датчик 14 исходного состояния, служащий для подготовки системы к работе.
В корпусе электрогидравлического релейного блока W смонтированы два свободно ллавающих двухпозиционных трехкромочных золотни.ка 15 и 16, управляемых электромагнитами 17, 18, 19 и 20 толкающего действия. Нормальное положение обоих золотников соответствует верхнему их положению на чертеже, лри этом включены электромагниты 18 и 20. Каждый золотник имеет две нормально перекрытые рабочие щели (верхние «а чертеже) и одну но1рмально открытую рабочую щель. Величина общего хода золотника такова, что при открытии рабочих щелей устававливается режим насыщения по расходу, а При перекрытии происходит надежное запирание гидравлических магистралей. Половина общего хода приходится на открытие магистралей, половина - на лерекрытие.
Двоичный пятиразрядный счетчик 5 и блок б квантования по уровню положительного направления (фиг. 2) включают логическую схему ИЛИ 21, логические схемы И 22 и 23, вентили 24, 25 и 26.
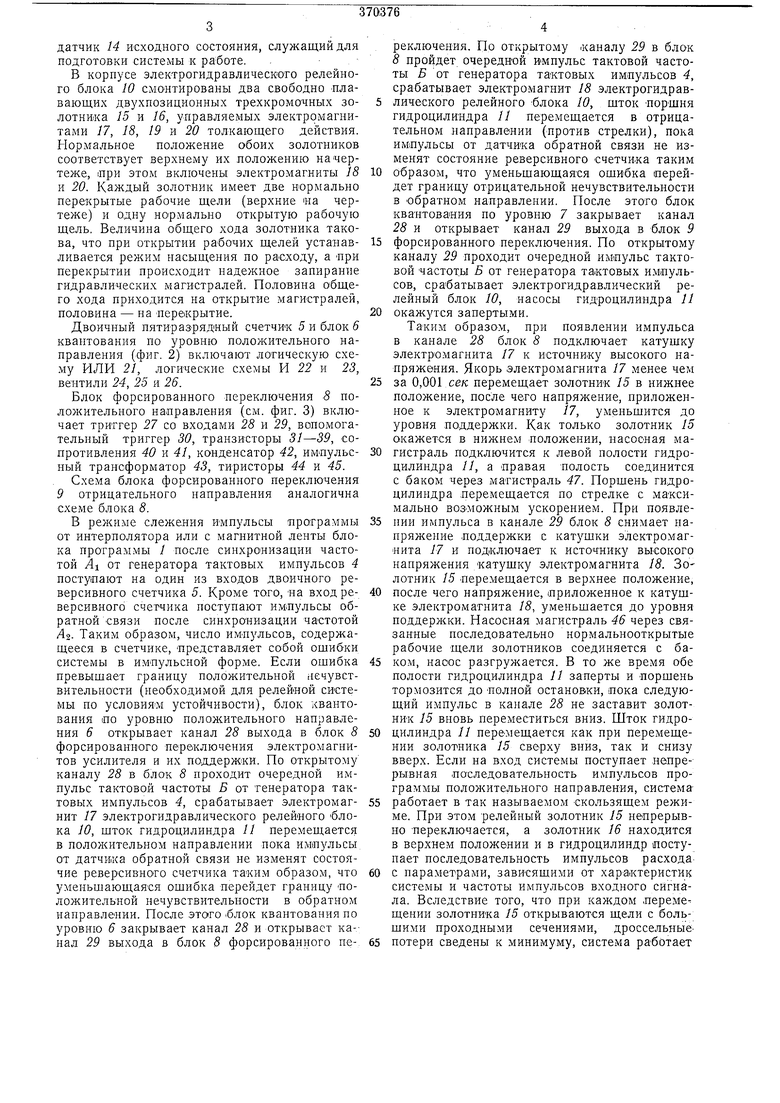
Блок форсированного переключения 8 положительного направления (см. фиг. 3) включает триггер 27 со входами 28 и 29, вспомогательный триггер 30, транзисторы 31-39, сопротивления 40 и 41, конденсатор 42, имлульсный трансформатор 43, тиристоры 44 и 45.
