Данное техническое решение относится к измерительной технике, в частности к приборам и устройствам, которые с помощью механических средств обеспечивают возможность измерения и регистрации данных о работе привода машины.
Техническое решение предназначено преимущественно для его использования в конструкциях грузоподъемных машин, имеющих многодвигательный привод механизмов, в частности в конструкциях башенных кранов с целью обеспечения возможности считывания и регистрации наработок этих механизмов.
Известно устройство для автоматической регистрации числа оборотов вала и времени работы, содержащее приводной механизм с редуктором и муфтой сцепления, счетный и задающий механизмы барабанного типа с цифровым отсчетом, секундомер и механизм автоматического управления исполнительным органом при достижении заданного числа оборотов, при этом с целью исключения возможности включения устройства до сброса счетного механизма на нулевое показание после выполнения задания, в устройство введена кинематическая связь между подпружиненным поводком с полумуфтой и блоком упора механизма выключения, выполненная в виде пластины с угловым срезом, отжимающим подпружиненный поводок и полумуфту [1].
Известен счетчик оборотов, содержащий корпус с входным валом и расположенным внутри суммирующим блоком механического типа, вход которого кинематически соединен через редуктор с входным валом, причем счетчик снабжен маятниковым отвесом, установленным с возможностью вращения вокруг его оси, входной вал жестко связан с корпусом, а суммирующий блок жестко закреплен на маятниковом отвесе [2].
Известен измеритель скорости, содержащий оси постоянной и измеряемой скоростей, указатель скорости, механизм прерывистого движения и дифференциальный механизм, одно из центральных колес которого кинематически связано с осью измеряемой скорости, а водило кинематически связано с осью указателя скорости, причем второе центральное колесо дифференциального механизма связана с осью постоянной скорости через механизм прерывистого движения, который выполнен в виде колеса с размещенной на ней собачкой, свободно сидящего на оси указателя скорости и кинематически связанного с осью постоянной скорости, неподвижного упора и закрепленного на оси указателя скорости колеса с закругленным на его торце дополнительным упором, кинематически связанного с водилом дифференциального механизма [3].
Известен сигнализатор положения выходного вала привода машины, содержащий концевые выключатели, размещенные внутри корпуса, кулачек с регулируемыми упорами, установленный на выходном валу привода и связанный через рычажную систему с подпружиненным в осевом направлении толкателем, на оси перемещения которого установлен один из концевых выключателей, причем в сигнализаторе имеется рычаг поворота подпружиненного толкателя, связанный с регулируемыми упорами кулачка, и поворотный упругий элемент-замыкатель других концевых выключателей, размещенный на толкателе [4].
Общими признаками известных устройств, служащими для считывания и регистрации параметров работы исследуемых объектов является то, что все они имеют корпус, зубчатые передачи механического привода, приводной элемент которого находится посредством передачи во взаимодействии с исследуемым объектом.
Известен датчик перемещений (входящий в состав ограничителя нагрузки крана), при этом датчик перемещений через переходную муфту и дополнительный редуктор обеспечивает возможность регистрации вылета груза, высоты его подъема, передвижения крана и его поворота вокруг вертикальной оси, причем датчик перемещений содержит вал, выполненный с возможностью его соединения с валом лебедки перемещения грузовой тележки крана или с валом грузовой лебедки подъема груза, или с валом привода механизма передвижения крана или с валом привода механизма поворота крана [5].
Для каждого соединения такого датчика перемещений с любым из упомянутых валов привода крана или поворотного элемента конструкции крана требуется отдельная переходная муфта и отдельный дополнительный редуктор, что связано с неоправданными затратами.
Из известных устройств по сущности и достигаемому эффекту наиболее близким к данному техническому решению является преобразователь угловых перемещений вала механизма привода башенного крана, содержащий корпус, в котором установлен первый вал с закрепленным на одном его конце приводным элементом для взаимодействия с валом механизма привода крана и с закрепленной на другом конце первого вала первой шестерней, второй вал с закрепленной на нем второй шестерней, находящейся в зацеплении с первой шестерней, при этом другой конец второго вала соединен со средством регистрации угловых перемещений вала привода [6].
