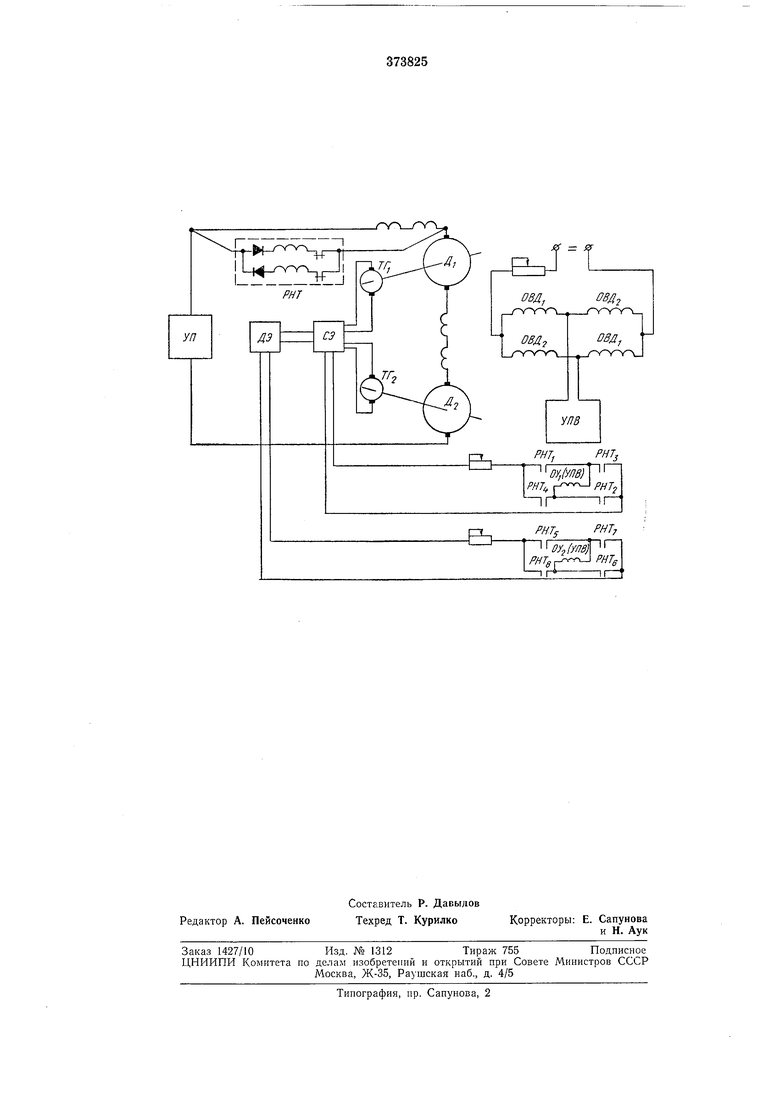
Известно устройство для управления элек-. троприводом с четным числом последовательно соединенных двигателей постоянного тока, питаемых от управляемого преобразователя с регулированием возбуждения двигателей. В таком устройстве регулирование возбуждения каждого двигателя осуществляется при помощи обратной связи по напряжению или по производной от напряжения того же двигателя. Предлагаемое устройство позволяет уменьшить динамические усилия в механической передаче путем демпфирования противофазных колебаний двигателей каждой пары. Это достигается тем, что вход регулятора возбуждения каждой пары двигателей подключен к выходу реверсора, соедиаевного своим входом с датчиком разности скоростей соответствующих двигателей. Обмотки двигателей выполнены секционированными и подключены по мостовой схеме так, что диагонально противоположные плечи моста образованы секциями обмотки одного двигателя с подключением к одной диагонали моста источника неизменного постоянного напряжения, а к другой выхода регулятора. Реверсор образован контактами реле направления тока якорной цепи. Вход реверсора может быть соединен с датчиком разности скоростей через дифференцирующее звено. Выход датчика скорости может быть соединен со входом регулятора как через реверсор, так и через дифференцирующее звено с реверсором. На чертеже дана схема описываемого устройства для управления двухдвигательным приводом. Якори UI и Да двигателей соединены последовательно и подключены к управляемому преобразователю УЯ. Обмотки возбуждения ОВД1 и ОВД двигателей включены по мостовой схеме с питанием одной диагонали моста от источника неизменного постоянного напряжения, а другой от регулятора УПВ возбуждения. В устройстве использованы две отрицательные обратные связи по разности скоростей и по производной от этой разности с соответствующими двумя входами ОУа и ОУ регулятора. Датчик разности скоростей образован тахогенераторами ТГ и. ТГ, встречно соединенными в элементе сравнения СЭ, выход которого является выходом датчика. Один выход датчика разности скоростей через реверсор, образованный контактами PHTi-PHT, подключен: ко входу ОУ регулятора, а дрзгой - к дифференцирующему звену ДЭ, выход которого через реверсор, образованный контактами РНТ -PHTg, .подключен ко входу ОУ2 регулятора УПВ. В к ;честве реверсирующего аппарата использовано реле РНТ направленпя тока якорной цепи. Суммирующий элемент сравнения СЭ может быть выполнен в виде потенциометра или осуществлять магнитное сравнение на обмотках управления регулятора УПВ. В качестве управляемого преобразователя УЯ может быть использован тиристорный реверсивный преобразователь или двухтактный блок магнитных усилителей.
