электрогидравлического цифрового регулятора 8 управляют объемными дозаторами 15-22, которые непосредственно осушествляют цифровое регулирование скорости гидравлического исполнительного цилиндра 14.
С помощью блока управления 5 переключением (фиг. 1) выполняется реверс исполнительного цилиндра. Так, если ошибка системы положительна, то импульсы тактовой частоты Б попадают на вход а блока 5, срабатывает
(с форсировкой) электромагнит ЗУИ релейного золотника направления 31, давление от насоса 32 подводится к правой полости исполнительного цилиндра (см. фиг. 1), а цифровое регулирование скорости осушествляется электрогидравлическим цифровым регулятором 8 на сливе из левой полости исполнительного цилиндра.
тывает (с форсировкой) электромагнит ЭМ релейного золотника направления 31, давление от насоса 32 подводится к левой полости исполнительного цилиндра, а цифровое регулирование скорости осуществляется электрогидравлическим цифровым регулятором 8 на сливе из правой полости гидроцилиндра.
Датчик исходного состояния предназначен для установки реверсивного счетчика 13 в нулевое состояние, для сброса ферротранзисторов блоков 3, 4, цифрового преобразования сигналов положительного и отрицательного направлений, для переброса всех золотников электрогидравлического цифрового регулятора S в исходное положение.
Электрогидравлический цифровой регулятор 8, основой с.хемы которого является комплекс блоков релейных золотников 23-30 с электромагнитным управлением и объемные дозаторы 15-22 с гидравлическим управлением, содержит четыре ячейки положительного направления, представляющие собой сочетание объемных дозаторов 19-22 с соответствующими блоками релейных золотников 27-30, и четыре ячейки отрицательного направления, представляющие собой сочетание объемных дозаторов 15-18 с соответствующими блоками релейных золотников 23-26, один релейный золотник направления 31. Релейный золотник направления подключает давление Яо от насоса 32 к той или иной полости исполнительного цилипдра, электрогидравлический цифровой регулятор осуществляет цифровое регулирование скорости исполнительного цилиндра на сливе.
Рассмотрим работу одной ячейки положительного направления, например, объемного дозатора 15 с блоком релейных золотников 23. Блоки релейных золотников представляют собой сочетание двух двухпозиционных двухкромочных золотников, переключаемых электромагнитами толкающего действия из одного крайнего положения в другое. В нормальном верхнем положении все рабочие щели релейных золотников 23 перекрыты, а полости соответствующего объемного дозатора 5 заперты. Общий ход каждого золотйика - около 1 мм, причем при каждом перебросе золотника состояние щелей изменяется на противоположное. Половина общего хода золотника приходится на открытие рабочих щелей, половина- на перекрытие. Таким образом, открытие и перекрытие рабочих щелей составляют величину порядка 0,5 мм. Предположим, что включен электромагнит ЭМ релейного золотника направления 31, давление от насоса 32 подается к .правой полости исполнительного цилиндра. Если золотники в блоках релейных золотников 23-26 или дозаторы 19-22 находятся в нормальном положении (верхнем), то левая полость гидроцилиндра заперта и его движение невозможно. Допустим теперь, что в некоторый момент времени включился электромагнит ЭМз (и выключился электромагнит ЭМ4) и связанный с ним релейный золотник мгновенно перебросился вниз. Левая полость исполнительноо цилиндра оказалась подключенной к верх-, ней полости соответствующего объемного дозаора, а нижняя полость дозатора соединилась со сливом 33. В результате поршень исполнительного цил1И1дра 14 переместился на величину, соответствующую объему дозы этого дозатора, а плунжер дозатора занял нижнее положение. Допустим далее, что в следующий момент времени {через один период тактовой частоты Б) включились электромагниты ЭМ и ЭМ (и выключились ЭМ2 и 3Mz). Левая полость гидроцилиндра оказалась подключенной к нижней полости этого же объемного дозатора, а верхняя полость дозатора соединилась со сливом. В результате порщень гидроцилиндра получил возможность сделать следующий шаг, величина которого соответствует объему дозы дозатора, а плунжер дозатора занял верхнее положение. Если и далее с каждым новым импульсом тактовой частоты Б золотники блока релейных золотников будут занимать новые и противоположные положения, то дозирование будет практически непрерывным, а скорость исполнительного цилиндра определится величиной дозы и тактовой частотой Б. Причем, как прямой, так и обратный ходы плунжера дозатора являются рабочими.
Из схемы на фиг. 2 видно, что четыре ячейки положительного направления 19, 27, 20, 28, 21, 29 и 22, 30 подключены параллельно к одной полости исполнительного цилиндра, и четыре ячейки отрицательного направления подключены параллельно к другой полости исполнительного цилиндра. Отдельные ячейки различаются полезными объемами дозаторов, которые соотносятся между собой как разряды двоичной системы счисления. Поэтому при работе объемного дозатора 20 скорость исполнительного цилиндра будет вдвое более высокой, при работе объемного дозатора 21 вчетверо более высокой, а при работе объемного дозатора 22 в восемь раз более высокой, чем при работе объемного дозатора 19. Отдельные ячейки могут работать как порознь, так и совместно в любой комбинации.