Существенным недостатком известного преобразователя является то, что он не обладает универсальностью, поскольку для установки на различных механизмах привода крана отсутствуют средства такой установки.
Решаемой и достигаемой целью настоящего изобретения является создание универсального преобразователя угловых перемещений валов всех имеющихся на башенном кране механизмов привода крана, а также угловых перемещений поворотных элементов крана.
Поставленная техническая задача решается тем, что в преобразователе угловых перемещений вала механизма привода башенного крана, содержащем корпус, в котором установлен первый вал с закрепленным на одном его конце приводным элементом для взаимодействия с валом механизма привода крана, закрепленную на другом конце первого вала первую шестерню, второй вал с закрепленной на нем второй шестерней, находящейся в зацеплении с первой шестерней, при этом другой конец второго вала соединен со средством регистрации угловых перемещений вала привода, шестерни первого и второго вала расположены на постоянном межцентровом расстоянии, первая и вторая шестерни выполнены с возможностью увеличения или уменьшения их диаметров и передаточного отношения между ними, первая и вторая шестерни, первый вал и приводной элемент выполнены сменными, поводковый элемент выполнен с одной радиальной выемкой под один поворотный элемент привода крана или со множеством радиальных выемок в нем под множество поворотных элементов привода крана, корпус содержит первую часть, на которой закреплено средство регистрации угловых перемещений и первый вал, и разъемно соединенную с первой частью корпуса вторую его часть, в полости которой расположены первая и вторая сменные шестерни.
Первая и вторая части корпуса образуют собой Г-образный контур, в углублении которого расположено средство регистрации угловых перемещений.
На фиг.1 показан преобразователь угловых перемещений вала механизма привода башенного крана,
