Изобретение относится к металлургии и может найти применение при управлении положением транспортных механизмов, например, мостов напольно- завалочных машин, кранов, тележек, рольгангов передвижных трубоэлектро- сварочных станов, загрузочно-выцру- зочных машин кольцевых печей в линиях трубопрокатных станов и т.д.
Цель изобретения - повышение производительности и надежности транспортного механизма.
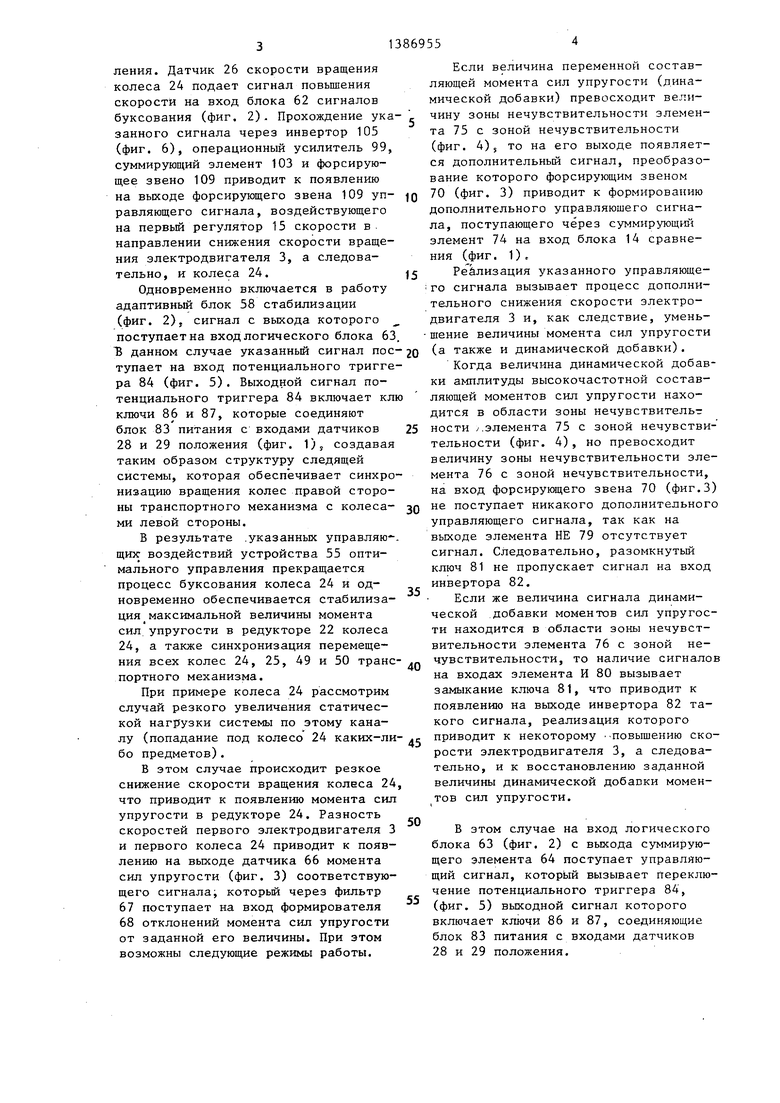
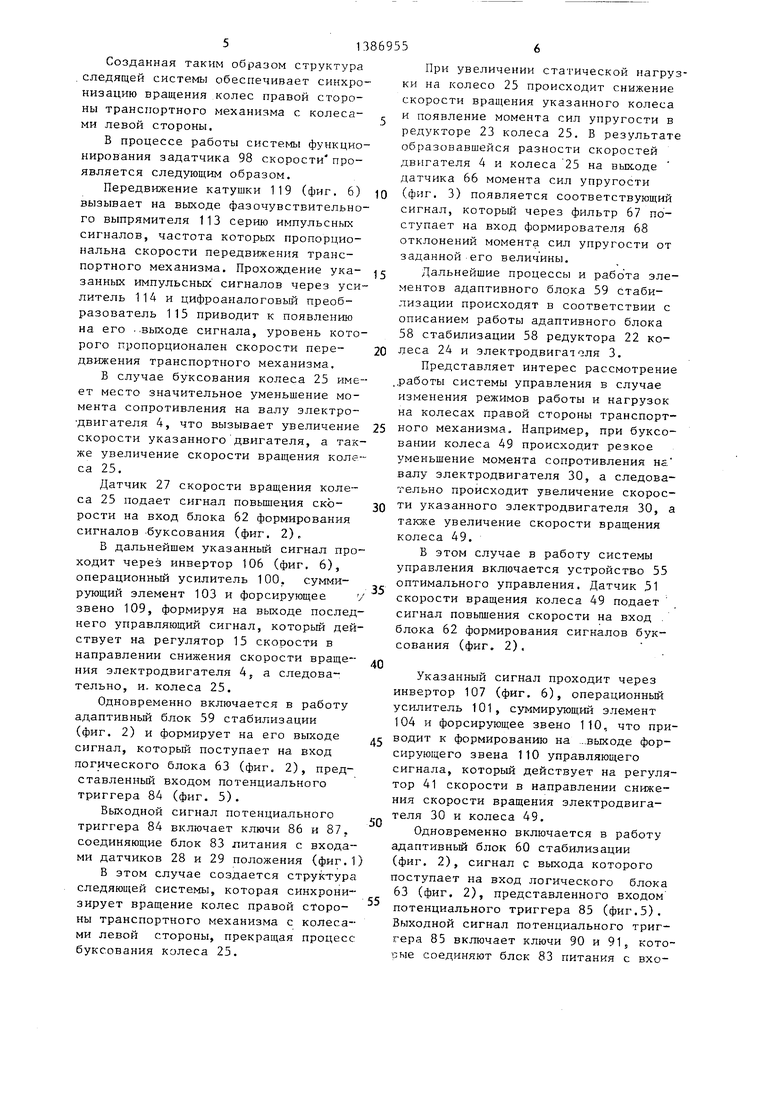
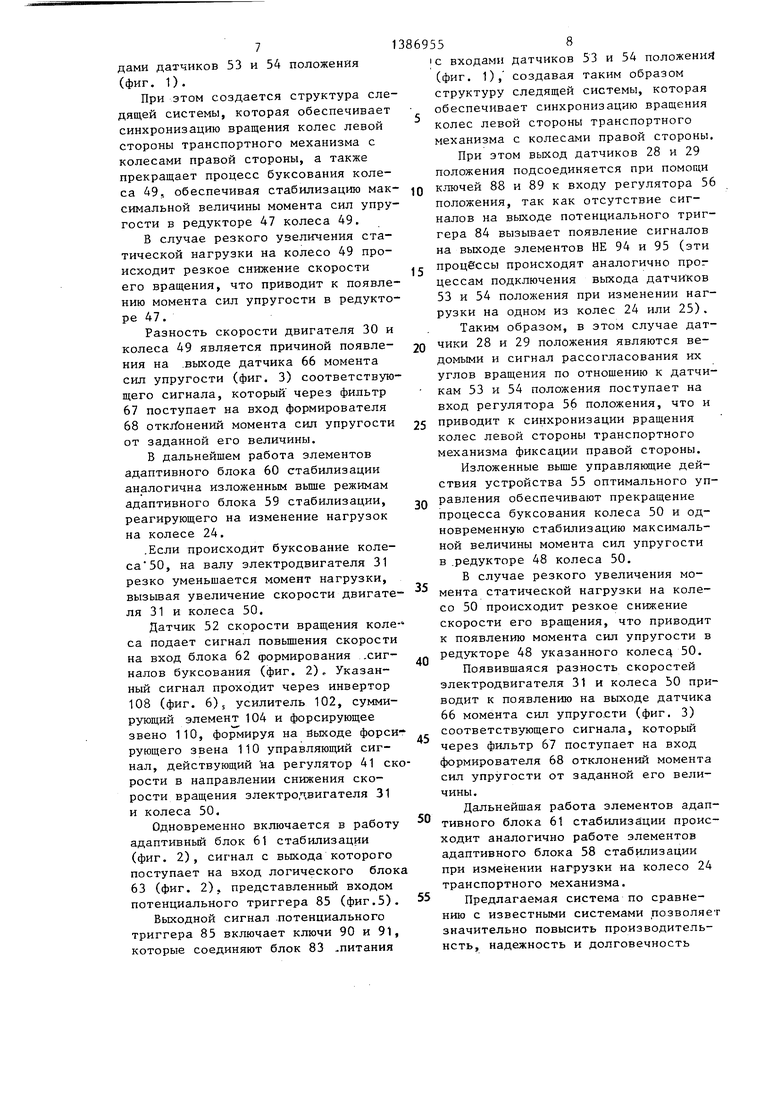
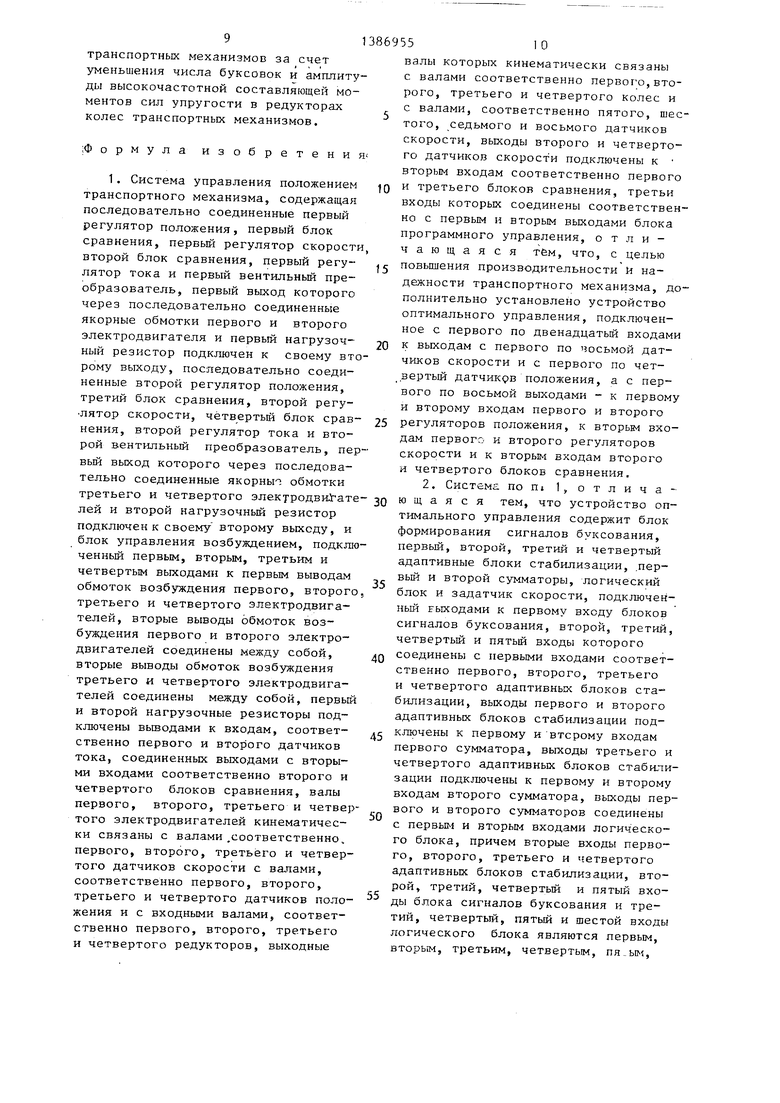
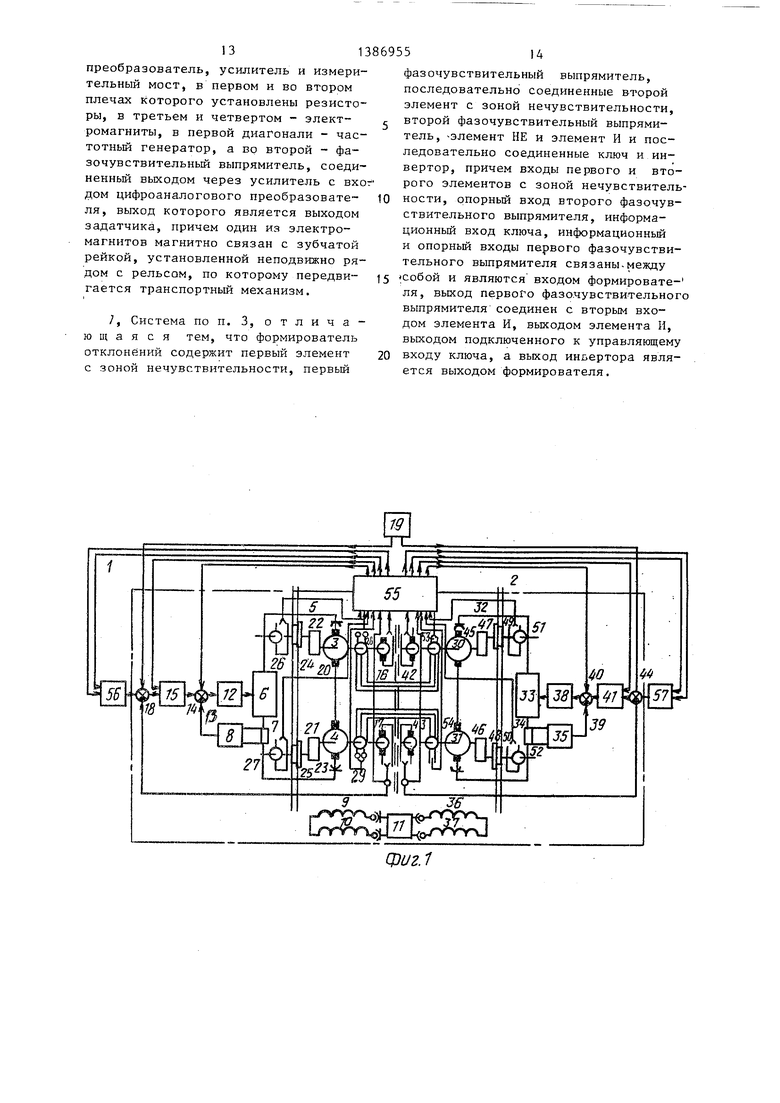
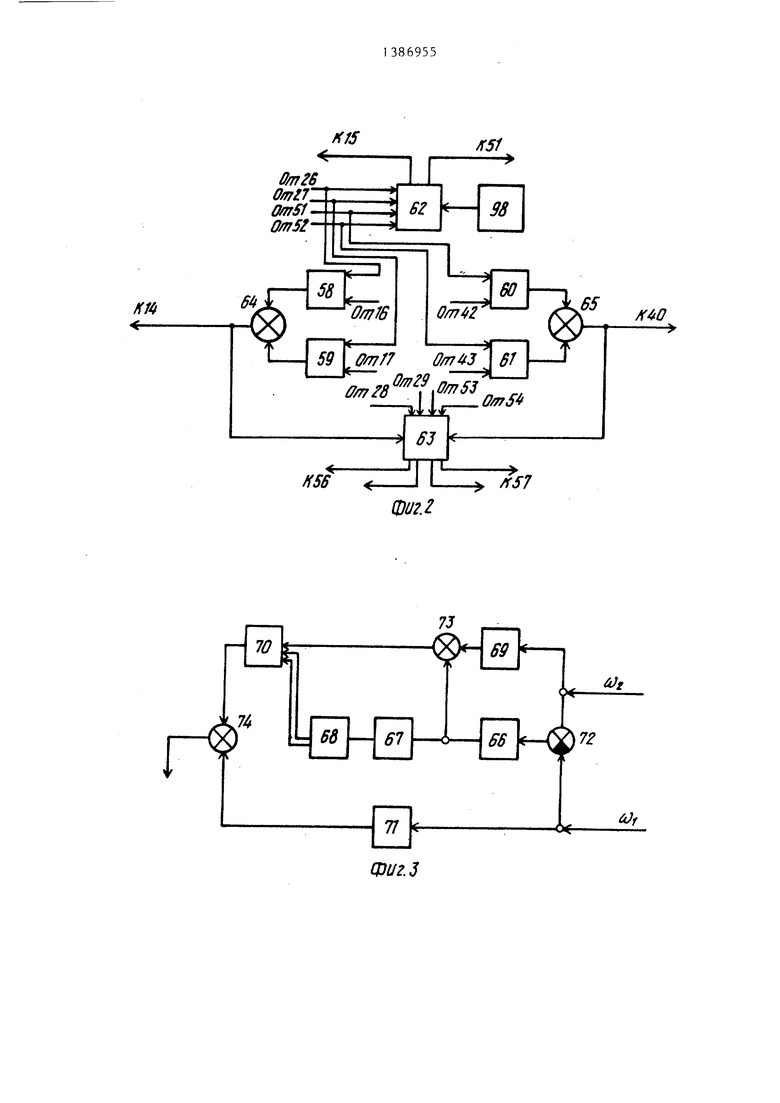
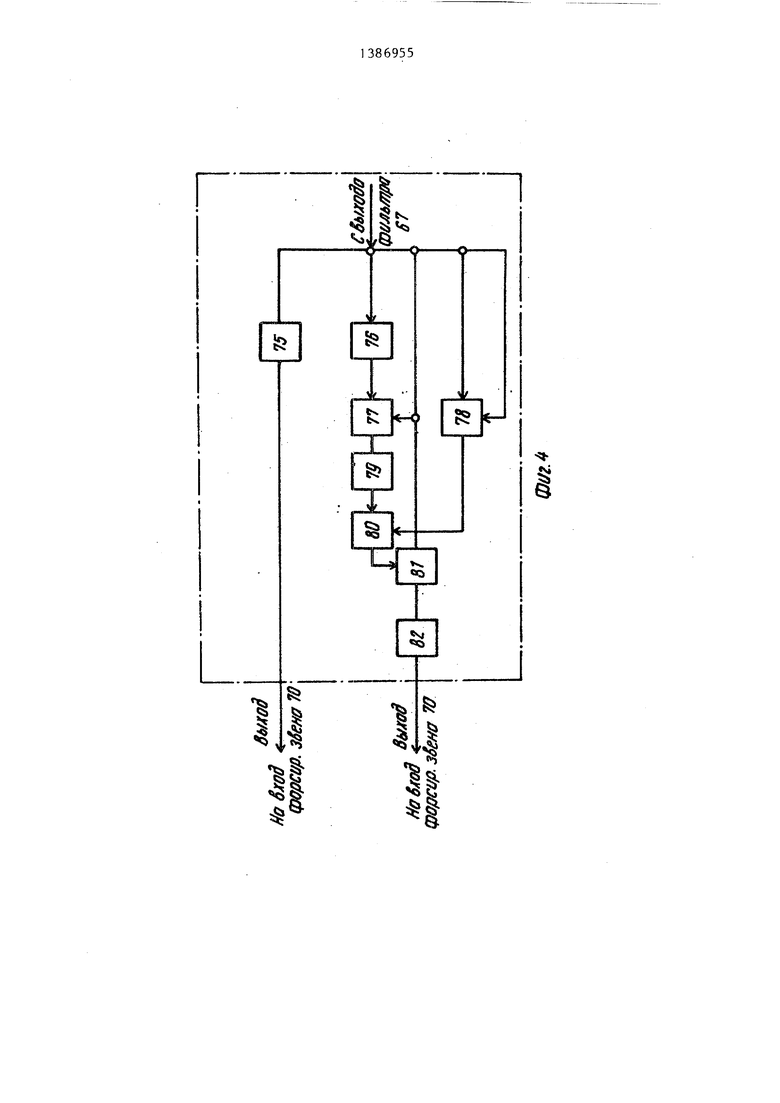
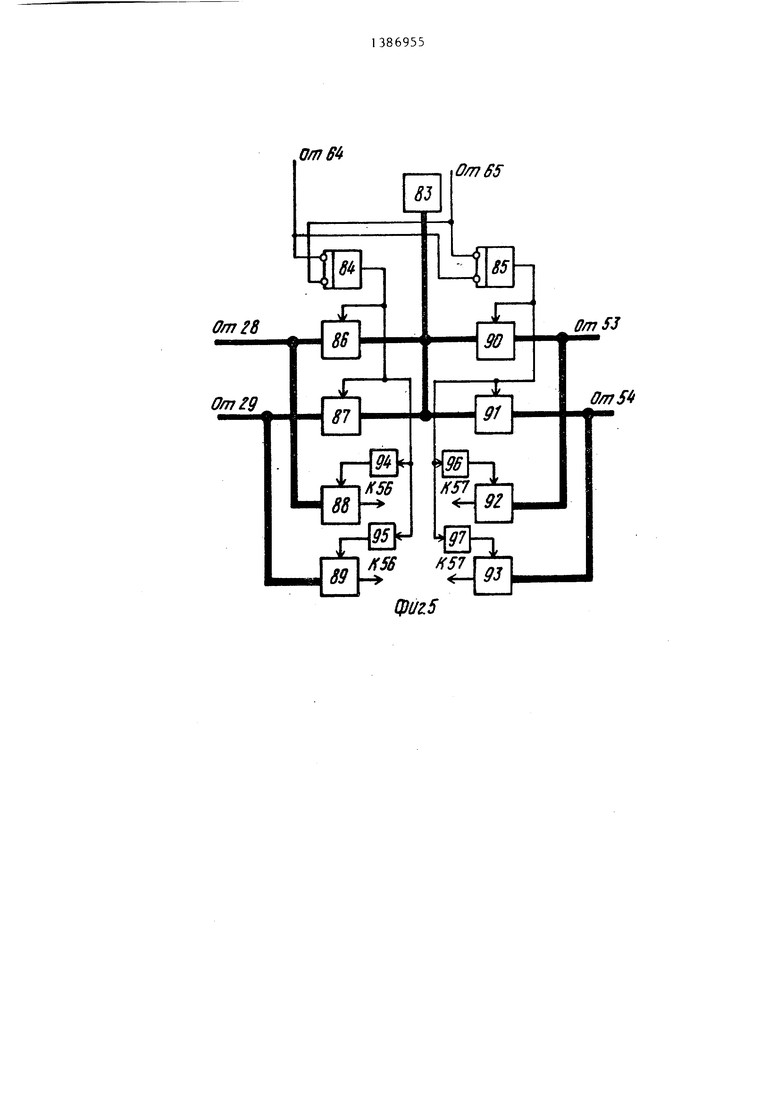
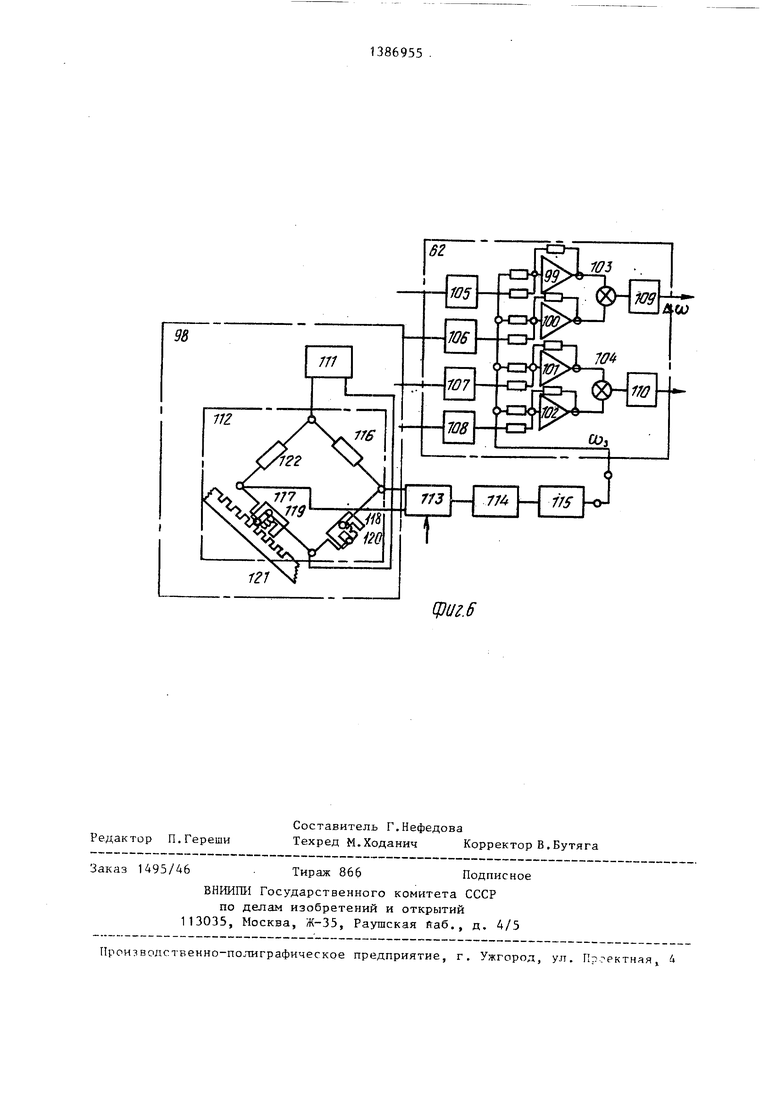