Если работает группа ячеек положительного направления, то все золотники релейных блоков отрицательного направления находятся в нормальном состоянии (включены электромагниты ЭЛГа, ЭМ, ЭМб, 5M8, 5М,о, ЗМЧг, ЭМи, ЭМЧб)- Работа ячеек отрицательного направления совершенно аналогична, однако должен быть включен электромагнит ЭМ релейного золотника направления 31 и давление от насоса 32 подается к левой полости исполнительного цилиндра 14.
Исходному состоянию реверсивного счетчика (фиг. 3) соответствует запоминание числа 16 (в этом состоянии счетчик изображен на фиг. 3). Если в реверсивном счетчике содержится число, равное или большее 16, то открыт вентиль В выхода импульсов тактовой частоты Б к блоку 3 цифрового преобразования сигнала положительного направления и входному
каналу а блока 5 управления переключением. Если в реверсивном счетчике содержится любое число, меньшее 16, то открыт вентиль Ввыхода импульсов тактовой частоты Б к блоку 4 цифрового преобразования сигнала отрицательного направления и входному каналу б блока управления переключением. Как отмечалось, при попадании тактовых импульсов Б на входной канал а блока 5 электрогидравлический цифровой регулятор 8 подключается к исполнительному цилиндру таким образом, что движение возможно лишь в положительном направлении. Соответственно, при попадании тактовых импульсов Б на вход б движение исполнительного цилиндра возможно лишь в отрицательном направлении.
Блок цифрового преобразования сигнала отрицательного или положительного направления представляет собой комбинацию вентилей и ферротранзисторных модулей, характер работы которых обусловлен состоянием реверсивного счетчика. Пусть, например, состояние счетчика 10001, т. е. положительное прирашение относительно исходного состояния составляет один импульс. Тогда откроется вентиль BI и работа ферротранзисторОБ, связанных с этим вентилем, будет подчиняться циклограмме на фиг. 4. Последовательное появление импульсов в каналах ai, б, «2. бз задаст четкую определенность в срабатывании электромагнитов ЭМ, ЭМ2, 9Mz, ЭM, а теоретическая картина движения дозатора приобретет вид последнего графика циклограммы на фиг. 4. В действительности, при правильном выборе тактовой частоты Б дозирование будет практически непрерывным. При этом скорость движения гидроцилиндра минимальна (в соответствии с мннимальным приращением реверсивного счетчика), поскольку полезный объе.м дозатора-- наименьший.
Если приращение реверсивного счетчика увеличится до двух импульсов (состояние 10010), то из группы вентилей В -Б iv открытым останется только вентиль В ц . Ферротранзисторы, связанные с этим вентилем, будут работать по циклограмме, аналогичной фиг. 4. Дозирование рабочей жидкости на сливе из гидроцилиндра осуществляет дозатор 20 и скорость вдвое превысит минимальную.
Нетрудно показать и далее, что скорость гидроцилиндра во столько раз превысит минимальную, каково приращение реверсивного счетчика относительно его исходного состояния.
Из структуры блока цифрового преобразования видно, что выход импульсов в каналы а-, связан с состоянием вентилей В, В} -5|у,
т. е. с состоянием реверсивного счетчика. В каналы б,--; 1 импульсы поступают с запаздыванием в один такт независимо от состояния реверсивного счетчика. Это сделано для того, чтобы золотники релейных блоков могли вернуться в нормальное состояние при изменении приращения счетчика в промежутках между тактами Б.
П р е д м е т н 3 о б р е т е н и я
Электрогидравлическая цифровая следящая система, содержащая блок программы, синхронизатор управляющих импульсов, генератор
тактовых импульсов, реверсивный счетчик, блок цифрового преобразования сигнала отрицательного направления, выполненный на ферротранзисторных модулях, блок цифрового преобразования сигнала положительного направления, выполненный на ферротранзисторных модулях, блок управления переключением, блоки управления включением электро.адагиитов релейных золотников, электрогидравлический цифровой регулятор, выполненный в виде
соединения блоков релейных золотников с объемными дозаторами, датчик исходного состояния и системы обратной связи, отличающаяся тем, что, с целью улучшения качества регулирования, выход каждого из п триггеров
реверсивного счетчика подключен к соответствующему вентилю открытия ферротранзисторных модулей, выход каждого из которых через соответствующий блок управления соединен со входами соответствующих электромагнитов,
связанных с соответствующими блоками релейных золотников, подключенных к объемным дозаторам, причем выходы блоков релейных золотников соединены с рабочими полостями исполнительного цилиндра.
Vuz.2
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНО-ИМПУЛЬСНА.Я СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292140A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU368418A1 |
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНАЯ СЛЕДЯЩАЯ | 1973 |
|
SU370376A1 |
| Электрогидравлическая цифровая следящая система | 1974 |
|
SU517005A1 |
| ГИДРАВЛИЧЕСКОЕ ЧАСТОТНО-ИМПУЛЬСНОЕ ПРИВОДНОЕУСТРОЙСТВО | 1971 |
|
SU322529A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ДОРОЖНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2130839C1 |
| Стенд для испытания блоков цилиндров двигателя внутреннего сгорания | 1988 |
|
SU1620877A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407082A1 |
| Устройство для автоматической стабилизации толщины полосы на прокатном стане | 1991 |
|
SU1784317A1 |