1
Изобретение относится к области аналоговой вычислительной техники.
В известных устройствах для моделирования синхронных машин воспроизведение режимов работ синхронной машины осушествляется без учета постоянной времени в поперечной оси машины, хотя эта постоянная значительна и может существенно влиять на результаты расчетов. Известны схемы моделирования синхронных машин путем воспроизведения контуров в продольной и поперечной осях. Машины хотя и учитывают постоянную времени в обеих осях, но приводят к сложным решениям и кро-ме того, не дают возможности останавливать переходной процесс.
Предложенное устройство позволяет учесть постоянную времени в поперечной оси машины иным путем, позволяющим останавливать переходной процесс для записи режима и продолжить его без искажения результатов.
В известном устройстве уравнение движения ротора синхронной машины воспроизводится с помощью двух индукционных систем, причем на ротор одной из них действуют два противоположно направленных вращающих момента, создающих вредное боковое давление на ось, увеличивающее трение и уменьщающее чувствительность. Кроме того, в известных устройствах уменьшена чувствительность и неравномерность нагрева диска магнитным полем. В
результате необходимо дополнительно применять ферродинамические приборы специального изготовления. В предложенном устройстве вместо сложных
ферродинамических приборов специального изготовления могут быть использованы обычные индукционные системы с вращающимся полем, роторы которых объединяются общей осью. В качестве таких систем могут быть использованы, например, тахогенераторы серийного изготовления.
Предлагаемое устройство имеет большое быстродействие воспроизведения переходных электромеханических процессов, повышенную
чувствительность, большую простоту изготовления и учитывает постоянную времени в поперечной оси синхронной машины.
Предлагаемое устройство отличается тем, что содержит электромеханические интеграторы, каждый из которых выполнен в виде двух индукционных блоков. Ротор первого электромеханического интегратора механически связан с ползунком первого потенциометра. Обмотки первого электромеханического интегратора соединены с выходом устройства и с источником питания. Первый потенциометр через первый усилитель подключен к обмотке второго электромеханического интегратора, ротор которого механически связан с ротором
фазовращателя, соединенного через второй
3
усилитель I второй и третий потенциометры с услмителсм люпиюстн, выход которого соедииен с катушкой индуктивности, Параллельно второму потенциометру включена фазосдвигающая цепочка кз конденсатора и резистора, к общей точке которых подключен четвертый потенциометр, ползунок которого механически связан с индукицонным блоком, одна из обмоток которого соединена с выходом второго усилителя, другая - с выходом третьего усилителя.
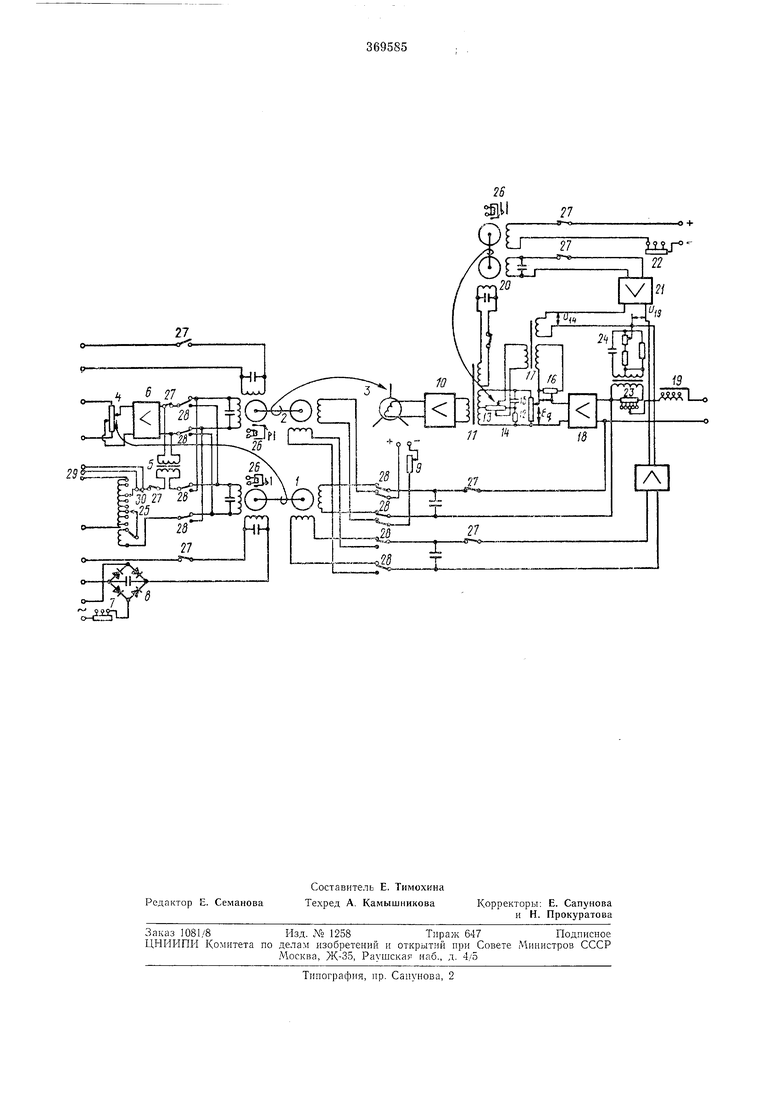
На чертеже представлена схема предлагаемого устройства.