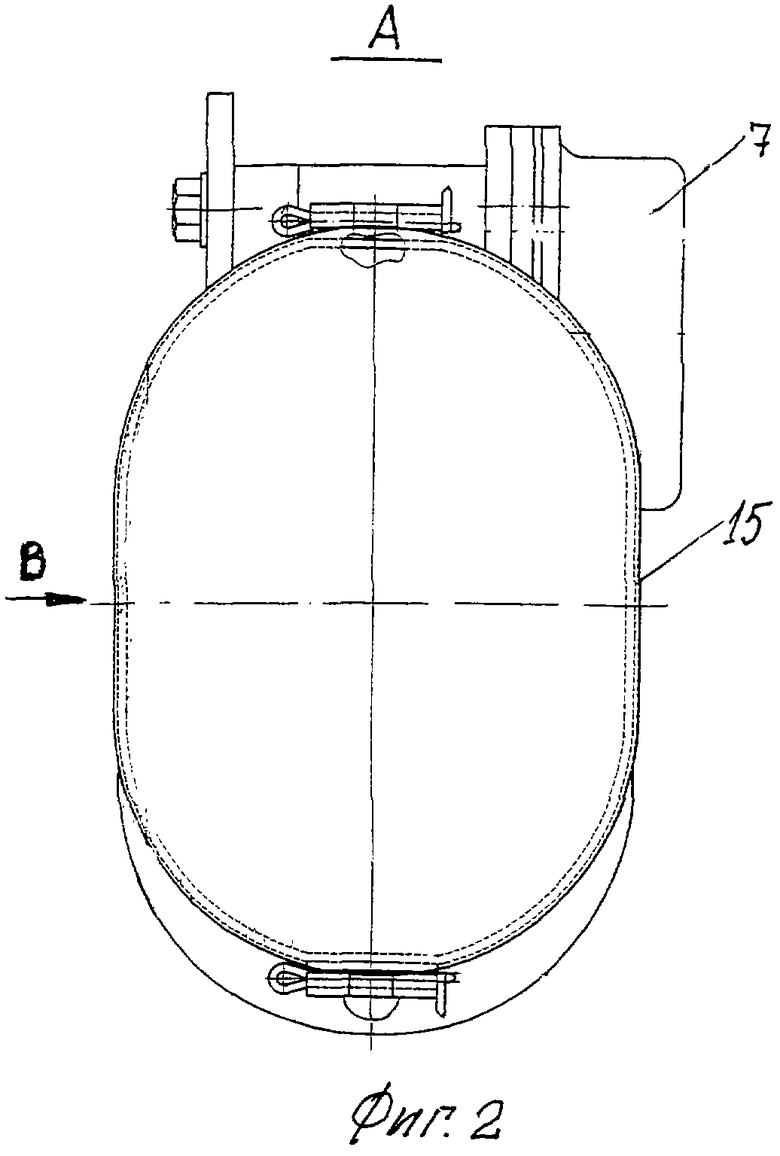
на фиг.2 - вид А на фиг.1,
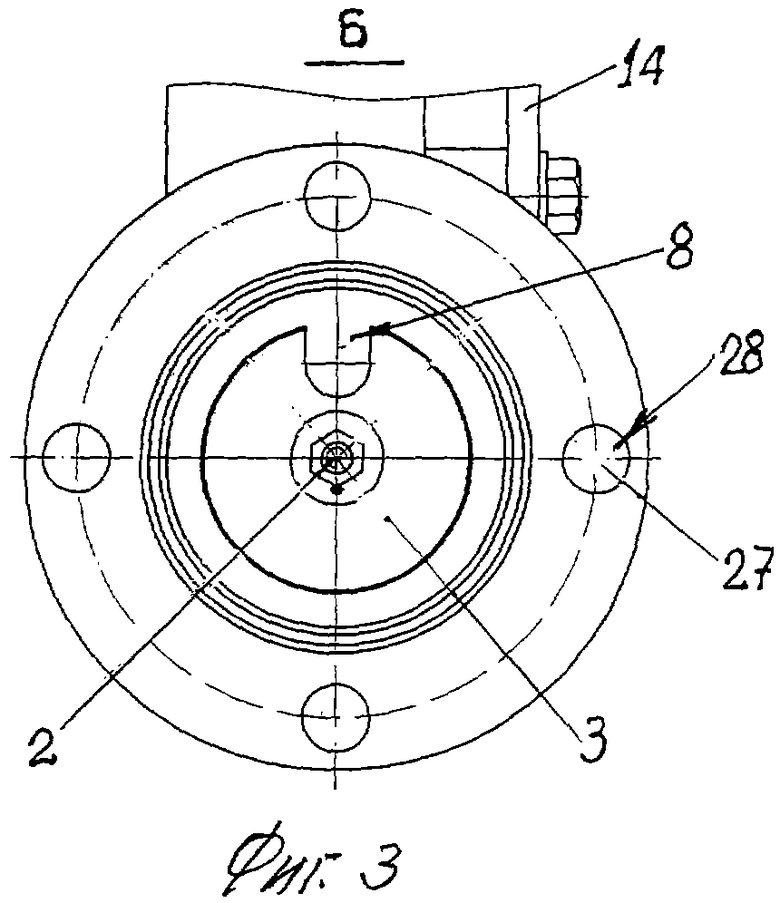
на фиг.3 - вид Б на фиг.1,
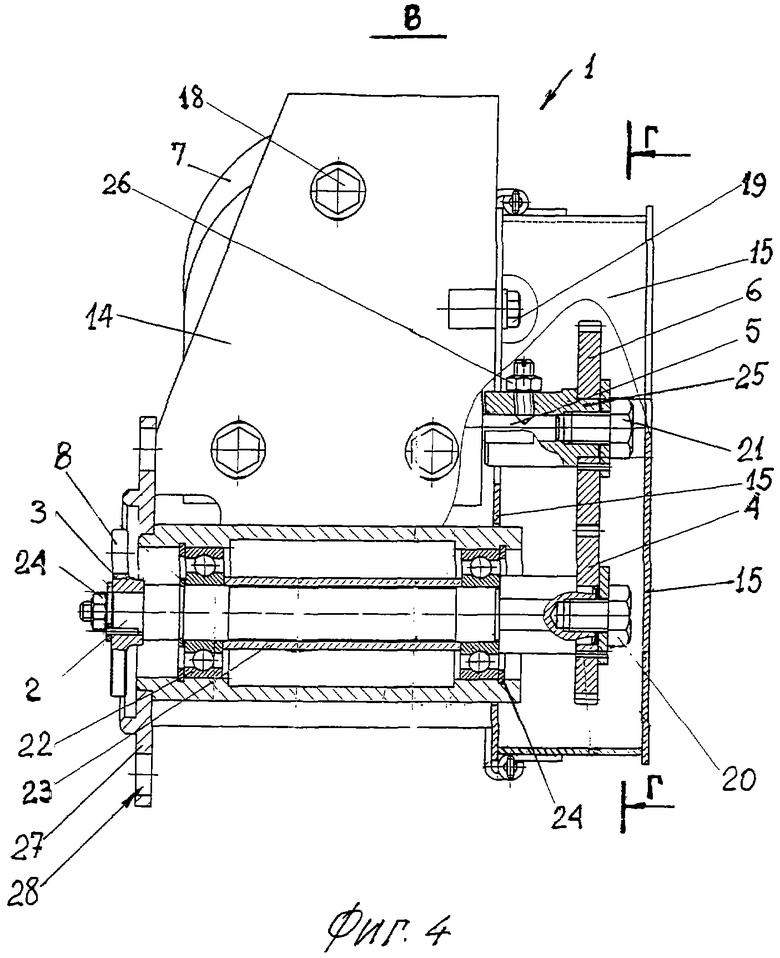
на фиг.4 - вид В на фиг.2,
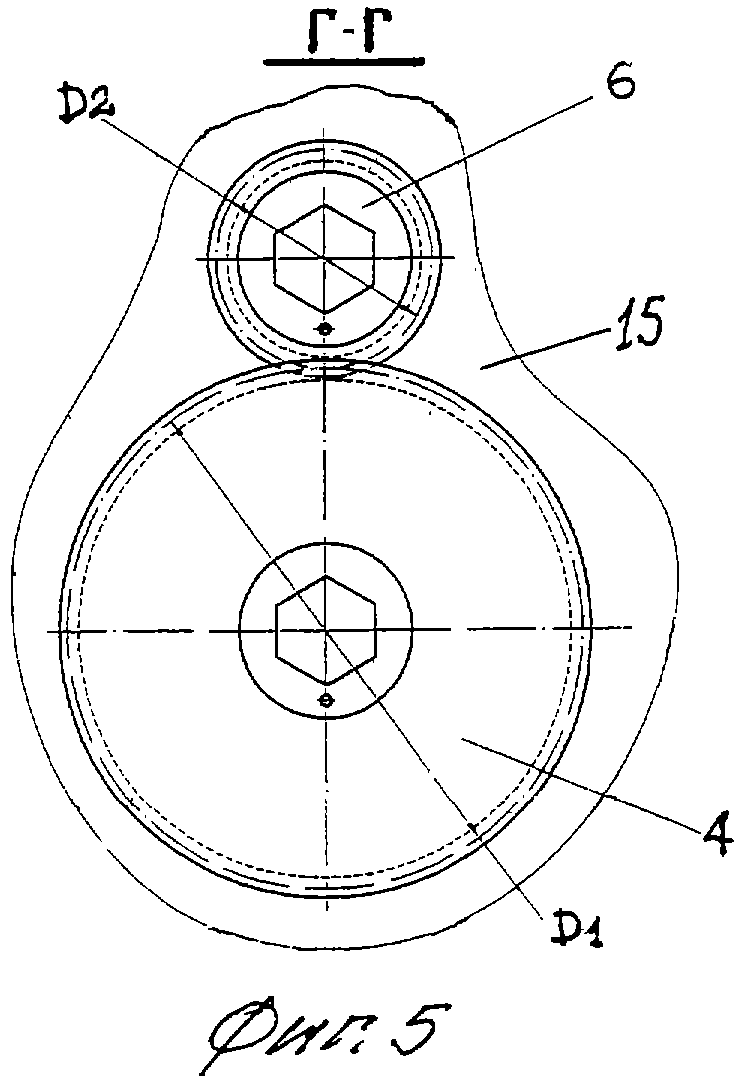
на фиг.5 - сечение Г-Г на фиг.4 (после замены сменных шестерен),
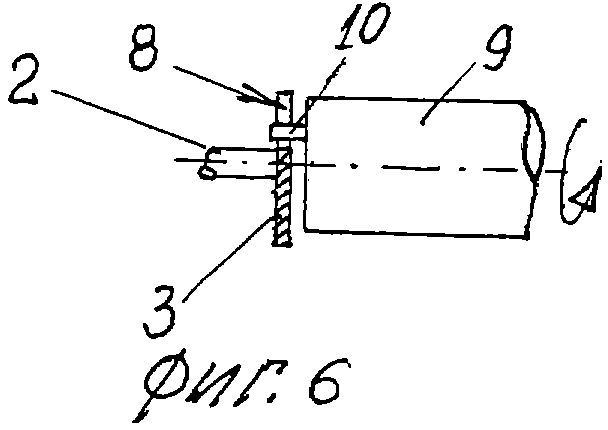
на фиг.6 - схема взаимодействия вала привода крана с приводным элементом, выполненным в виде диска с одной радиальной выемкой,
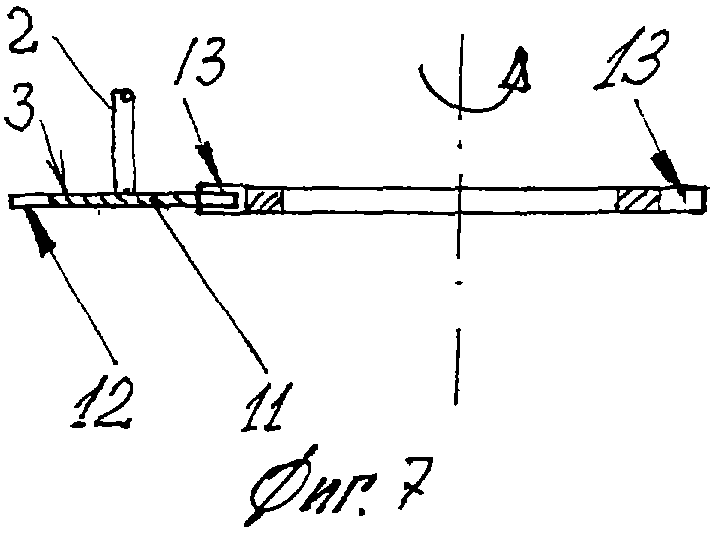
на фиг.7 - схема взаимодействия зубчатого венца механизма поворота крана с приводным элементом, который выполнен в виде диска со множеством в нем радиальных выемок,
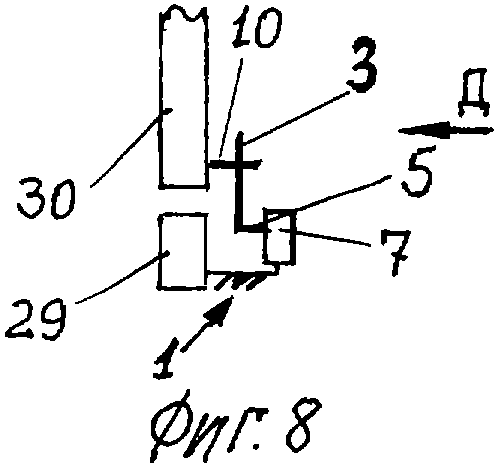
на фиг.8 - схема взаимодействия поворотной в вертикальной плоскости стрелы башенного крана с приводным элементом в виде вилки с одной радиальной выемкой (вид на башенный кран сверху),
