1
Изобретение касается управления быстродействующими электропроводами постоянного тока, имеющими ре-дукторы с большими зазорами или канатные передачи, например, электропроводов постоянного тока лебедок буровых установок, электропроводов копающих механизмом одноковшовых экскават.оров или схем управления главными приводами прокатных станов, имеющим связь между электродвигателем и клетью с помощью валов с карданными сочленениями.
Для электроприводов одноковшовых экскаваторов характерен режим внезапного стопорения ковша, для подъема буровых колон г- режим прихвата. В этом режиме, независимо от структуры управляющего (задающего) устройства, для ограничения динамических нагрузок на механизм требуется резкий с максимально допустимой скоростью реверс тока в якор;1Ой цепи электродвигателя. Для электродвигателей прокатных станов, например непрерывных, требуется наращивание или снижение момента с максимальной скоростью при очень широком возможном диапазоне скоростей и ускорений .
Известно устройство для регулирования скорости вращения электродвигателя, содержащее источники регулируемого напряжения, подключенные
5 к якорю и к обмотке возбуждения электродвигателя, регулятор тока якоря, подсоединенный к датчику тока якоря, регулятор скорости электродвигателя, подключенный к датчику скозрости, причем между входом и выходом регулятора скорости включены входы по переменному току диодно-мостовой схемы 1.
Недостатком такого устройства
15 является то, что в нем не обеспечивается ограничение ударов в передачах и рывков канатов, а также не предусматривается повышение испольаования коммутационных возможностей электродвигателя за счет регулирования амплитуды и скорости изменения тоха якоря в зависимости от режима работы электродвигателя.
25 Наиболее близким по технической сущности к предлагаемому является устройство двухзонного регулирования скорости электропривода, содержащее источники регулируемого нлJO пряжения, подключенные к якорю и к
Обмотке возбуждения электродвигателя, регулятор тока якоря, подсоединенный к датчику тока якоря, регулятор напряжения на якоре, подсоединенный к датчику напряжения на якоре, датчик тока возбуждены я,подключенный к блоку нелинейности, Входы диодно-мостовой схемы по переменному току включены между входом и выходом регулятора напряжения на якоре, а к входеии постоянного тока подключен выход сумматора, входы которого соединены с блоком нелинейности и выделителем якоря напряжения 2.
В таком устройстве величина предельно допустимого тока якоря электродвигателя регулируется в соответствии с законом коммутации в функции тока возбуждения и напряжения на якоре. Однако устройство применимо только, для механизмов с большим моментом инерции, с небольшой статической нагрузкой и с низкой требуемой точностью поддержания скорости в установившемся режиме. Снижение ударов при выборе зазоров предусматривается при регулировании тока возбуждения в функции тока якоря, а этот способ регулирования не может быть применен в электроприводах механизмов с повышенными требованиями к стабильности скорости, например прокатные станы или электроприводы буровых установок.
Кроме того, в т-аком устройстве, предназначенном для механизмов с большим моментом инерции, не учитывается изменение допустимой скорости нарастания или спаданид тока якоря с изменением режима работы электродвигателя. Учет известного закона, апроксимирующего предельный график тока
/.
о.
ТРОГ
-N.
л.ном Рй.нои я. f заменен менее точным,
(-1Uo
ДОПТРОГ
я. ном «я.НОМ ЧЧ ИОк JViHOM
и„
VCPunu
так как этот легче поддается осуществлению в схеме.
Целью изобретения является снижение ударов в механизме при повышении быстродействия электропривода и улучшение использования коммутационных возможностей электродвигателя.
Это достигается тем, что в предложенный электропривод постоянного тока, содержащий последовательно включенные задающее устройство, регулятор скорости, регулятор тока с подключенными к их входам соответствеино датчиками скорости и тока и,вентильный преобразователь, питающий якорную цепь электродвигателя, преобразователь в цепи обмотки возбуждения электродвигателя.