Устройство состоит из двух последовательно включенных электромеханических интеграторов 1 Я 2, которые управляют вращением фазовращателя 3, в качестве которого может быть использован, например, сельсин, статор которого обтекается трехфазным током.
Интегратор 1, который одновременно является сумматором двух вращающих моментов, состоит из двух индукциоппых блоков, роторы которых имеют ось, механически связанную с потенциометром 4 с помощью редуктора. К одному из индукционных блоков - задающему подается напряжение от независимого источника тока и, таким образом, создается вращающий момент, пропорциональный .ю цпости развиваемой турбиной, а к другому - следующему подается панряжение и ток выходной цепи модели и создается вращающий момент, направленный навстречу первому и прспорциональпый мон;ности, отдаваемой reienaTOpOM.
При возникновении небаланса вращающих моментов HieTKH нотенциометра 4, механически связанные с осью роторов индукционной системы, отклоняется от нейтрального положения, и в цепи одной из обмоток интегратора 2, аналогичного интегратору /, возникает ток, и ротор этого интегратора начнет вращаться, увлекая за собой ротор фазовращателя 3, с которым он связан механически.
Очевидно, что при возникновении небаланса моментов напряжение Ui,, снимаемое с нотенциометра 4, будет определяться уравнением
л Л(Яслед-Язад)А
а фаза ротора сельсина изменяется в соответствни с уравнением
8 , J и, dt К, } (Яелед - /зад) dt,
где Рслед. Яг - МОЩНОСТЬ, отдаваемая генератором;
РВ-ЛЦ PI - мощность, создаваемая турбиной;t - время;
1, 2, 3 - коэффициенты пропорциональности.
После дифференцирования этих уравнений и приравнивая результирующего коэффициента пропорциональности /Срез инерции агрегата
ГУ получается уравнение движения ротора синхронной машины:
Г„
РТ - Фг ДЯ.
dt
Для того, чтобы переходный процесс, воспронзводимый моделью, был затухающий в цепь задающей системы интегратора / включена вторичная обмотка трансформатора 5, а его первичная обмотка включена на выход усилителя 6, нанряжение которого пропорционально относительной скорости ротора моделируемой синхронной машины, т. е.
с/.. /с
Изменяя коэффициент трансформации, можно устанавливать желаемое значение коэффициента К и получить уравнение затухающих колебаний:
г df dt
Для .менения постоянной инерции Ту глужит реостат 7 и выпрямительный мост 8, с помощью которых изменяется напряжение ностоянного тока, вводимое в цепь одной из обмоток нервого интегратора.
Изменять постоянную ннерции можно также с помощью реостата 9, который изменяет величину ностоянного тока, нронускаемого через обмотку инд)кционной системы, для изменения скорости враш,ения ее роторов.
Наи;)яжение с ротора фазовран ателя 3 подается через усилитель 10 на трансформатор //, имеющий две вторичные обмотки. Одна из обмоток включена на потенциометр 12, с помощью которого устанавливается напряжение,
пропорциональное э.д.м. Е ,, синхронной мапиипы, а с помощью потепциометра 13, включенного через фазосдвигающую цепочку 14 и 15, и потенциометра 16, включенного через трансформатор 17, устанавливается напряжение,
равное Iq (Хд-ха), сдвинутое на 90 но отнощению к э.д.с. Eq. Сумма этих двух напряжений, равная Е , подается через усилитель мощности 18 на индуктивное сонротивление 19, воспроизводящее продольную переходную реактивность синхронной машины. Для управления величиной Iq (Хд-xd) с учетом постоянной времени контура в поперечной оси машины служит индукционный блок 20, с помощью которого перемещаются щетки нотенциометра
13. При этом, во-первых, изменяется величина fq (Xq-xd) и, во-вторых, напряжение t/is, подаваемое с трансформатора 17 на вход усилителя 21. Усилитель 21 с помощью фазосдвигающей
цепочки на его входе (не показанной на схеме) настраивается таким образом, чтобы при токе /5 0 и напряжении, снимаемом с нотенциометра 13, также равном нулю, вращающий момент индукционного блока 20 равнялся бы
нулю.