На фиг. 1 представлена структурная схема системы; на фиг. 2 - струк турная схема устройства оптимального управления; на фиг. 3 - структурная схема адаптивного блока стабилизации; на фиг. 4 - структурная схема формирователя отклонений;на фиг.5 - структурная схема логического блока; на фиг. 6 - структурные схемы задат- чика скорости и блока сигналов буксования .
На фиг. 1-6 обозначены первая 1 вторая 2 подсистемы управления положением левой и правой сторон транспортного механизма, первый 3 и второ 4 электродвигатели, цепь 5 якоря первого 3 и второго 4 электродвигателей первый вентильньй преобразователь 6, первый нагрузочный резистор 7, первый датчик 8 тока, обмотки 9 и 10 возбуждения первого 3 и второго 4 электродвигателей, блок 11 управлени возбуждением, первый регулятор 12 тока, отрицательная обратная связь 13 по току, второй элемент 14 сравнения, первый регулятор 15 скорости, первый 16 и второй 17 датчики скорости, первый блок 18 сравнения, бло 19 программного управления, валы 20 и 21 первого 3 и второго 4 электродвигателей, первый 22 и второй 23 редукторы, первое 24 и второе 25 колеса, пятый 26 и шестой 27 датчики скорости, первый 28 и второй 29 датчики положения, третий 30 и четвер- тьй 31 электродвигатели, цепь 32 якоря третьего 30 и четвертого 31 электродвигателя, второй вентильный преобразователь 33, второй нагрузочный резистор 34, второй датчик 35 тока, обмотки 36 и 37 возбуждения третьего 30 и четвертого 31 электродвигателей, второй регулятор 38 тока, отрицательная обратная связь 39 по току, четвертьй блок 40 сравнения, второй регулятор 41 скорости, третий