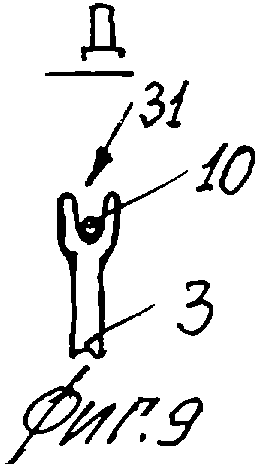
на фиг.9 - вид Д на фиг.8.
Преобразователь угловых перемещений вала механизма привода башенного крана содержит корпус 1 (фиг.1, 4), в котором установлен первый вал 2 с закрепленным на одном его конце приводным элементом 3 для взаимодействия с валом механизма привода крана, закрепленную на другом конце первого вала 2 первую шестерню 4. На втором валу 5 закреплена вторая шестерня 6, находящаяся в зацеплении с первой шестерней 4. Другой конец второго вала 5 соединен со средством 7 регистрации угловых перемещений вала привода. Шестерни 4 и 6, первый и второй валы 2 и 5 расположены на постоянном межцентровом расстоянии. Первая и вторая шестерни 4 и 6 выполнены с возможностью увеличения или уменьшения их диаметров и изменения передаточного отношения между ними в сторону увеличения или уменьшения путем замены шестерен 4 и 6 на шестерни с большим или меньшим диаметром делительной окружности.
