1
Изобретение относится к области ионнооптических систем.
Известны различные конструкции устройст1В, применяемых для коллимирован я пучков ускоренных частиц. Коллимирование обычйо производится двумя коллиматорами-вертикальным и горизонтальным с .плоско-параллельным перем ещением щек. Поэтому предпочтительна универсальная конструкция, которая Позволяет осуществлять коллимИрование лучков заряжениых частиц как в вертикальной плоскости, так « в горизонтальной.
Для коллимации высокоэнергетич.ных пучков необходимо применять щеки (блоки) значительной ДЛИ1НЫ и сечения. Вес каждой щеки достигает 200-250 кг. В известных конструкциях коллиматоров щеки размещены в прямоугольной камере и перемещаются по четырем цилиндрическим направляющим со специальными подшипниками при помощи неза1висимых приводов. Натравляющие закреплены на стенках вакуумной камеры. Перемещая щеКИ iHO направляющим, можно получить щель любой щирииы в заданных пределах. Для создания требующегося угла наклона рабочей поверхности щеки для заданной рабоЧ1ей точки коллиматора (заданного расстояния от мищени до коллиматора и угла между щеками) применяются сменные клинья, которые закрепляются на щеках.
Изменение угла -наклона щек производится сменой клиньев, для чего требуется частичная разборка коллиматора и, следовательно, значительное время, особенно учитывая высокую
остаточную радиоактивность деталей коллиматора, необходимость напуска атмосферы в ионОПровод и последующей вакуумной откачки. Точность положения щ-ек зависит от жесткости вакуумной камеры, так как направляющие закреплены на ее стенках. Это требует увеличения толщины стенок камеры, и, следовательно, ее веса.
Кроме того, необходимость изготовления специальных подщипников и подгонки к ним
направляющих с точностью, обеспеч-ивающен безлюфтовые посадки, исключает взаимозаменяемость деталей в известных конструкциях.
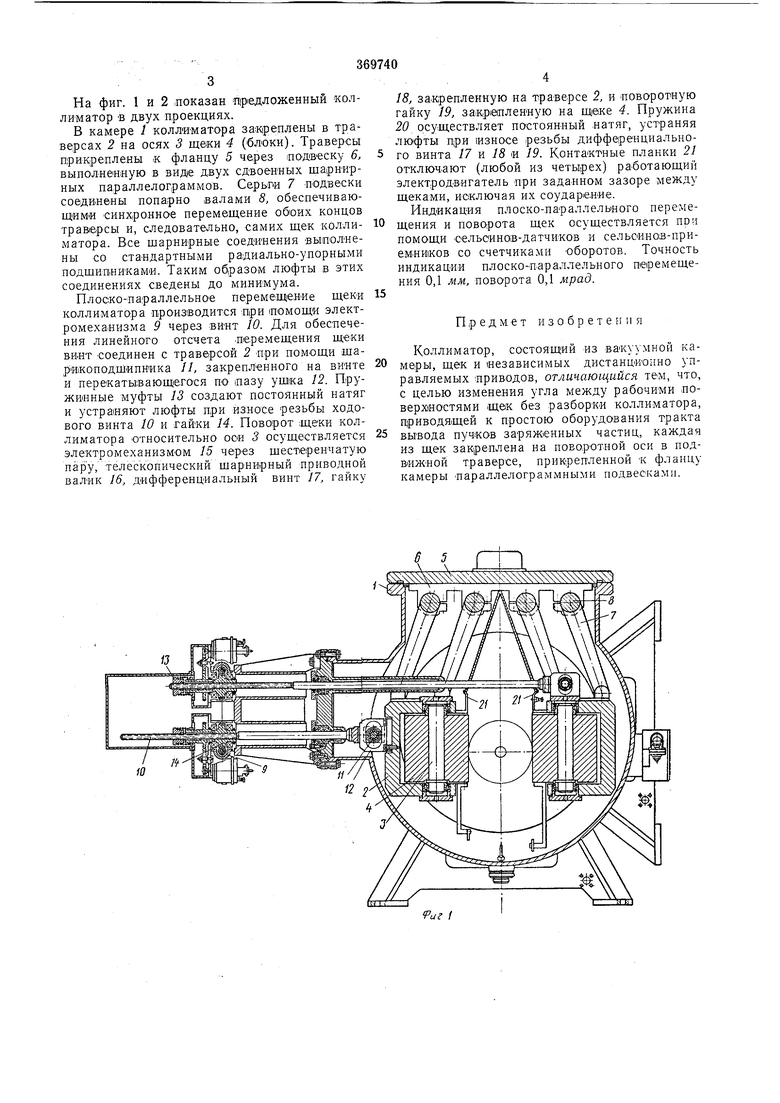
В предлагаемой конструкции коллиматора возвратно-поступательное движение щек заменено колебательным. Создание угла наклона щек осуществляется поворотом самих щек (блоков) коллиматора при помощи дистанционно управляемых мехавизмов, что устраняет потребность разборки коллиматора для регулировки углового положения щек и во много раз сокращает требуемое для таких регулировок время, в течение которого простапвает дорогостоящее оборудование тракта пучков. На фиг. 1 и 2 показан предложенный коллиматор в двух проекциях. В камере 1 коллиматора за:К|реплены в траве;рсах 2 на осях 3 щеки 4 (блоки). Траверсы прик;реплены .