I
Известно устройство для автоматической разгрузки гидравлического классификатора, содержащее, корпус и поворотный затвор, соединенный посредством системы тяг и рычагов с датчиком уровня.
Целью изобретения я-вляется повышение надежности работы устройства и улучшение качества выгружаемого материала.
Это достигается тем, что датчик уровня соединен качающимся рычагом с эксцентриковым приводом и с ломощью дифференциальйого передаточного механизма и тяги связан с рычагами поворотного затвора и крана дополнительной воды.
Датчик уровня выполнен в виде щарового сектора, а эксцентриковый привод снабжен регулятором числа оборотов.
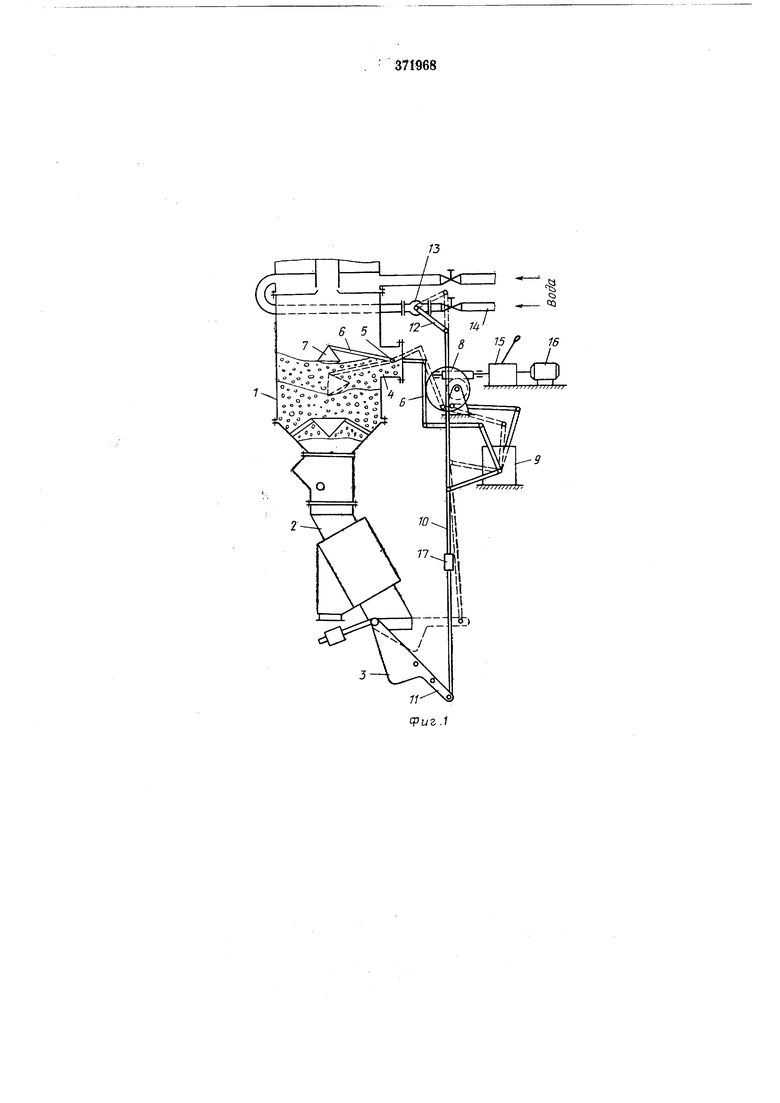
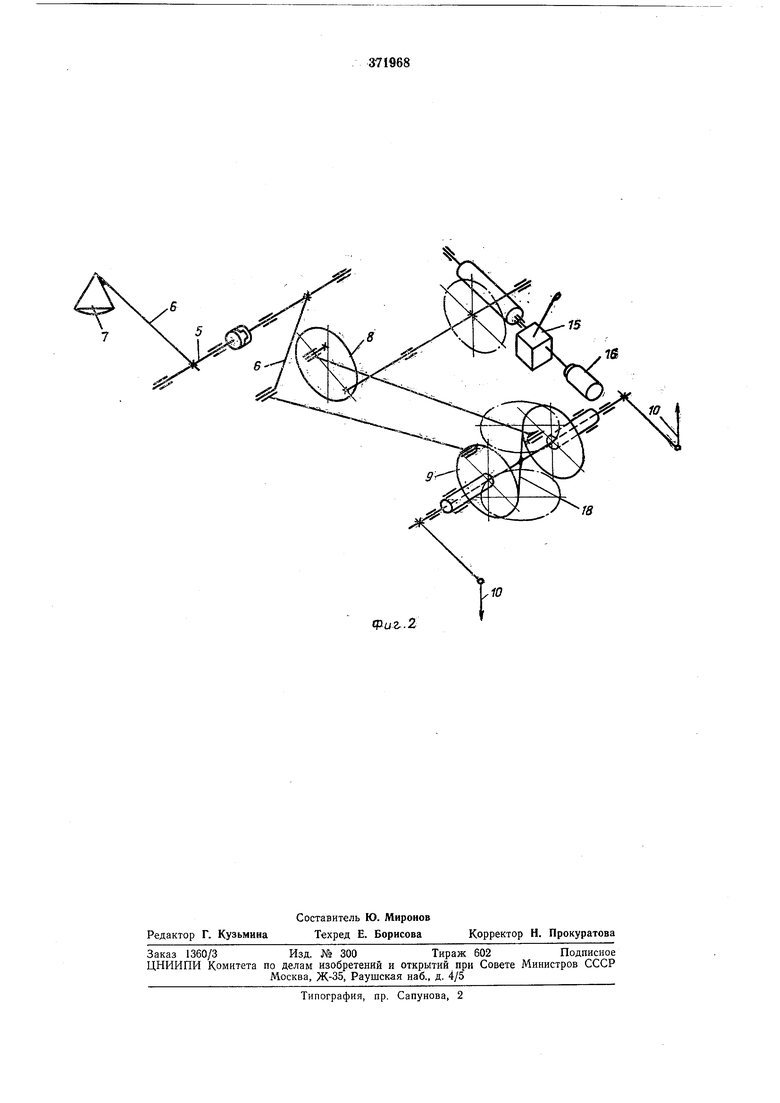
На фиг. / изображено .предлагаемое устройство, обЩИЙ вид,- на фиг. 2 - кинематическая схема устройства.
Устройство для автоматической разгрузки гидравлического классификатора имеет корпус / установленным на его выпускном патрубке 2 поворотным затвором 3. В корпусе посредством патрубка 4 и оси 5 смонтирован качающийся рычаг 6, на котором закреплен датчик уровня 7, для точной фиксации уровня. Качающийся рычаг с ломощью оси выведен из корпуса наружу, соединен с эксцентриковым приводом 8 и с помощью дифференциального передаточного механизма 9 и тяги 10 связан с рычагами 11 и 12 поворотного затвора и пробкового крана 13. Последний подключен в водовод 14 дополнительной воды, подаваемой в гидравлический классификатор для компенсации объема гидросмеси, выпускаемой через затвор.
Эксцентриковый привод, в свою очередь, связан с дифференциальным передаточным
механизмом, а для настройки устройства применительно к различным технологическим условиям путем изменения частоты открытия поворотного затвора, он снабжен регулятором числа оборотов 15, которые он получает от
электродвигателя 16.
Тяга во избежание поломки поворотного затвора в случае попадания крупных включений имеет амортизатор 17. Электродвигатель 16 с заданным числом
оборотов вращает эксцентриковый привод 8, который передает колебательное движение рычагу и возвратно-вращательное движение одной из центральных шестерен дифференциального передаточного механизма 9. Вторая центральная шестерня дифференциального -передаточного механизма получает возвратно-вращательное движение от рычага 6. При этом кинематическая система устройства настроена так, что, когда датчик уровня 7 не достигает
поверхности материала, осевшего в .корпусе
/, обе 1ценТ(ральные шестерни дифференциального Передаточного механизма синхронно поворачиваются на один и тот же угол в нротивоположные стороны, выходную ось, связанную с тягой 10 неподвижной, а новоротной затвор 3 и кран 13 - в закрытом положении.