Q
5 0
5 0
5
0
5
0
5
42 и четвертый 43 датчики скорости, третий блок 44 сравнения, валы. 45 и 46 третьего 30 и четвертого 31 электродвигателей, третий 47 и четвертый, 48 редукторы, третье 49 и четвертое 50 колеса, седьмой 51 и восьмой 52 датчики скорости, третий 53 и четвертий 54 датчики положения, устройство 55 оптимального управления, первый 56 и второй 57 регуляторы положения, первый 58 и второй 59, третий 60 и четвертый 61 адаптивные блоки стабилизации, блок 62 формирования сигналов буксования логический блок 63, суммирующие элементы 64 и 65, датчик 66 моментов сил упругости, фильтр 67, формирователь 68 отклонений, дифференцирующее звено 69, форсируюпще звенья 70 и 71, элемент 72 сравнения, суммирующие элементы 73 и 74,. элементы 75 и 76 с зоной нечувствительности, фозочувст- вительные выпрямители 77 и 78, элемент НЕ 79, элемент И 80, ключ -81,
инвертор 82j блок 83 .питания, потенг- циальные триггеры 84 и 85, ключи 86-93, элементы НЕ 94-97, задатчик 98 скоростиi операционные усилители 99-102, суммирующие элементы 103 и 104, инверторы 105-108, форсирующие звенья 109 и 110, честотный генератор 111, измерительный мост 112. фа- зочувствительный выпрямитель 113 усилитель 114, цифроаналоговьй преобразователь 115, резистор 116, электромагниты 117 и 118, катушки 119 и 120, зубчатая рейка 121 и резистор 122
В качестве датчиков положения 28, 29, 53 и 54 могут быть применены сельсины.
Система работает следующим образом.
