Изобретение относится к области текстильного машиностроения.
Известны устройства для регулирования скорости намотки, содержащие датчики оборотов и регуляторы угловой скорости, работающие по принципу следящей системы.
Однако такие устройства не позволяют осуществлять намотку свежесформованной синтетической нити малой толщины на высокой скорости.
Цель изобретения - возможность наматывания свежесформованной синтетической нити на высоких скоростях при индивидуальном регулировании.
Для этого в предложенном устройстве применено специализированное вычислительное устройство, управляющее бесфрикционным приводом путем регулирования скорости намотки нити в функции диаметра на.моткн.
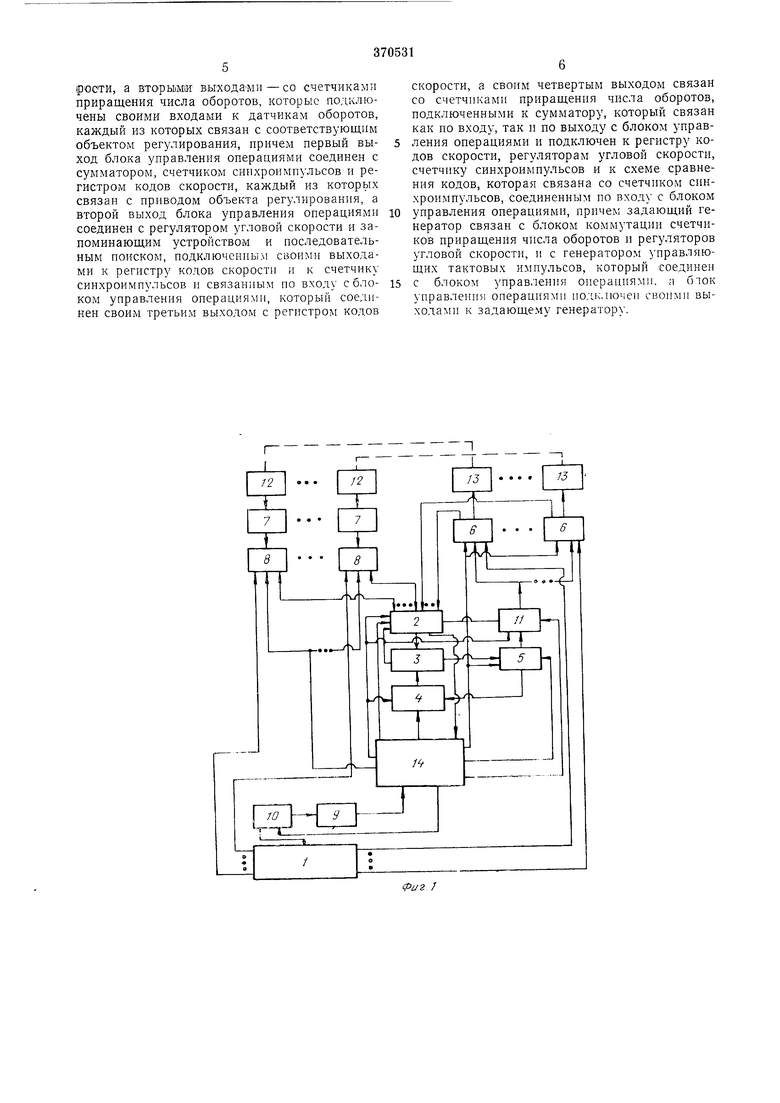
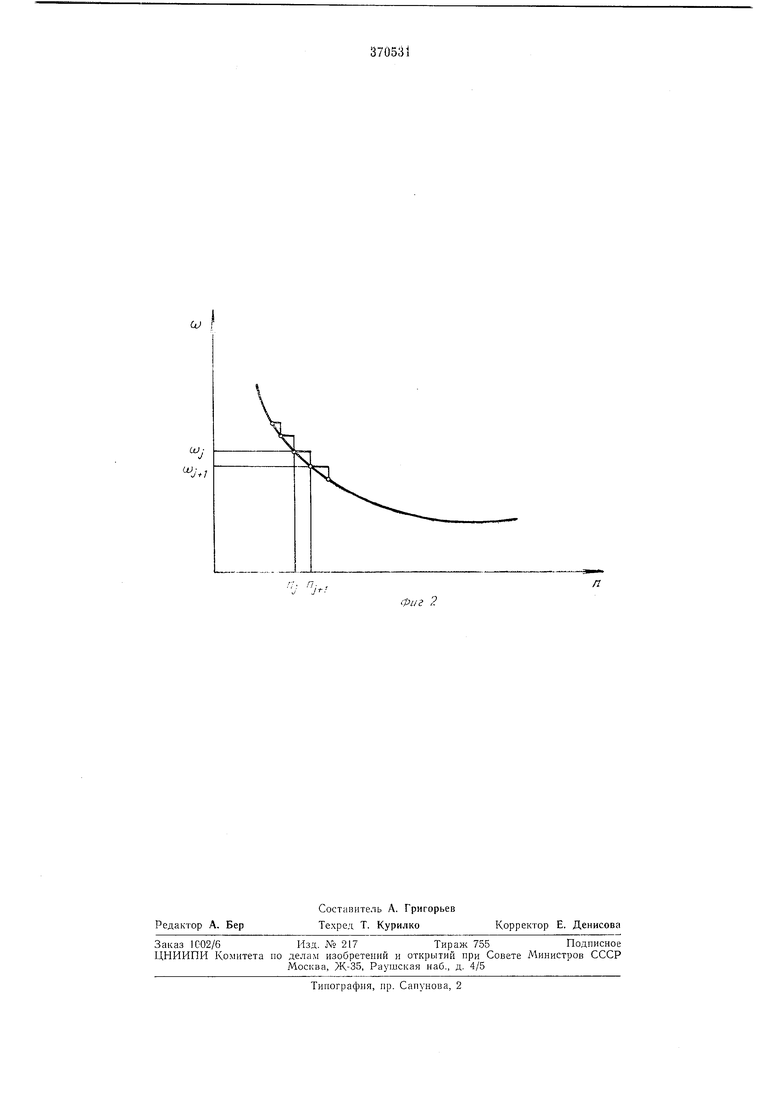
На фиг. 1 показана блок-схема описываемого устройства для регулирования скорости намютки; на флг. функции изменения угловой скорости в зависимости от накопленного числа оборотов.
