1
Изобретение относится к области транспорта и может бытьИспользовано для подъема тяжеловесов, например мостовых кранов.
Известен шагающий гидродомкрат, выполненный в виде гидроцили,ндра, смонтированного между грузовой и опорной плитами, снабженными, ноднружиненвыми задвижками, ВХОДЯЩИМИ в отверстия направляющих стоек. Управление работой известного гидродомКрата осуществляется вручную посредством запорных вентилей, что весьма неэффективно и связано с определенными неудОбствами и опасностью.
Целью изобретения является повыщевие эффекгги1вности работы щагающего гидродомкрата и повышение производительности проведения монтажных работ при подъеме тяжеловесных конструкцай. Это достигается тем, что шагающий гидродомкрат снабжен системой дистанционного управления, включающей по крайней мере два четырехходовых трехпозиционных золотниковых распределителя, обеспечивающих подачу жидкости от гидровасоса к основному гидроцилиндру и дополнительным, осуществляющим выведение задвижек из отверстий стоек, гидроцилиндрам, взаимодействующим со сливной магистралью через двухходовые двухпозиг ционные золотниковые распределители. Причем для выведения задвижек из отверстий
Направляющих стоек дополнительные гидроцилиндры соединены с задвижками посредством траверз.
Чтобы регулировать скорость подъема гидродомкрата в его магистралях подвода жидкости к полостям основного гидроцилиндра установлены дроссели с ручным регулированием расхода.
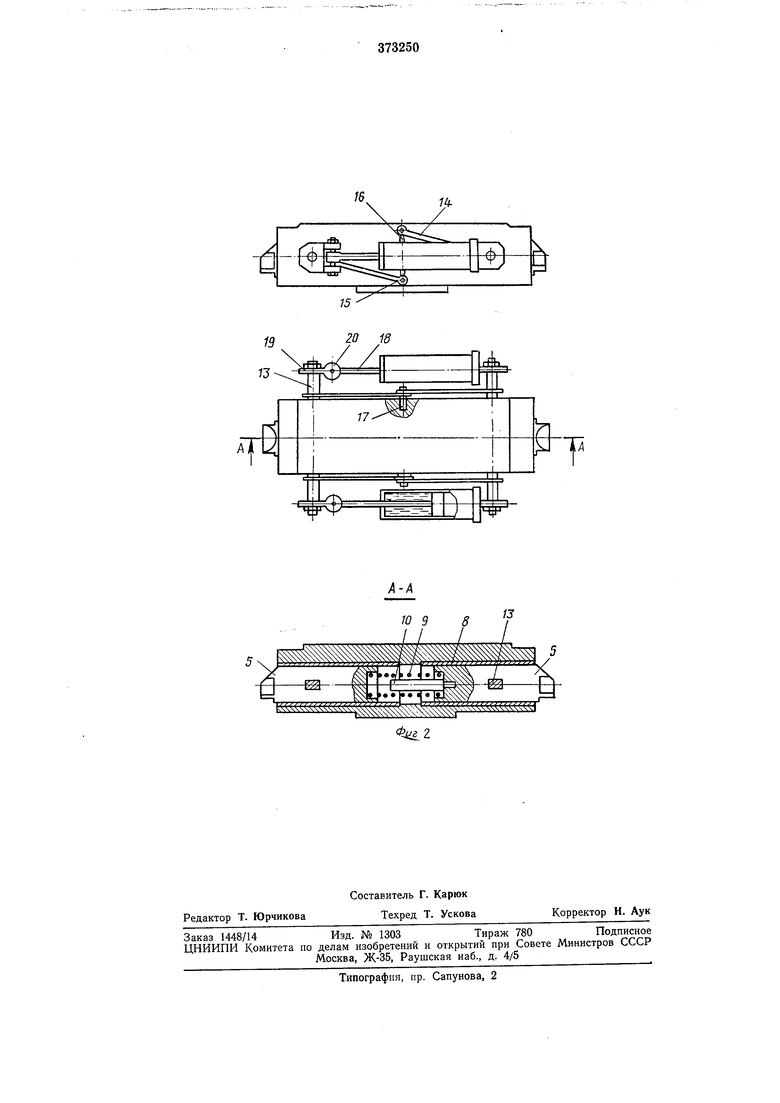
На фи,г. 1 показана схема системы дистанционного- управления гидродомкратом; на фиг. 2 - механизм выведения опорных задвижек, вид сбоку; вид сверХу и. разрез по А-А.
Гидродомкрат содержит основной гидроцилиндр /, корпус которого закреплен на опорной плите 2, а шток 3 - на верхней грузовой плите 4. Опорная и грузовая плиты снабжены опорными задвижками 5, концы которых скошены под соответствующим углом, что обеспечивает автоматическое выведение их из отверстий 6 направляющих стоек 7. Задвижки расположеоы во- втулках 8 (см. фиг. 2), между ними установлены распорные пружннъ 9, имеющие оправы 10, запрессованные в задвижках.