Схема блока форсированного переключения 9 отрицательного направления аналогична схеме блока 8.
В режиме слежения импульсы программы от интерполятора или с магнитной ленты блока программы / после синхронизации частотой AI от генератора тактовых импульсов 4 поступают на один из входов двоичного реверсивного счетчика 5. Кроме того, на вход реверсивного счетчика поступают имлульсы обратной связи иосле синхронизации частотой До. Таким образом, число имлульсов, содержащееся в счетчике, представляет собой ошибки системы в импульсной форме. Если ошибка превышает границу положительной нечувствительности (необходимой для релейной системы по условияМ устойчивости), блок квантования 1ПО уровню положительного направления 6 открывает канал 28 выхода в блок 8 форсированного переключения электромагнитов усилителя и их поддержа и. По открытому каналу 28 в блок 8 проходит очередной импульс тактовой частоты Б от генератора тактовых импульсов 4, срабатывает электромагнит 17 электрогидравлического релейного блока 10, шток гидроцилиндра 11 перемещается в полон ительном направлении пока импульсы от датчика обратной связи не изменят состоячие реверсивного счетчика таким образом, что уменьшающаяся ошибка перейдет границу положительной нечувствительности в обратном направлении. После этого .блок квантования по уровню 6 закрывает канал 28 и открывает ка-нал 29 выхода в блок 8 форсированного переключения. По открытому «аналу 29 в блок 8 пройдет очередной Импульс тактовой частоты Б от генератора тактовых импульсов 4, срабатывает электромагнит 18 электрогидравлического релейного -блока 10, шток поршня гидроцилиндра 11 перемещается в отрицательном направлении (против стрелки), пока им-лульсы от датчика обратной связи не изменят состояние реверсивного счетчи.ка таким образом, что уменьщающаяся ощибка перейдет границу отрицательной нечувствительности в обратном направлении. После этого блок квантования по уровню 7 закрывает канал 28 и открывает канал 29 выхода в блок 9 форсированного переключения. По открытому каналу 29 проходит очередной импульс тактовой частоты Б от генератора тактовых импульсов, срабатывает электрогидравлический релейный блок 10, насосы гидроцилиндра // окажутся запертыми.
Таким образом, при появлении импульса в канале 28 блок 8 подключает катущку электромагнита /7 к источнику высокого напряжения. Якорь электромагнита 17 менее чем за 0,001 сек перемещает золотник 15 в нижнее положение, после чего напряжение, приложенное к электромагниту 17, уменьшится до уровня лоддерл ;ки. Как только золотник 15 окажется в нижнем положении, насосная магистраль подключится к левой полости гидроцилиндра 11, а правая полость соединится с баком через магистраль 47. Поршень гидроцилиндра перемещается по стрелке с максимально воЗМожным ускорением. При появлении импульса в канале 29 блок 8 снимает папряжение поддержки с катушки электромагнита 17 и подключает к источнику высокого напряжения катушку электромагнита 18. Золотник 15 перемещается в верхнее положение, после чего напряжение, приложенное к катушке электромагнита 18, уменьшается до уровня поддержки. Пасосная магистраль 46 через связанные последовательно нормальнооткрытые рабочие щели золотников соединяется с баком, насос разгружается. В то же время обе полости гидроцилиндра // заперты и -поршень тормозится до -полной остановки, пока следующий импульс в канале 28 не заставит золотни-к 15 вновь переместиться вниз. Шток гидроцилиндра 11 перемещается как при перемещении золотника 15 сверху вниз, так и снизу вверх. Если на вход системы поступает непрерывная по-следовательность импульсов программы положительного направления, система работает в так называемом -скользящем режиме. При этом релейный золотник 15 непрерывно переключается, а золотник 16 находится в верхнем положении и в гидроцилиндр поступает последовательность импульсов расхода с параметрами, зависящими от характеристик системы и частоты импульсов входного сигнала. Вследствие того, что при каждом перемещении золотника 15 открываются щели с большими проходными сечениями, дроссельныепотери сведены к минимуму, система работает
в режиме насыщения по расходу. Большая скорость перемещения золотника обеолечивает открытие или закрытие каналов подачи ж-идкости сразу же после лолучения командного импульса, в результате создается практически безынерционная связь электронной системы управления с гидравлической исполнительной частью.