к фланцу 5 через подвеску 6, выполненную в виде двух сдвоенных шарнирных параллелограммов. Серьги 7 подвески соединены попарно валами 5, обеспечивающими синхронное перемещение обоих концов трав(ерсы и, следовательно, самих щек коллиматора. Все шарнирные соедянения выполнены со стандартными радиально-упорными подшипниками. Таким образом люфты в этих соединениях сведены до . Плоско-параллельнОе перемещение щеки коллиматора производится при томощи электромеханизма 9 через винт 10. Для обеспечения линейного отсчета -перемещения ще«и виат соединен с траверсой 2 -при помощи шарякоподЩИпНика 11, закрепленного на винте и перекатывающегося по пазу ушка 12. Пружинные муфты 13 создают постоянный натяг и устраняют люфты при износе -резьбы ходового винта 10 и гайки 14. Поворот щеки коллиматора относительно оси 3 осуществляется электромеханизмом 15 через шестеренчатую пару, телескопический шарнирный приводной валик 16, дифференциальный винт 17, гайку 18, зажрепленную на траверсе 2, и поворотную гайку 19, закрепленную на щеке 4. Пружина 20 осуществляет постоянный натяг, устраняя люфты дри износе резьбы диффе ренциального винта 17 и 18 и 19. Контактные планки 21 отключ-ают (любой из четырех) работающий электродвигатель при заданном зазоре между щеками, исключая их соударение. Индикация плоско-параллельного перемещения и поворота щек осуществляется пои помощи сельсинов-датчиков и сельоинов-приемпиков со счетчиками оборотов. Точность индикации плоско-параллельного перемещения 0,1 мм, поворота 0,1 мрад. Предмет изобретения Коллиматор, состоящий из вакуумной камеры, щек и независимых дистанционно управляемых приводов, отличающийся тем, что, с целью изменения угла между рабочими поверх1ностями щек без разборки коллиматора, щриБОДящей к простою оборудования тракта вывода пучков заряженных частиц, каждая из щек закреплена на поворотной оси в подВижной траверсе, прикрепленной к фланцу камеры параллелограммными подвесками.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ПАРАМЕТРОВ ПОТОКА ЭЛЕКТРОНОВ | 1991 |
|
RU2009526C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ПРИ ЕГО ДОСТАВКЕ НА ОБЪЕКТ, ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ УПРАВЛЕНИЯ ЛАЗЕРНОЙ СИСТЕМОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ЛАЗЕРНОЙ СИСТЕМОЙ | 2006 |
|
RU2326478C2 |
| ОПТИКО-МЕХАНИЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU422976A1 |
| ВЫСОКОТЕМПЕРАТУРНАЯ РЕНТГЕНОВСКАЯ КАМЕРА | 1972 |
|
SU420918A1 |
| Подвеска грузонесущего конвейера для сборки радиаторов | 1983 |
|
SU1154162A1 |
| Установка для горячего прессования | 1983 |
|
SU1199450A1 |
| Коллиматор рентгеновских лучей | 1972 |
|
SU505029A1 |
| КОНСТРУКЦИЯ МНОГОЭЛЕКТРОДНОГО ПАКЕТА | 2014 |
|
RU2621290C1 |
| Коллиматор пучков заряженных частиц | 1975 |
|
SU536738A1 |
| Временный зажим для подвески обожженного анода | 1985 |
|
SU1310455A1 |