Первая и вторая шестерни 4 и 6, первый вал 2 и приводной элемент 3 выполнены сменными. Приводной элемент 3 выполнен в виде диска с одной радиальной выемкой 8 под один поворотный элемент привода крана, например, под эксцентрично жестко закрепленный на валу 9 (фиг.6) привода крана выступ 10. В другом варианте исполнения приводной элемент может быть выполнен в виде диска 11 (фиг.7) со множеством выполненных по окружности диска радиальных выемок 12. В этом случае выемки 12 предназначены для расположения в них множества поворотных элементов привода крана, например, таких поворотных элементов крана, какими являются зубья 13 вращающегося зубчатого венца механизма поворота крана.
Корпус 1 преобразователя содержит первую часть 14 (фиг.1), на которой закреплено средство 7 регистрации угловых перемещений и первый вал 2, и разъемно соединенную с первой частью 14 вторую часть 15, в полости 16 которой расположены первая и вторая сменные шестерни 4 и 6 соответственно.
Первая и вторая части 14 и 15 корпуса 1 преобразователя образуют собой Г-образный контур (фиг.1, 4), в углублении 17 которого расположено средство 7 регистрации угловых перемещений.
Средство 7 регистрации угловых перемещений закреплено на первой части 14 корпуса болтами 18. Первая и вторая части 14 и 15 корпуса соединены между собой болтами 19. Сменные первая шестерня 4 и вторая шестерня 6 жестко закреплены на соответствующих им валах 2 и 5 болтами 20 и 21.
Первый вал 2 установлен в первой части 14 корпуса на подшипниках 22 посредством распорной втулки 23 и запорных колец 24. Приводной элемент 3 закреплен жестко на первом валу 2 гайкой 24.
Вторая шестерня 6 установлена на втором валу 5 посредством переходника 25, который жестко закреплен на втором валу 5 шпилькой 26. Первая часть 14 корпуса 1 преобразователя имеет фланец 27 с отверстиями 28 под болты крепления (не показаны) к механизму башенного крана. Фланец 27 предназначен для соединения преобразователя с различными механизмами привода башенного крана и его узлами.
Приводной элемент 3 может быть выполнен в виде вилки (фиг.9) для установки преобразователя угловых перемещений на оголовке 29 башенного крана. В этом случае поворотный элемент - выступ 10 жестко закреплен на стреле 30. Приводной элемент 3 с выемкой 31 в нем аналогично описанному выше образом может быть закреплен жестко на валу 2 преобразователя или на валу 5. В любом варианте соединения и исполнения приводной элемент 3 кинематически связан со средством 7 регистрации угловых перемещений. Жестко закрепленный на стреле 30 башенного крана выступ 10 кинематически связан с валом стреловой лебедки (не показана) подъема и опускания стрелы башенного крана и, таким образом, по существу выступ 10 связан с валом стреловой лебедки посредством стрелы, каната подъема стрелы и барабана стреловой лебедки, на который намотан канат подъема стрелы, и который жестко закреплен на валу этой лебедки.
Работает преобразователь следующим образом.
На неподвижной части механизма привода башенного крана (механизм передвижения, механизм подъема груза, механизм перемещения грузовой тележки вдоль стрелы крана) крепят фланец 27 преобразователя таким образом, чтобы выступ 10 (фиг.6) вала 9 механизма крана располагался в выемке 8 приводного элемента 3.
При вращении вала 9 любого из вышеназванных приводов крана выступ 10 поворачивает вал 2 вокруг его оси и вращение передается через шестерни 4 и 6 на второй вал 5 и, далее, на средство 7 регистрации угловых перемещений (или вращения вала 9 привода), где эти перемещения преобразуются в электрический сигнал и регистрируются.