Работа системы при подаче управляющих импульсов на вход блока 9 аналогична, при этом управляющий импульс в канале 28 вызывает перемещение ПОршня гидроцилиндра 1 против стрелки.
Исходному состоянию счетчика 5 (см. фиг. 2) соответствует запоминание числа 15 (состояние 01111) и числа 16 (состояние 10000), при это.м релейная следящая система находится внутри зоны нечувствительности и управляющих команд к исполнительному двигателю не подается. Если число и.мпульсов на входе в счетчик превышает 16, подается ко-манда на движение в положительном направлении; если число импульсов меньше 15, подается команда на движение в отрицательном направлении. Те или иные команды в зависимости от состояния счетчика подаются блоком квантования по уровню. Логическая схема И 22 срабатывает лри любом состоянии реверсивного счетчика, превышающем 10000 (т. е. число 16). При ЭТО.М открывается вентиль 24 выхода тактовых импульсов частоты Б Б канале 28 к блоку 8, что приводит к включению электромагнита 17 после появления первого же импульса, и система приходит в движение. Как только состояние счетчика возвращается в пределы зоны чувствительности (состояние 10000), схема И 22 перестанет поддерживать открытым вентиль 24, срабатывает схема И 23 и открывается вентиль 25 выхода тактовых импульсов частоты Б в канал 29 к блоку 9. В результате после появления первого же импульса в канале 29 выключается .электромагнит 17 и включается электромагнит 18, система останавливается. .
Блок квантования по уровню отрицательного направления 7 построен аналогично.
Входным элементом блока управления 8 включением электромагнитов является триггер 27 с двумя входами 28 и 29. При подаче на вход 28 очередного «открывающего импульса
транзистор 32 закрывается и с нагрузки 40 снимается напряжение источника, которое через сопротивление 41 прикладывается к базе транзистора поддержки 33. Последний отпирается одновременно, но давая сигнал на открытие транзистора 34 запуска тиристора 44. При открытии транзистора 33 через катуш.ку электромагнита 17 протекает ток поддержки по цепи (О в) - (30 в). Открывшийся тиристор 44 образ ет цепь заряда конденсатора 42 : (+300 в) - (-300 в), тем самым задавая форсировочное ускорение электромагниту 17. По окончании заряда конденсатора 42 тиристор 44 запирается. Поддерживаемый триггером в открытом состоянии транзистор поддержки 33 обеспечивает прохождения тока поддержки по катушке электромагнита 17 до прихода «аакрывающего импульса на вход 29 блока управления. Одновременно с открытием тиристора 44 с обмотки импульсного трансформатора 43 подается сигнал управления на вспомогательный триггер 30, который запирает транзистор поддержки 37 электромагнита 18 на все время включения поддержки электромагнита 17. При подаче «выключающего импульса на вход 29 открываются транзисторы 32, 36, 38, 37 и тиристор 45. Остальные элементы схемы заперты. Через катушку электромагнита 18 пропускается мощ30 ный импульс тока и включается ток поддержки. Импульс создается при разряде конденсатора 42, что подготавливает емкость для ново го заряда при поступлении последующего и пульса на вход 28.
35т-т
Предмет изобретения
Элбктрогидравлическая релейная следящая система, с блоком сравнения и прямой цепью управления гидродвигателем, например, для
40 станков с числовым программным управлением, отличающаяся тем, что, с целью улучщения ее динамических характеристик, прямая цепь выполнена в Виде цифрового блока квантования подуровню с управляющими сигналами в импульсной форме и выходами полпжительного и отрицательного направлений, а такл{е выходами включения и выключения расхода, подключенными к блОКу форсированного переключения электромагнитов усилителя их 50 поддержки.