Задвижки связаны с нижними // и верхними 12 дополнительными гидроцилиндрами посредством траверз 13. Причем на каждой плите устанавливаются по два цилиндра с двух ее сторон. На противоположных траверзах шариирно закреплены рычаги 14, соединенные также шарнирно посредством осей 15 с рычагами 16, шарнирно закрепленными ва плитах носредством полуосей 17, ввинченных в плиты, 5 что обеспечивает синхронность движения пары опорных задвижек. Для устранения влияния перекосов и нето чности сборки на работу зшлотнений дополнительных гидроцилиидров их штоки 18 закреплены на травер- 10 зах шарнирво посредством проушйн 19 и осей 20, перпендикулярных к горизонтальным осям траверз. Гидросистема (см. фиг. 1) может питаться от радиально-поршневого насоса 21, имеюще-15 го две нагнетательные магистрали - высокого давления 22 и визкого давления 23 - ипредохранительные клапаны, отрегулированные на давления, соответствующие двум наnopHbiiM ЛИНИЯМ , встроенные в насос. Рабо-20 чая жидкость из бака 24 через фильтр 25 и насос по магистрали высокого давления подведена к четырехходовому трехпозициовному золотниковому распределителю 26 с электрогидравлическим управлением от элек-25 тромагннтов 27 и 28 я аналогичному распределителю 29 с электрогидравлическим управлением от электромагнитов 30 и 31. От распределителя 26 жидкость может быть подана по трубопроводам 32 и 33 к дополнительным30 гидроцилиндрам выведения опорных задвижек и отведена по трубопроводам 34 и 35 через двухходовые двухпозицирниые золотниковые распределители 36 н 37 с электрогидравлическим управлением от электромаг-35 нитов 38 и 39 по сливному трубопроводу 40 в бак. От распределителя 29 жидкость может быть подведена к нижней и верхней полостям основного гидроцили.ндра по трубопроводам 41 и 42 через дроссели 43 и 44,40 регулирующие расход жидкости, и отведена по сливной магистрали. 45 в бак. По магистрали низкого давления жидкость подведена к распределителям 26, 36, 37 и 29 для управленИя ими. Насос приводится в движе-45 ние от электродвигателя 46. Конечные выключатели 47 и 48 могут взаимодействовать соответственно с гидроцилиндрами выведения опорных задвижек верхней и нижней плит. Для приведения в действие конечных50 вьгключателей 49 и 50 использован рабочий ход основного гидроцилиндра /. Указанные конечные выключатели являются составной частью нринципиальной электросхемы управления и предназначены для проведения соот-55 ветствзтощих изменений в электросхеме в процессе ра-боты шагающего гидродомкрата. Управление работой гидродомкрата может быть осуществлено с помощью командоконтролера кулачкового типа на четыре по-60 ложения: «начальное, «автоматический подъем, «опускание верхней опорной плиты, «опускание нижней опорной плиты. Гидродомкрат работает следующим обра65Двигатель включается в работу от электросети и приводит в движение насос. Жидкость из бака через фильтр поступает в насос и подводится к распределителям 26 и. 29 по магистралям высокого и низкого давлекия. Электромагниты 27, 28, 30 и 31 ipacapeделителей 26 и 29 обесточены, золотники их находятся в среднем запирающем положении, и жидкость сливается в бак через предохранительные клаланы, встроенные в насое. Плиты находятся в максимальном сближении, опорные задвижки верхней и нижней плит находятся в отверстиях направляющих стоек, восприн1имаюш,их вес аодним аемого груза. Положение конечных выключателей 47-50 таково, что устройство готово к работе на автоматический подъем, При установке рукоятки командоконтролера на автоматический подъем подается импульс электрического тока на срабатывание электромагнита 3, который срабатывая, открьгвает доступ жидкости из магистрали низкого давления в распределитель 29. Золотник последнего перемещается влево, открывая доступ жидкости из магистрали высокого лтавленИЯ. Жидкость под высокам давлением по магистрали 22 через распределитель 29, трубопровод 41 и дроссель 43 поступает в нижнюю полость основного гидроцилиндра /. Рабочее давление, воздействуя на шток 3, заставляет его п.еремещаться вверх, вытесняя жидкость из верхней полости гидроцилиндра / через дроссель 44, трубопровод 42, распределитель 29 и сливную магистраль в бак. Опорные задвижки верхней плиты 4, взаимодействуя скошенными поверхностями, с кромкой отверстий направляющей стоки, выходят из отверстий, сжимая пружину. Как только верхняя плита переместится ва величипу рабочего хода гидроцилиндра /, опорные задвижки нодходят к следующим отверстиям направляющей стойки и под действием пружины заходят в отверстия. При этом конечные выключатели производят в электросхеме такие изменения, при которых подается импульс на срабатывание электромагнита 30 раснределителя 29. Электромагнит 30 срабатывает, золотник распределителя перемещается вправо и жидкость по магистрали высокого давления через распределитель 29, трубопровод 42 и дроссель 44 поступает в верхнюю полость гидроцилиндра 1, нижняя опорная плита подтягивается до верхней плиты на величину рабочего хода гидроцилиндра 1, а жидкость из нижней полости через дроссель 43, распределитель 29 и магистраль 45 сливается в бак. Как только опорные задвижки, нижней