диодный мост, включенный диагональю переменного тока в цепь обратной связи регулятора скорости , сумматор, к одному из входов которого через первый блок нелинейности подключен датчик тока возбуждения, и соединенный с датчиком напряжения Первый блок выделения модуля, введены последовательно соединенные второй блок нелинейности, датчик статического момента электродвигателя, второй блок выделения модуля и пороговый элемент, а также блок перемножения, второй диодный мост, третий блок нелинейности, третий блок выделения модуля, диод и резисторы, при этом входы второго и третьего блоков нелинейности подключены к датчику тока возбуждения, выход первого блока нелинейности через резистор,.шунтирующий первый блок выделения модуля, соединен со вторым входом сумматора, выход которого подключен к диагонали постоянного тока второ.го диодного моста, диагональ переменного тока которого включена в цепь -обратной связи регулятора тока якоря, выход порогового элемента через- второй резистор, шунтированный третьим блоком выделения модуля, входом подключенного к датчику напряжения, соединен с одним из входов блока перемножения, второй вход которого подключен к выходу третьего блока нелинейности, а выход - через диод встречно диагонали постоянного тока первого диодного моста, шунтированной третьим резистором.
Такое соединение обеспечивает начало быстрого нарастания тока якоря только после возрастания статического момента на валу электродвигателя, т.е. по окончании выбора зазоров и слабин, и регулирование предельной - величины тока якоря электродвигателя по законам, более точно учитывающим влияние различных факторовна ее допустимое значение.
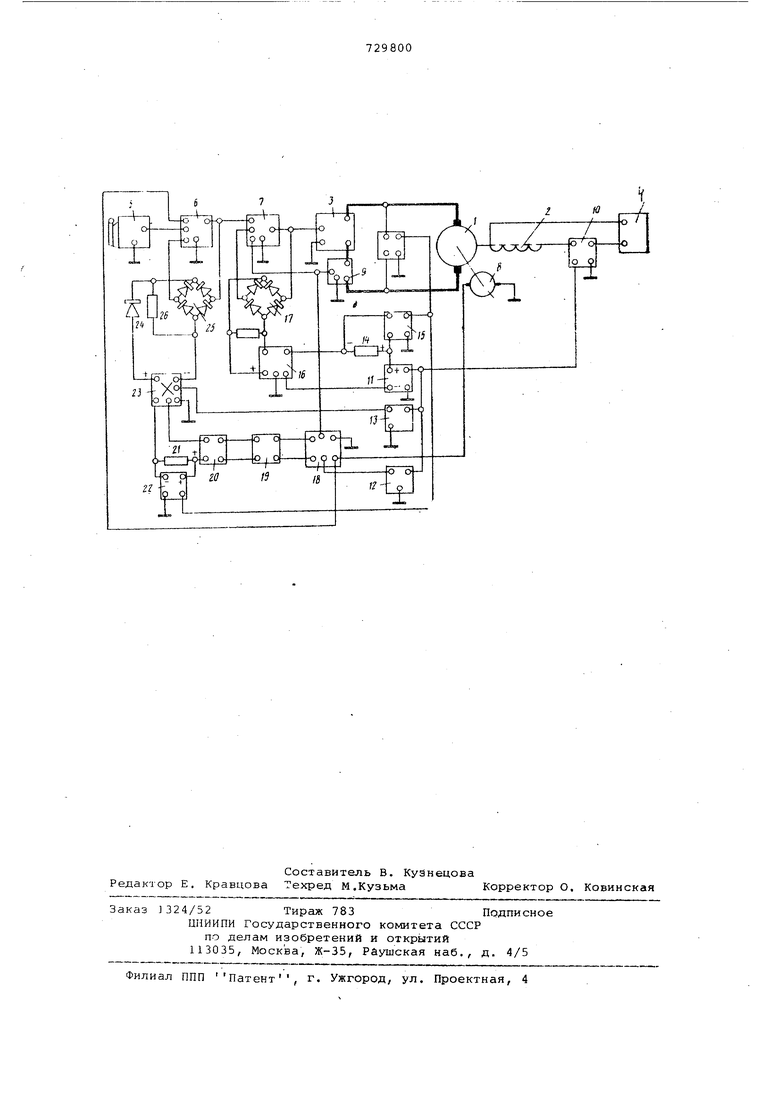
На чертеже приведена схема предложенного электропривода.