Описываемое устройство содержит блок 1 коммутации счетчиков приращения числа оборотов и регуляторов угловой скорости; сумматор 2 для суммирования чисел оборотов, накопленных на предыдущих циклах; схему сравнения 3, предназначенную для сравнения ко2
ДОв чисел оборотов на сум.матОре п на счетчике синхроимпульсов; счетчик 4 сн1 хр011мпульсов для подсчета синхронпзнрующ х пмпульсов, считываемых с носителя памятн запоминающим устройством с последовательным поиском; запоминающее устройство 5 с последовательным noiiCKOM для записи н считывания с носителя информации кодов угловой скорости в функцпп чисел оборотов; регуляторы 6 УГЛОВОЙ скорости: ДЛЯ отр.аботки- управляющего воздействия (регулирования скорости намотки), содержащее преобразователь код-аналог-код; датчики 7 оборотов, связанные с бобинодержателямп (числом намотки) н вырабатывающие на каждом обороте однн импульс; счетчики 8 приращения чнсла оборотов за цикл, предназначенные для подсчета чнсла оборотов соверщенных каждым бобпнодержателем за время одного цикла; генератор 9 управляющих тактовых импульсов; задающий генератор 10 для задания командных импульсов перехода с одного объекта регулирования на другой;,регистр 11 скорости для промежуточной записи кодов, считываемых запоминающим устройством с последовательным поиском; объект 12 регулирования (тело намотки); привод 13 объекта регулирования; блок 14 управления oпepaцlIя пI для управления работой устройства «а цикл е « потактно представляет собой логическую
схему 1на iipHrrepax и вентилях, улра;вля1Ющую блоками уот,рой|ства для реализации
функций реГуЛ.ИрОВа1Н:ИЯ :C«0;piOlCTH.
Устройство работает следующим образом.
В запоминающее устройство 5 закладывается кольцо носителя памяти, па котором заппсан т-разрядным кодом (где т - число разрядов, определяемое типом носителя и требуемой точностью) график квантуемой функции (см. фиг. 2).
Шаг квантования определяется в зависимости от требуемой точности регулирования угловой скорости.
При записи на носитель программы регулирования, соответствующей заданной функции, последовательность строк на носителе соответствует последовательности дискретных щагов изменения числа оборотов я, причем каждому значению п соответствует одно значение скорости coj и на носителе это значение записано на /-той строке, где / - порядковый номер дискретного шага квантования и соответствующее ему число синхроимпульсов.
Движение носителя ,в устройстве 5 непрерывно. Задающий генератор 10 выдает командные импульсы на блок 1, который подключает счетчики 8 и регуляторы 6 последовательно по каждому объекту регулирования.
Работа описываемого устройства на f-том цикле.
После подключения к /С-тому счетчику 8 (где К - номер объекта регулирования) и к К-тоиу регулятору 6 генератор 9 вырабатывает серию (пачку) управляющих тактовых импульсов, которая поступает на блок 14 управления операциями.
Управляющие импульсы с блока 14 выдаются последовательно во времени по мере поступления тактовых импульсов генератора 9.
По первому управляющему импульсу блока 14 устанавливаются в нуль сумматор 2, регистр // и счетчик 4 синхроимпульсов.
По второму управляющему импульсу из регулятора 6 переносится величина скорости в сумматор 2, а также переносится код считанпой на данном шаге строки блока 5 в регистр 11.
По третьему управляющему импульсу выполняется перенос кода из регистра 11 в сумматор 2.
По четвертому управляющему импульсу производится сравнение путем вычитания из кода, записанного в сумматор 2 (из регулятора 5), кода из регистра 11.