опорной плиты западут в отверстия направляющей стойки, устройство совершит один цикл на автократический подъем и готово к его повторению, т. е. готово переместить верхнюю опорную плиту на величину шага (хода) гидроцилиндра 1. Работа устройств а может быть начата и акончена в любом положении гидродомкрата, как при максимальном сближении и удалении опорных плит, так и в любом их промежуточном положении, установкой рукоятки командоконтролера на «автоматический подъем или «начальное положение.5 Опускание верхней 4 и нижней 2 опорных плит производится раздельно установкой рукоятки командоконтролера в положение «опускание верхней опорной плиты или «опускание нижней опорной плиты. Если 10 опорные плиты -находятся в максимальном удалении, соответствующем величине рабочего хода гидроцилиндра /, рукоятка командоконтролера ставится в положение «опускание верхней опорной плиты. Состояние элек- 15 тросхемы таково, что подается импульс на срабатывание электромлгнита 28 распределителя 26. Золотник распределителя 26 перемещается вправо, жидкость по магистрали 22 через распределитель 26 и трубопровод 32 20 поступает в дополнительные гидроцилиндры выведения задвижек верхней опорной, плиты. Гидроцилиндры, воздействуя через траверсы 13(см. фиг. 2) Hia опорные задвижки, выводят ИХ из отверстий направляющих стоек, 25 сжимая пружины. Синхронизация выведения опорных задвижек осуществляется рычагами 14и 16. Как только опорные задвижки будут выведены из отверстий направляющей стойки, иодается импульс на срабатывание элек- 30 тромагнита 30 распределителя 29, золотник его перемещается вправо, и жидкость по магистрали 22 через распределитель 29, трубопровод 42 и дроссель 44 поступает в верхнюю полость гидроцилиндра 1. Верхняя грузовая 35 плита со щтоком опускаются, вытесняя жидкость из нижней полости гидроцилиндра через дроссель 43, трубопровод 41, распределитель 29 и сливную магистраль 45 в бак. При прохождении щтоком половины пути (хода) 40 подается импульс на срабатыв ание электромагнита 38 распределителя 36. Электромагнит 38 .срабатывает, золотник, распределителя 36 смещается влево, и как только опорные задвижки верхней плиты подойдут к отвер- 45 стиям направляющей стойки, они западают в отверстия под действием пружин и жидкость из дополнительных гидроцилиндров по трубопроводу 34 через распределитель 36 и магистраль 40 сливается в бак.50 Как только опорные задвижки полностью войдут в отверстия направляющих стоек, золотнИКи распределителей 26 и 36 занимают среднее запирающее положение. Опускание верхней плиты закончено. Для опускания нижней опорной плиты необходимо рукоятку командоконтролера поставить в положение «опускание нижней опорной плиты, при этом опорные плиты находятся в максимальном сближении. При опускании нижней опорной плиты в, работе участвуют дополнительные гидроцилиндры выведения опорных задвижек нижней опорной плиты и распределители 26, 37 и 29. Работа устройства цри этом аналогична описанной выше работе устройства при опускании верхней грузовой плиты. Работа устройства на опускание верхней и нижней плит может начинаться и заканчиваться при любом положении штока основного гидроцилиндра. Описанное устройство может быть применено для дистанционного управления одновременно несколькими щагающими гидродомкратами. Предмет изобретен1ия 1.Шагающий гидродомкрат, включающий гидроцилиндр, смонтированый между грузовой и опорной плитами, снабженными подпружиненными задвижками, входящими в отверстия направляющих стоек, отличающийся тем, что, с целью повыщения эффективности работы, OHI снабжен системой дистанционного управления, включающей по крайней мере два четырехходовы-х трехпозиционных золотниковых распределителя, взаимодействующих со сливной магистралью через двухходовые двухпозициониые золотниковые распределители. 2.Гидродомкрат по п. 1, отличающийся тем, что, с целью регулирования скорости его подъема, в магистралях подвода жидкости к полостям основного гидроцилиндра установлены дроссели с ручным регулированием расхода. 3.Гидродомкрат по п. 1, отличающийся тем, что, с целью выведения задвижек из отверстий направляющих стоек, дополнительные гидроцилиндры соединены с задвижками посредством траверз.
52
18 12
44
/4
g
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная дождевальная система | 1979 |
|
SU888876A1 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2004 |
|
RU2274996C2 |
| Транспортное средство для перевозки крупногабаритных грузов | 1986 |
|
SU1331692A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА НАВЕСКИ ТРАКТОРА | 1997 |
|
RU2146082C1 |
| Гидропневмоударная трамбовка | 1990 |
|
SU1742417A1 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТАБЕЛЬНОГО МОДУЛЯ-КОНТЕЙНЕРА | 2002 |
|
RU2211793C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА НАВЕСНОГО УСТРОЙСТВА ТРАКТОРА | 2002 |
|
RU2233572C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| Устройство для автоматического управления гидронавесной системой сельскохозяйственного трактора при ресурсных испытаниях | 1976 |
|
SU700075A1 |
| Подъемное устройство | 1980 |
|
SU975553A1 |

s ;;;;; ; ; : ; ;;:
20 18