Чтобы использовать преобразователь для регистрации угловых перемещений механизма поворота крана, снимают приводной элемент 3 с первого вала 2 и устанавливают вместо приводного элемента 3 другой приводной элемент в виде диска 11 (фиг.7) со множеством в нем радиальных выемок 12 таким образом, чтобы зубья 13 зубчатого венца механизма поворота крана входили в радиальные выемки 12 диска 11 (фиг.7). При необходимости перед установкой диска 11 заменяют вал 2 на другой аналогичный вал, имеющий большую длину и при необходимости изменяют также передаточное отношение пары шестерен 4 и 6 (фиг.4), для чего эти шестерни снимают с валов 2 и 5 и на их места устанавливают другие шестерни с другими диаметрами D1 и D2 делительных окружностей (фиг.5).
При вращении зубчатого венца механизма поворота зубья 13 (фиг.7), расположенные в радиальных выемках 12 приводного элемента 3, выполненного в виде диска 11, поворачивают диск 11 и вместе с ним вал 2 вокруг оси последнего и вращение от зубчатого венца механизма поворота башенного крана передается на второй вал 5 преобразователя и, далее, вращение с вала 5 передается на средство 7 регистрации угловых перемещений, где угловые перемещения вала привода механизма поворот крана преобразуются в электрический сигнал и регистрируются.
Если башенный кран выполнен с подъемной стрелой (поворотной в вертикальной плоскости) и необходимо регистрировать угловые перемещения подъемной стрелы в вертикальной плоскости, то корпус 1 (фиг.8) преобразователя крепят на оголовке 29 башенного крана, выступ 10 крепят на стреле 30 башенного крана таким образом, чтобы он располагался в выемке 31 (фиг.9) приводного элемента 3, который выполнен в виде вилки. При такой схеме, в случае поворота стрелы в вертикальной плоскости вокруг оси ее крепления к оголовку, вместе со стрелой 30 поворачивается вокруг оси поворота стрелы выступ 10, который поворачивает в той же плоскости приводной элемент 3 в виде вилки, последний поворачивает вал 5 и далее угловые перемещения стрелы передаются на средство 7 регистрации угловых перемещений, которое преобразует перемещения стрелы в вертикальной плоскости в электрические регистрируемые сигналы.
Таким образом, описанные выше средства преобразователя, позволяющие устанавливать преобразователь на различных вышеназванных механизмах крана и его частях, позволили создать универсальный преобразователь и существенно снизить затраты на оснащение башенных кранов средствами преобразования угловых перемещений приводных элементов крана в электрические сигналы с целью совершенствования процессами управления кранами.
Источники информации
1. SU 174404 A, 27.08.1965.
2. SU 1265616 A, 23.10.1986.
3. SU 1167503 A, 15.07.1985.
4. SU 726519 A, 05.04.1980.
5. Ограничитель нагрузки крана ОНК-140-35. Инструкция по монтажу, пуску и регулированию. ЛГФИ.408844.009-12 ИМ. ОАО "Арзамасский приборостроительный завод", 2001, с.4-5.
6. Ограничитель нагрузки башенного крана ОНК-160Б, Руководство по эксплуатации. ЛГФИ. 408844.025РЭ, 2000 г., ОАО "Арзамасский приборостроительный завод", с.19 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ БАШЕННОГО КРАНА | 2005 |