Б процессе работы системы на входы блоков 18 и 44 сравнения (фиг. 1) с блока 19 программного управления поступает управляющий сигнал, соответствующий заданному закону изменения скорости передвижения. При буксовании одного из колес, например колеса 24, момент сопротивления на валу электродвигателя 3 резко умень- шается в несколько раз, что приводит к увеличению скорости электродвигателя 3, а также к увеличению скорости вращения колеса 24. В этом случае процесс работы системы корректируется устройством 55 оптимального /правгления. Датчик 26 скорости вращения колеса 24 подает сигнал повьшения скорости на вход блока 62 сигналов буксования (фиг. 2). Прохождение ука занного сигнала через инвертор 105 (фиг. 6), операционный усилитель 99, суммирующий элемент 103 и форсирующее звено 109 приводит к появлению на выходе форсирующего звена 109 уп- равляющего сигнала, воздействующего на первый регулятор 15 скорости в направлении снижения скорости вращения электродвигателя 3, а следовательно, и колеса 24.
Одновременно включается в работу адаптивный блок 58 стабилизации (фиг. 2), сигнал с выхода которого поступает на вход логического блока 63 Б данном случае указанньй сигнал пос тупает на вход потенциального триггера 84 (фиг. 5). Выходной сигнал потенциального триггера 84 включает кл ключи 86 и 87, которые соединяют блок 83 питания с входами датчиков 28 и 29 положения (фиг. 1), создавая таким образом структуру следящей системы, которая обеспечивает синхронизацию вращения колес правой стороны транспортного механизма с колеса- ми левой стороны.
В результате .указанных управляющюс воздействий устройства 55 оптимального управления прекращается процесс буксования колеса 24 и одновременно обеспечивается стабилизация максимальной величины момента сил упругости в редукторе 22 колеса 24, а также синхронизация перемещения всех колес 24, 25, 49 и 50 транс портного механизма.
При примере колеса 24 рассмотрим случай резкого увеличения статической нагрузки системы по этому каналу (попадание под колесо 24 каких-либо предметов).
В этом случае происходит резкое снижение скорости вращения колеса 24 что приводит к появлению момента сил упругости в редукторе 24. Разность скоростей первого электродвигателя 3 и первого колеса 24 приводит к появлению на выходе датчика 66 момента сил упругости (фиг. 3) соответствующего сигнала; которьй через фильтр
67поступает на вход формирователя
68отклонений момента сил упругости от заданной его величины. При этом возможны следующие режимы работы.
Q 5
0 5 Q
.
5
5
0
Если величина переменной составляющей момента сил упругости (динамической добавки) превосходит величину зоны нечувствительности элемента 75 с зоной нечувствительности (фиг. 4)5 то на его выходе появляется дополнительный сигнал, преобразование которого форсирующим звеном 70 (фиг. 3) приводит к формированию дополнительного управляющего сигнала, поступающего через суммирующий элемент 74 на вход блока 14 сравнения (фиг. 1).
Ре&лизация указанного управляюще- i го сигнала вызывает процесс дополнительного снижения скорости электродвигателя 3 и, как следствие, умень- шение величины момента сил упругости (а также и динамической добавки).
Когда величина динамической добавки амплитуды высокочастотной составляющей моментов сил упругости находится в области зоны нечувствителы ности /.элемента 75 с зоной нечувствительности (фиг. 4), но превосходит величину зоны нечувствительности элемента 76 с зоной нечувствительности, на вход форсирукщего звена 70 (фиг.З) не поступает никакого дополнительного управляющего сигнала, так как на выходе элемента НЕ 79 отсутствует сигнал. Следовательно, разомкнутый ключ 81 не пропускает сигнал на вход инвертора 82.
Если же величина сигнала динамической добавки моментов сил упругости находится в области зоны нечувствительности элемента 76 с зоной нечувствительности, то наличие сигналов на входах элемента И 80 вызывает замыкание ключа 81, что приводит к появлению на выходе инвертора 82 такого сигнала, реализация которого приводит к некоторому -повышению скорости электродвигателя 3, а следовательно, и к восстановлению заданной величины динамической добапки моментов сил упругости.
В этом случае на вход логического блока 63 (фиг. 2) с выхода суммирующего элемента 64 поступает управляющий сигнал, который вызывает переключение потенциального триггера 84, (фиг. 5) выходной сигнал которого включает ключи 86 и 87, соединяющие блок 83 питания с входами датчиков 28 и 29 положения.
513
Созданная таким образом структура следящей системы обеспечивает синхронизацию вращения колес правой стороны транспортного механизма с колесами левой стороны.
В процессе работы системы функционирования задатчика 98 скорости проявляется следующим образом.
Передвижение катушки 119 (фиг. 6) вызывает на выходе фазочувствительно- го выпрямителя 113 серию импульсных сигналов, частота которых пропорциональна скорости передвижения транспортного механизма. Прохождение указанных импульсных сигналов через усилитель 114 и цифроаналоговый преобразователь 115 приводит к появлению на его ..выходе сигнала, уровень которого пропорционален скорости передвижения транспортного механизма.
В случае буксования колеса 25 имеет место значительное уменьшение момента сопротивления на валу злектро- двигателя 4, что вызывает увеличение скорости указанного двигателя, а также увеличение скорости вращения колеса 25.
Датчик 27 скорости вращения колеса 25 подает сигнал повьшения скорости на вход блока 62 формирования сигналов .буксования (фиг. 2).
В дальнейшем указанный сигнал проходит через инвертор 106 (фиг. 6), операционный усилитель 100. суммирующий элемент 103 и форсирующее звено 109, формируя на выходе последнего управляющий сигнал, которьш действует на регулятор 15 скорости в направлении снижения скорости вращения электродвигателя 4, а следовательно, И- колеса 25.
Одновременно включается в работу адаптивньй блок 59 стабилизации (фиг. 2) и формирует на его выходе сигнал, который поступает на вход логического блока 63 (фиг. 2), представленный входом потенциального
триггера 84 (фиг. 5).
Выходной сигнал потенциального
триггера 84 соединяющие блок ми датчиков
включает ключи 86 и 87.