Электропривод содержит электродвигатель постоянного тока с якорем
Iи обмоткой возбуждения 2, питающимися соответственно от вентильных преобразователей 3 и 4. В цепь управления преобразователя 3 включены последовательно соединенные задающее устройство 5, регулятор скорости б и регулятор тока якоря 7,
к входам которых подключены соответствующие датчики - датчик 8 скорости и датчик 9 тока якоря. Датчик 10 тока возбуждения соединен с входами трех блоков нелинейности 11, 12 к 13. йлход блока нелинейности
IIчерез резистор 14, шунтирующий выход блока 15 выделения модуля,подключе к входу сумматора 16, выход которого подключен к диагонали постоянного тока диодного моста 17, диагонально переменного тока, включенного в цепь обратной связи регулятора тока 7. Выход блока нелинейности 12 через последовательно соединенные датчик 18 статического момента, блок 19 выделения модуля, пороговый элемент 20 и резистор 21, шунтирующий выход блока 22 выделения модуля, подключен к первому входу блока 23 перемножения, второй вход которого соединен с выходом блока нелинейности 13, а выход через диод 24 встречно диагонали постоянного тока диодного моста 25, шунтированной резистором 26.
Работает электропривод следующим образом.
При отсутствии сигнала на выходе задающего устройства 5 на выходе регулятора 6 скорости, регулятора 7 тока якоря и вентильного преобразователя 3 напряжение равно нулю, поэтому ток якоря электродвигателя и статический момент на его валу равны нулю. Напряжение на выходе датчика 18 статического момента,построенного, например, по принципу аналогового вычислительного устройства, равно нулю. Равно нулю также напряжение на выходе порогового элемента 20, блока 23 умножения и подпирающее напряжение на входах постоянного тока диодной мостовой схемы 25.
После появления сигнала на выходе устройства 5 появляется относите.:ьно небольшой сигнал на выходе регулятора 6, так как между выходом и входом этого регулятора в этом режиме существует сильная отрицательная обратная связь через схему 25 и резистор 26. Напряжения на выходе регулятора 6 сравнивается на входе регулятора 7 с напряжением на выходе датчика 9 тока якоря. Эта разность образует сигнал, обуславливающий возможное максимальное напряжение на выходе регулятора 7 тока якоря. Фактическая величина напряжения на выходе регулятора 7 определяется напряжением подпора на входа диодной мостовой схемы 17. Это напряжение подпора определяется напряжением на выходе блока 11 нелинейности и блока 15 выделения модуля напряжения на якоре в соответствии с законами, определяющими допустимую скорость изменения тока якоря электродвигателя. Под действием напряжения на. входе преобразователя 3 появляется напряжение на якоре 1 электродвигателя и на входе датчика напряжения 6, появляется ток в якорной цепи и напряжение на выходе датчика 9 тока якоря. Поскольку величина тока якоря и, следовательно, момента в этом режиме ограничена, выбор зазора в передачах и слабин в канатах производится с небольшими усилиями. Так как в этом режиме статический момент на валу электродвигателя мал, невелико напряжение на выходе датчика 18, пороговый элемент 20 не срабатывает и до окончания выбора зазора предельная величина тока и момента не изменяются.
0
По окончании выбора зазоров происходит скачкообразный рост статического момента на валу якоря 1 электродвигателя. Вследствие этого скачкообразно увеличивается напря5жение на выходе датчика 18, блока 19, выделения модуля, срабатывает пороговый элемент 20 и скачкообразно увеличивается напряжение на выходе блока 23 и рост напряжения на выходе регулятора 6. Под действи0ем этого роста увеличивается напряжение на выходе регулятора 7, преобразователя 3 и тока якоря 1 электродвигателя. Скорость роста тока якоря ограничивается, как и прежде
5 действием связи по напряжению и току возбуждения по цепи-: диодный . мост 17, сумматор 16, блок 15 выделения модуля, регулятор 6 скорости, блок нелинейности 11, датчик 10 тоfка возбуждения.
По мере возрастания частоты вращения якоря 1 электродвигателя на нем возрастает напряжение, что приводит (в соответствии с законами
5 коммутации) к уменьшению допустимого тока якоря. Обеспечение уменьшения величины предельно допустимого якоря обеспечивается увеличением напряжения на выходе блока выделе0ния модуля 22 напряжения на якоре и снижения напряжения на выходе блока 23 перемножения.