|
RU2286305C1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| БАШЕННЫЙ КРАН И СПОСОБ ЕГО МОНТАЖА И ДЕМОНТАЖА | 2006 |
|
RU2333883C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
| БАШЕННЫЙ КРАН И СПОСОБ ЕГО МОНТАЖА И ДЕМОНТАЖА | 2001 |
|
RU2225344C2 |
| БАШЕННЫЙ КРАН И СПОСОБ ЕГО МОНТАЖА | 2001 |
|
RU2225345C2 |
| СТРЕЛА БАШЕННОГО КРАНА | 2000 |
|
RU2225831C2 |
| СТРЕЛА БАШЕННОГО КРАНА | 2000 |
|
RU2225830C2 |
| СТЫКОВОЕ СОЕДИНЕНИЕ МЕТАЛЛОКОНСТРУКЦИИ, В ЧАСТНОСТИ СЕКЦИЙ БАШНИ БАШЕННОГО КРАНА | 2001 |
|
RU2212374C2 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ | 2006 |
|
RU2319657C2 |
Изобретение относится к измерительной технике, в частности к приборам, обеспечивающим возможность измерения и регистрации данных о работе привода машины. Устройство содержит корпус, в котором установлен первый вал с закрепленным на одном его конце приводным элементом для взаимодействия с валом механизма привода крана, закрепленную на другом конце первого вала первую шестерню, второй вал с закрепленной на нем второй шестерней, находящейся в зацеплении с первой шестерней, при этом другой конец второго вала соединен со средством регистрации угловых перемещений вала привода. Корпус содержит первую часть, на которой закреплено средство регистрации угловых перемещений и первый вал, и разъемно соединенную с первой частью корпуса вторую его часть, в полости которой расположены первая и вторая сменные шестерни. Первая и вторая части корпуса образуют собой Г-образный контур, в углублении которого расположено средство регистрации угловых перемещений. Шестерни первого и второго вала расположены на постоянном межцентровом расстоянии, первая и вторая шестерни выполнены с возможностью увеличения или уменьшения их диаметров и передаточного отношения между ними. Первая и вторая шестерни, первый вал и приводной элемент выполнены сменными, приводной элемент выполнен с одной радиальной выемкой под один поворотный элемент привода крана или со множеством радиальных выемок в нем под множество поворотных элементов привода крана. Технический результат заключается в повышении универсальности устройства, снижении затрат на оснащение башенных кранов регистрирующей аппаратурой. 1 з.п. ф-лы, 9 ил.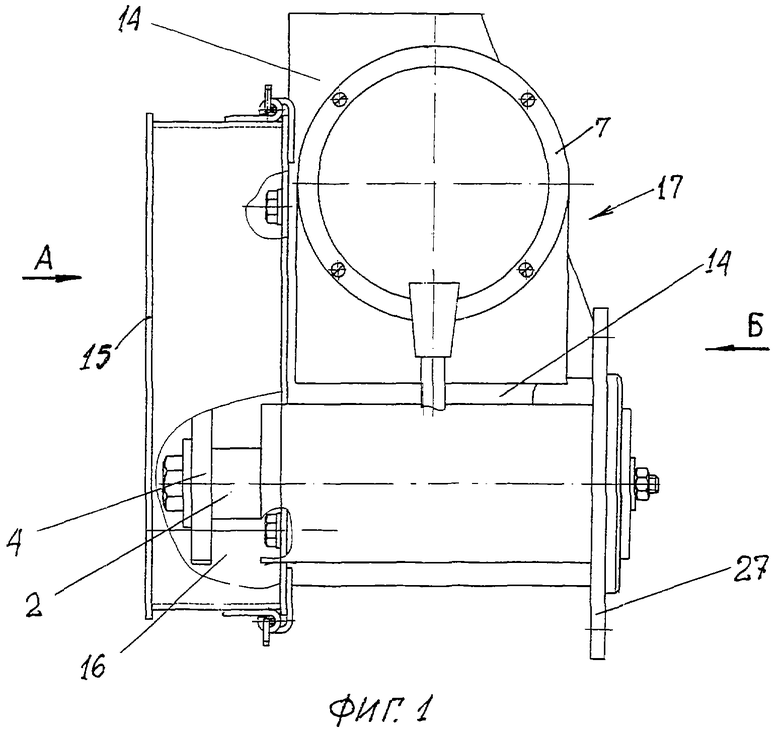
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
| Руководство по эксплуатации | |||
| УСТРОЙСТВО для РАЗБОРКИ ГУСЕНИЧНОЙ ЦЕПИ | 0 |
|
SU408844A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Способ закалки пил | 1915 |
|
SU140A1 |
| Инструкция по монтажу, пуску и регулированию | |||
| УСТРОЙСТВО для РАЗБОРКИ ГУСЕНИЧНОЙ ЦЕПИ | 0 |
|
SU408844A1 |
| "Арзамасский приборостроительный завод", 2001, с.4-5 | |||
| Сигнализатор положения выходного вала привода | 1977 |
|
SU726519A1 |
| Измеритель скорости | 1982 |
|
SU1167503A1 |
| Счетчик оборотов | 1985 |
|
SU1265616A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИИ ЧИСЛА ОБОРОТОВ ВАЛА И ВРЕМЕНИ РАБОТЫ | 0 |
|
SU174404A1 |