83 литания с входа- 28 и 29 положения (фиг.1) В этом случае создается структура следяющей системы, которая синхронизирует вращение колес правой сТоро- ны транспортного механизма с колеса-ми левой стороны, прекращая процесс буксования колеса 25.
5
0
5
0
5
0
При увеличении статической нагрузки на колесо 25 происходит снижение скорости вращения указанного колеса и появление момента сил упругости в редукторе 23 колеса 25. В результате образовавшейся разности скоростей двигателя 4 и колеса 25 на выходе датчика 66 момента сил упругости (фиг. 3) появляется соответствующий сигнал, который через фильтр 67 поступает на вход формирователя 68 отклонений момента сил упругости от заданной его величины.
Дальнейшие процессы и рабо та элементов адаптивного блока 59 стабилизации происходят в соответствии с описанием работы адаптивного блока 58 стабилизации 58 редуктора 22 колеса 24 и электродвигателя 3.
Представляет интерес рассмотрение .работы системы управления в случае изменения режимов работы и нагрузок на колесах правой стороны транспортного механизма. Например, при буксовании колеса 49 происходит резкое З меньшение момента сопротивления на валу электродвигателя 30, а следовательно происходит увеличение скорости указанного электродвигателя 30, а также увеличение скорости вращения колеса 49.
В этом случае в работу системы управления включается устройство 55 оптимального управления. Датчик 51 скорости вращения колеса 49 подает сигнал повышения скорости на вход , блока 62 формирования сигналов буксования (фиг, 2).
Указанный сигнал проходит через инвертор 107 (фиг. 6), операционньш усилитель 101, суммирующий элемент
104 и форсирующее звено 110, что приводит к формированию на ..вькоде форсирующего звена 110 управляющего сигнала, который действует на регулятор 41 скорости в направлении снижения скорости вращения электродвигателя 30 и колеса 49.
Одновременно включается в работу адаптивный блок 60 стабилизации (фиг. 2), сигнал с выхода которого
поступает на вход логического блока 63 (фиг. 2), представленного входом потенциального триггера 85 (фиг.5). Выходной сигнал потенциального триггера 85 включает ключи 90 и 91, кото- пые соединяют блок 83 питания с входами датчиков 53 и 54 положения (фиг, 1).
При этом создается структура следящей системы, которая обеспечивает синхронизацию вращения колес левой стороны транспортного механизма с колесами правой стороны, а также прекращает процесс буксования колеса 49, обеспечивая стабилизацию мак- симальной величины момента сил упругости в редукторе 47 колеса 49.
В случае резкого увеличения статической нагрузки на колесо 49 происходит резкое снижение скорости его вращения, что приводит к появлению момента сил упругости в редукторе 47 .
Разность скорости двигателя 30 и колеса 49 является причиной появле- ния на .выходе датчика 66 момента сил упругости (фиг. 3) соответствующего сигнала, который через фильтр
67поступает на вход формирователя
68отклонений момента сил упругости от заданной его величины.
В дальнейшем работа элементов адаптивного блока 60 стабилизации ан алогична изложенным выше режимам адаптивного блока 59 стабилизации, реагирующего на изменение нагрузок на колесе 24.
.Если происходит буксование колеса 50, на валу электродвигателя 31 резко уменьшается момент нагрузки, вызьшая увеличение скорости двигателя 31 и колеса 50.
Датчик 52 скорости вращения колеса подает сигнал повьш1ения скорости на вход блока 62 формирования .сигналов буксования (фиг. 2), Указанный сигнал проходит через инвертор 108 (фиг. 6); усилитель 102, суммирующий элемент 104 и форсирующее звено 110, формируя на выходе форсирующего звена 110 управляющий си1- нал, действующий на регулятор 41 скорости в направлении снижения скорости вращения электродвигателя 31 и колеса 50.
Одновременно включается в работу адаптивный блок 61 стабилизации (фиг. 2), сигнал с выхода которого поступает на вход логического блока 63 (фиг. 2). представленный входом потенциального триггера 85 (фиг.5).
Выходной сигнал потенциального триггера 85 включает ключи 90 и 91, которые соединяют блок 83 .питания
Q
с
0
5
5
0
5
0
5
0
1C входами датчиков 53 и 54 положения (фиг. 1), создавая таким образом структуру следящей системы, которая обеспечивает синхронизацию вращения колес левой стороны транспортного механизма с колесами правой стороны.
При этом выход датчиков 28 и 29 положения подсоединяется при помощи ключей 88 и 89 к входу регулятора 56 положения, так как отсутствие сигналов на выходе потенциального триггера 84 вызывает появление сигналов на выходе элементов НЕ 94 и 95 (эти процессы происходят аналогично прог цессам подключения выхода датчиков 53 и 54 положения при изменении нагрузки на одном из колес 24 или 25).
Таким образом, в этом случае датчики 28 и 29 положения являются ведомыми и сигнал рассогласования их углов вращения по отношению к датчикам 53 и 54 положения поступает на вход регулятора 56 положения, что и приводит к синхронизации вращения колес левой стороны транспортного механизма фиксации правой стороны.
Изложенные выше управляющие действия устройства 55 оптимального управления обеспечивают прекращение процесса буксования колеса 50 и одновременную стабилизацию максимальной величины момента сил упругости в .редукторе 48 колеса 50.
В случае резкого увеличения момента статической нагрузки на колесо 50 происходит резкое снижение скорости его вращения, что приводит к появлению момента сил упругости в редукторе 48 указанного колесу 50.
Появившаяся разность скоростей электродвигателя 31 и колеса 50 приводит к появлению на выходе датчика 66 момента сил упругости (фиг. 3) соответствующего сигнала, который через фильтр 67 поступает на вход формирователя 68 отклонений момента сил упругости от заданной его величины.