Основную долю статической мощности возбуждения, соответствующую номинальным параметрам, цепь возбуждения двигателей получает от бортовой сети постоянного тока (например, ва экскаваторах напряжение бортовой сети 110 в получают от генератора собственных нужд). Питающее напряжение бортовой . сети подается на одну из диагоналей моста, плечи которого образованы полуобмотками возбуждения двух двигателей. На другую диагональ этого же моста подключается выход регулятора УПВ. Величина сигнала в цепи управления регулятора УПВ пропорциональна разности амплитуд колебаний скорости двигателей Д и Да- Коэффициент усиления системы управления потоками возбуждения может регулироваться изменением добавочных сопротивлений в цепи обмоток управления регулятора УПВ, а фаза сигнала управления - изменением соотнрщений величины сигналов жесткой и гибкой обратных связей по разности скоростей двигателей. Полярность обратных связей по разности скоростей и по производной от разности скоростей должна изменяться при изменении знака момента двигателей (тока главной цепи) . Для этого в схеме служат реле РНТ.
Таким образом, предлагаемое устройство позволяет уменьщить динамические нагрузки в передачах электромеханических упругих: систем многодвигательных электроприводов в результате использования активных методов воздействия на величину моментов двйгате- лей в замкнутой системе управления, входом для которой служит непосредственно разность амплитуд глеханических колебаний скорости двигателей в электромеханической системе.
Ё устройстве могут быть использованы отрицательная обратная связь по разности скоростей двигателей, колеблющихся в противофазе, обратная связь по производной от разности скоростей двигателей, а также сочетание этих двух обратных связей в замкнутой системе управления, потоками возбуждения двигателей.
Предмет изобретения
1.Устройство для управления электроприводом с четным числом последовательно соединенных двигателей постоянного тока, питаемых от управляемого преобразователя с регулированием возбуждения двигателей, в котором двигатели соединены с. общим приводным механизмом через упругие звенья, отличающееся тем, что, с целью уменьшения динамических усилий в механической переда-че путем демпфирования противофазных колебаний двигателей каждой пары, вход регулятора возбуждения каждой пары двигателей подключен к выходу реверсора, соединенного своим входом с датчиком разности скоростей соответствующих двигателей, причем обмотки двигателя выполнены секционированными и подключены по мостовой схеме так, что диагонально противоположные плечи моста образованы секциями обмотки одного двигателя с подключением к одной диагонали моста источника неизменного постоянного напряжения, а к другой выхода регулятора.
2.Устройство по п. 1, отличающееся тем, что реверсор образован контактами реле направления тока якорной цепи.
3.Устройство по п. 1, отличающееся тем, что вход реверсора соединен с датчиком разности скоростей через дифференцирующее звено.
4.Устройство по п. 1, отличающееся тем, что выход датчика скорости соединен со входом регулятора как через реверсор, так и через дифференцирующее звено с реверсором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| Электрическая передача электровоза | 2017 |
|
RU2674998C1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1372516A1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Система управления положением транспортного механизма | 1985 |
|
SU1386955A1 |
| Многодвигательный электропривод | 1989 |
|
SU1676061A1 |
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |
| Электропривод с автономным источником питания | 1984 |
|
SU1236594A1 |