Если сумматор 2 после вычитапия содержит число, не равное нулю, выполняются следующие операции: по пятому импульсу -установка нуля в сумматоре 2 и регистре 11, а затем повторение операции по второму, третьему и четвертому управляющим импульсам при считывании блоком 5 следующей кодовой строки. Так повторяется до тех пор, пока прп сравнении в сумматоре 2 не окажется нуль.
Тогда, начиная с пятого управляющего импульса, выполняются следующие операции.
По пятому управляющему импульсу выполняется запрет восстановления величины скорости из регулятора 6 в сумматор 2, а также запрет переноса синхроимпульсов из блока 5 в счетчик 4, т. е. в счетчике 4 оказывается записанным число оборотов, соответствующее значению скорости, являвшееся управляющим воздействием регулятора на рассматриваемом I-TOM цикле.
По шестому управляющему импульсу выполняется перенос кода из счетчика 4 в сумматор 2.
По седьмому управляющему импульсу осуществляется установка нуля в счетчике 4 и перенос кода из счетчика 8 в сумматор 2.
Затем по восьмому управляющему импульсу выполняется сложение кодов, записанных в сумматор 2 из счетчика 4 и счетчика 8 и разрешение переноса синхроимпульсов из блока 5 в счетчик 4.
По девятому импульсу выполняется команда сравнения на схеме сравнения 3 кода, полученного после алгебраического сложения в сумматоре 2, с кодом в счетчике 4, получаемом при считывании синхроимпульсов из блока 5.
Сравнение указанных кодов выполняется до тех пор, пока они не окажутся равными, после чего разрешается считывание соответствующей кодовой строки с носителя памяти блока 5 и запись этой строки через регистр 1 в регулятор 6, который таким образом, получает новые значения управляющего воздействия и начинает отрабатывать его, регулируя скорость привода 13, т. е. объект регулирования -наЧ1И1на1ет «ращатм я с новой скоростью.
После этого следующим командным импульсом генератора 10 осуществляется переход к новому (/С+1)-му объекту 12 регулирования и затем повторяется серия тактовых импульсов генератора 9 и так далее пока не будет осуществлен опрос всех объектов регулирования и ироиеведбно соответствующее подрегулирование скорости каждого.
После этого начинается новый цикл последовательного опроса объектов регулирования.
Предмет изобретения
Устройство для регулирования скорости наMOTKMi, содержащее датчи ки iOi6opOTOiB, регуляторы угловой скорости, отличающееся тем, что, с целью повыщения точности регулирования скорости намотки, оно снабжено вычислительным устройством, запоминающим устройством с последовательным поиском, сумматором, счетчиками приращения числа оборотов, регуляторами угловой скорости, счетчиком синхроимпульсов, регистром кодов скорости, схемой сравнения кодов, генератором управляющих тактовых импульсов, задающим генератором и блоком управления операциями, причем блок. коммутации соединен своими первыми выходами с регуляторами угловой скоipOCTH, a вторыми вьгходЭМи - со счетчиками приращения числа оборотов, которые подключены своими входами к датчикам оборотов, каждый из которых связан с соответствующим объектом регулирования, нричем первый выход блока управления операциями соединен с сумматором, счетчиком синхроимпульсов и регистром кодов скорости, каждый из которых связан с приводом объекта регулирования, а второй выход блока управления операциями соединен с регулятором угловой скорости и запоминающим устройством и последовательным поиском, подключенным своими выходами к регистру кодов скорости и к счетчику синхроимпульсов и связанным по входу сблоком управления операциями, который соединен своим третьим выходом с регистром кодов
скорости, а своим четвертым выходом связан со счетчиками приращения числа оборотов, подключенными к сумматору, который связан как но входу, так и по выходу с блоком управления операциями и подключен к регистру кодов скорости, регуляторам угловой скорости, счетчику синхроимпульсов и к схеме сравнения кодов, которая связана со счетчиком синхроимиульсов, соединенным по входу с блоком управления операциями, причем задающий генератор связан с блоком коммутации счетчиков ириращения числа оборотов и регуляторов угловой скорости, и с генератором управляющих тактовых импульсов, который соединен с блоком управления операциями, а б ток управления операциями подключен своими выходами к задающему генератору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления углом опережения зажигания двигателя внутреннего сгорания | 1984 |
|
SU1226482A1 |
| Устройство управления углом опережения зажигания двигателя внутреннего сгорания | 1986 |
|
SU1381536A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1984 |
|
SU1217050A1 |
| Импульсный регулятор мощности | 1983 |
|
SU1111143A1 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1972 |
|
SU332438A1 |
| Датчик углового положения и скорости вращения вала | 1985 |
|
SU1278718A1 |
| ОТКАЗОУСТОЙЧИВЫЙ ПРОЦЕССОР С КОРРЕКЦИЕЙ ОШИБОК В ДВУХ БАЙТАХ ИНФОРМАЦИИ | 2021 |
|
RU2758410C1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Устройство для регистрации телевизионного изображения | 1989 |
|
SU1720168A1 |