При переходе в тормозной режим вновь появляется слабина в канатах и люфты в передачах. При этом рез5ко уменьшается величина статического момента. Его величина даже переходит через ноль, при этом становится равным нулю напряжение на выходе порогового элемента 20 и блока
0 23 перемножения. Резко уменьшается напряжение на выходе регулятора 6 cкopocти т.е. задание на величину тока якоря 1. Следовательно, и в этом случае выбор люфтов в переда5чах и слабни канатов производится с машым значением момента и, следовательно, с пониженной величиной ударов.
После выбора люфтов и слабни
0 пронсходнт скачкообразное увеличенне напряжения на выходе датчика 18, блока 19 выделения модуля, порогового элемента 20, блока 22. Однако напряжение на выходе блока
5 23 меньше, чем после выбора люфтов
и слабин после трогания с места, так как напряжение на первом входе блока 23 меньше благодаря действию отрицательной связи по напряжению по цепи: датчик 6, блок 22 выделения модуля, резистор 21. Ток якорной цепи нарастает с предельно допустимой скоростью.Этим достигается -и соблюдение законов коммутации, определяющих величину допустимого тока якоря, и приближение токовых диаграмм к Оптимальным, что вместе с повышением использования динамических возможностей электродвигателя при напряжениях ниже номинального приводит к повышению быстродействия и снижению потерь в якорных обмотках.
Ограничение тока якоря электродвигателя при выборе Люфтов обеспечивает снижение ударов в передачах. Изменяемая в разных режимах величина предельной скорости изменения тока якоря также обеспечивает максимальное быстродействие электропри вода.
Формула изобретения
Электропривод постоянного тока, содержащий последовательно включенные задающее устройство, регулятор скорости, регулятор тока с подключенными к их входам соответстненно датчиками скорости и. тока и вентильный преобразователь, питающий якорную цепь электродвигателя, преобразователь в цепи обмотки возбуждения электродвигателя, диодный мост, включенный диагональю переменного тока в цепь обратной связи регулятора скорости, сумматор, к одному из входов которого через первый блок нелинейности подключен датчик тока возбуждения, и соеди
иенный с датчиком напряжения первый блок выделения модуля, отличающийся тем, что, с целью снижения ударов в механизме при повышении быстродействия электропривода и улучшения использования коммутационных возможностей электрюдвигателя в него введены последовательно соединенные второй блок нелинейности, датчик статического момента электродвигателя, второй блок выделения модуля и пороговый элемент, а также блок перемножения, второй диодный мост, третий блок нелинейности, третий блок вьщеления модуля, диод и резисторы, при этом входы второго и третьего блоков нелинейности подключены к датчику тока возбужления, выход первого блока, нелинейности через резистор, шунтирующий первый блок вьщеления модуля, соединены со вторым входом сумматора, выход которого подключен к диагонали постоянного тока второго диодного моста, диагональ переменного тока которого включена в цепь обратной связи регулятора тока якоря, выход порогового элемента через второй резистор, шунтированный третьим блоком выделения модуля, входом подключенного к датчику напряжения, соединен с одним из входов блока перемножения, второй вход которого подключен к выходу третьего блока нелинейности, а выход - через диод встречно диагонали постоянного тока первого диодного моста, шунтированной третьим резистором.
Источники информации, принятые во внимание при экспертизе
1.Фишбейн В.Г. Расчет систем подчиненного регулирования ентильного электропривода постоянного тока. М., Энергия, 1972, с. 32-38
2.Авторское свидетельство-СССР 55613, кл. Н 02 Р 5/05, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
| Электропривод постоянного тока | 1981 |
|
SU1022273A1 |
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |
| Устройство для регулирования тока якоря электродвигателя | 1976 |
|
SU656169A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Устройство управления электроприводом постоянного тока с реверсивным регулятором в цепи возбуждения | 1976 |
|
SU574840A2 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1975 |
|
SU752711A1 |
| Устройство для управления электроприводом постоянного тока, выполненное по принципу двухзонного регулирования | 1979 |
|
SU938354A1 |