Как только зернистый материал накопится в корпусе до такого уровня, при котором датчик уровня 7 ляжет на его поверхность рычаг 6, а следовательно, и связанная с ним центральная шестерня дифференциального передаточного механизма начнут совершать повороты на меньший угол, чем шестерня работаюшая от эксцентрикового привода. Эту разницу В Поворотах центральных шестерен дифференциальный передаточный механизм компенсирует -поворотом поводка-крестовины 18 к выходной оси, Которая лередает соответствующие движения через тягу 10 для открытия поворотного затвора 3 и крана /3. Чем больше будет подниматься уровень материала, тем больше будет разница в углах поворота центральных шестерен дифференциала, а следовательно, с каждым поворотом эксцентрикового привода больше будет открываться затвор, выпуская большие порции материала. Пропорционально (этому будет открываться и закрываться кран 13, подавая дополнительную воду для восполнения объема гидросмеси, вышедшей через выпускной патрубок 2. Так будет продолжаться до тех пор, пока количество поступаемого в корпус 1 материала не уравняется с количеством выпускаемого. При уменьшении поступаемого объема материала уро1вень его начнет падать, на что в обратном порядке среагирует дифференциальный передаточный механизм, и степень открытия затвора
и крана с каждым опусканием датчика уровня 7 начнет уменьшаться. Если поступление материала вовсе прекратится, затвор и кран соответственно перекроют отверстие выпускного патрубка и водовод 14. Таким образом, получается следящая самовыравнивающаяся система автоматической разгрузки гидравлического классификатора. ,
Периодическое принудительное открывание и закрывание поворотного затвора исключает прорывы материала и воды из -классификатора, а синхронное открытие крана дополнительной воды в момент выпуска материала исключает нарушение режима классификации и тем самым обеспечивает высокое качество разделения.
Предмет изобретения
1.Устройство для автоматической разгрузки гидравлического классификатора, содержащее корпус и поворотный затвор, соединенный посредством системы тяг и рычагов с датчиком уровня, отличающееся тем, что, с целью повышения надежности работы и улучшения качества выгружаемого материала, оно снабжено эксцентриковым приводом, соединенным качающимся рычагом с датчиком уровня, который через дифференциальный передаточный механизм и тягу связан с рычагами новоротного затвора и краном дополнительной воды.
2.УстройСТ|Во по п. 1, отличающееся тем, что датчик ypoiBHH выполнен в виде шарового сектора. i
3.Устройство по п. 1, отличающееся тем, что эксцентриковый привод снабжен регулятором числа оборотов.
Фаг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ЧЕТВЕРТЬОБОРОТНОЙ АРМАТУРЫ | 2015 |
|
RU2600027C2 |
| Устройство для укладки гибкого полотна в стопу | 1984 |
|
SU1164182A1 |
| Скорострельный пулемет | 2013 |
|
RU2633074C2 |
| ЗУБОРЕЗНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ КОНИЧЕСКИХ КОЛЕС | 1966 |
|
SU222853A1 |
| Гидравлический классификатор | 1972 |
|
SU531544A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ВАЛА МЕХАНИЗМА ПРИВОДА БАШЕННОГО КРАНА | 2004 |
|
RU2278354C1 |
| РОЛЬГАНГ КАЧАЮЩИЙСЯ | 2001 |
|
RU2212293C2 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РАЗГРУЗКИ ГИДРОКЛАССИФИКАТОРА | 1998 |
|
RU2149697C1 |
| МЕХАНИЗМ (ВАРИАНТЫ) И СПОСОБ ИДЕНТИЧНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАПЕЦИЕВИДНЫМ КАЧАЮЩИМСЯ РЫЧАГОМ С РАДИАЛЬНОЙ ТЯГОЙ И МНОГОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2760795C1 |