В этом случае при возникновении в выходной цепи модели тока (т. е. проекции тока / на ось q) ротор индукционного блока начнет двигаться, увлекая за собой щетку потенциометра 13. Это движение будет продолжаться до тех нор, иска напряжение f/i/, станет равным противоположно направленной слагающей напряжения , определяемой током Iq выходной цепи модели синхронной машины.
Напряжение, снимаемое с потенциометра 13 и, следовательно, напряжение /, (Xq-xd) будет меняться по экспоненте с постоянной времени, которую можно изменять, меняя с помощью реостата 22 ток в цепи блока 20.
Для установки заданной номинальной мощности моделируемой синхронной машины служат сопротивления 23 (для установки) и 24 (для точной установки).
Для изменения коэффициента загрузки синхронной машины служит автотрансформатор 25, коэффициент трансформации которого грубо и точно можно изменять с помощью переключателей.
Остановка процесса осуществлятся с помощью электромагнитов 26, тормозящих индукционные системы и одновременно прерывающих ток в обмотках индукционных систем с помощью контактов 27.
При нарушении режима новое установившееся состояние наступает после нескольких колебаний ротора синхронной мащины. Для того, чтобы ускорить установку режима можно либо увеличить демпфирование качаний путем увеличения напряжения, снимаемого с трансформатора 25, или взаимно переключить обмотки интеграторов с помощью переключателей 28. В последнем случае процесс установки режима будет апериодическим.
Для учета действия регулятора скорости предус.мотрены клеммы 29, через которые молсет вводиться напряжение от модели регулятора скорости. В этом случае контакт 30 размыкается.
Предмет изобретения
Устройство для моделирования синхронной
машины, содержащее потенциометры, индукционные блоки, фазовращатели, усилители, фазосдвигающую цепочку и источники питания, отличающееся тем, что, с целью повышения быстродействия и точности устройства, а
также упрощения его конструкции, оно содержит электромеханические интеграторы, каждый нз которых выполнен в виде двух индукционных блоков, ротор первого электромеханического интегратора механически связан с
ползунком первого потенциометра, причем обмотки первого электромеханического интегратора соединены с выходом устройства и с источником питания, а первый потенциометр через первый усилитель подключен к обмотке
второго электромеханического интегратора, ротор которого механически связан с ротором фазовращателя, соединенного через второй усилитель и второй и третий потенциометры с усилителем мощности, выход которого соединен с катушкой индуктивности, параллельно второму потенциометру включена фазосдвигающая цепочка из конденсатора и резистора, к общей точке которых подключен четвертый потенциометр, ползунок которого механически
связан с индукционным блоком, одна из обмоток которого соединена с выходом второго усилителя, другая - с выходом третьего усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ УПРАВЛЯЕМОГОРЕАКТОРА | 1969 |
|
SU252735A1 |
| АВТОМАТИЧЕСКАЯ МОДЕЛЬ СИНХРОННОГО ГЕНЕРАТОРА | 1954 |
|
SU106349A1 |
| Устройство для моделирования синхронной машины | 1975 |
|
SU527717A2 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ СИНХРОННОЙМАШИНЫ | 1971 |
|
SU317078A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ СИНХРОННОГОГЕНЕРАТОРА | 1969 |
|
SU238901A1 |
| Устройство для моделирования энергосистем | 1978 |
|
SU763923A1 |
| ИНФРАНИЗКОЧАСТОТНЫЙ АНАЛИЗАТОР ПЕРЕДАТОЧНЫХФУНКЦИЙ | 1965 |
|
SU174805A1 |
| Устройство для автоматического решения систем дифференциальных уравнений с комплексными коэффициентами | 1947 |
|
SU75410A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ КОМПЕНСАТОРА РЕАКТИВНОЙ МОЩНОСТИ | 1970 |
|
SU259494A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2025037C1 |