Дальнейшая работа элементов адаптивного блока 61 стабилизации происходит аналогично работе элементов адаптивного блока 58 стабилизации при изменении нагрузки на колесо 24 транспортного механизма.
Предлагаемая система по сравнению с известными системами позволяет значительно повысить производитель- нсть, надежность и долговечность
транспортных механизмов за счет уменьшения числа буксовок и амплитуды высокочастотной составляющей моментов сил упругости в редукторах колес транспортных механизмов.
;Формула изобретения
1. Система управления положением транспортного механизма, содержащая последовательно соединенные первый регулятор положения, первый блок сравнения, первый регулятор скорости, второй блок сравнения, первый регулятор тока и первый вентильньш преобразователь, первый выход которого через последовательно соединенные якорные обмотки первого и второго электродвигателя и первый нагрузоч- ный резистор подключен к своему второму выходу, последовательно соединенные второй регулятор положения, третий блок сравнения, второй регу- лятор скорости, четвертый блок срав- нения, второй регулятор тока и второй вентильный преобразователь, пер- вьй выход которого через последовательно соединенные якорные обмотки
138695510
валы которых кинематически связаны с валами соответственно первог о, второго, третьего и четвертого колес и
с валами, соответственно пятого, шестого, седьмого и восьмого датчиков скорости, выходы второго и четвертого датчиков скорости подключены к вторым входам соответственно первого и третьего блоков сравнения, третьи входы которых соединены соответственно с первым и вторым выходами блока программного управления, отличающаяся ТЕМ, что, с целью повышения производительности и надежности транспортного механизма, дополнительно установлено устройство оптимального управления, подключенное с первого по двенадцатый входами к выходам с первого по восьмой датчиков скорости и с первого по чет- вертый датчикрв положения, а с первого по восьмой выходами - к первому и второму входам первого и второго регуляторов положения, к вторьк входам первого и второго регуляторов скорости и к вторым входам второго и четвертого блоков сравнения.
2. Система поп 1, отлича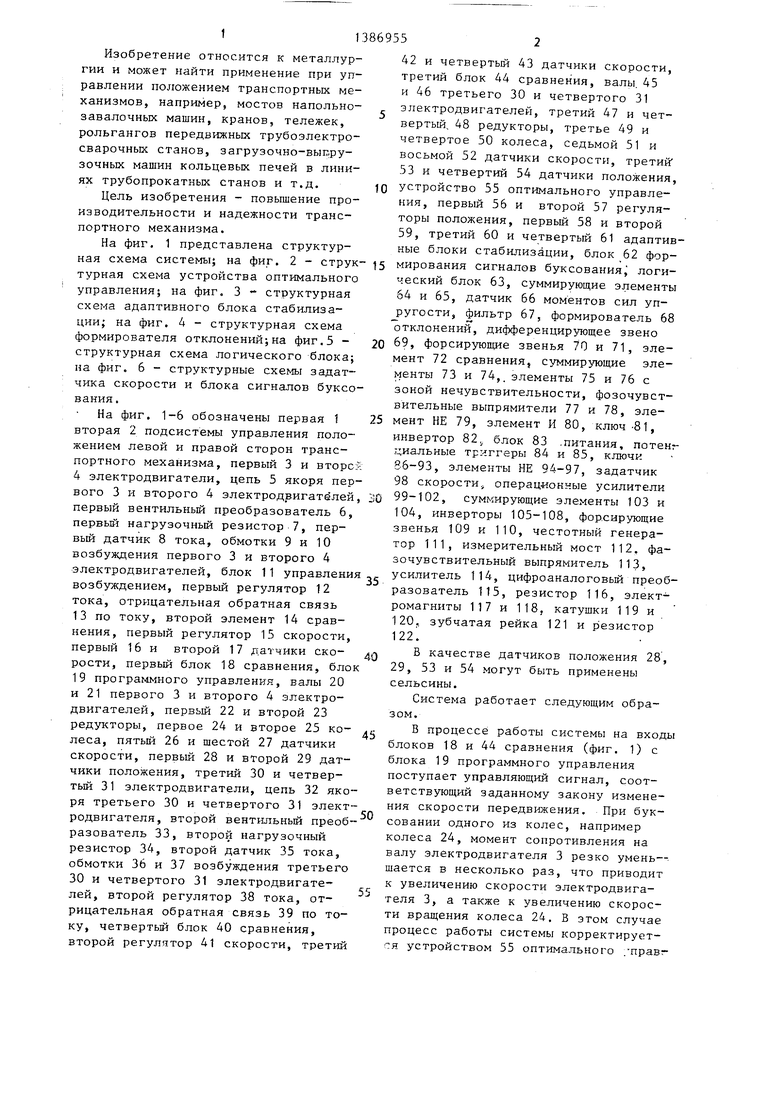
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1985 |
|
SU1409964A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Система адаптивного управления металлорежущим станком | 1981 |
|
SU996997A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
Изобретение относится к области мет лургии и может найти применение при. управлении положением транспортных механизмов, например мостов на- польно-завалочных машин, кранов, тележек, .рольгангов трубоэлектросва- рочных станов, загрузочно-выгрузочных машин кольцевых печей в линиях трубопрокатных станов и т.д. Целью изобретения является повьш1ение производительности и надежности транспортного механизма за счет уменьшения числа буксовок и амплитуды высокочастотной составляющей моментов сил упругости в редукторах колес транспортных механизмов путем сравнения скоростей входного и выходного валов редукторов колес транспортных механизмов с последующим преобразованием полученного сигнала разности в форсирующих звеньях и подачи полученного корректирующего сигнала на входы регулятора скорости и тока. 6 з.п. ф-лы, 6 ил. i С
третьего и четвертого эле.куродви гате- 30 ю щ а я с я тем, что устройство оплей и второй нагрузочньй резистор подключен к своему второму выходу, и блок управления возбуждением, подключенный первым, вторым, третьим и четвертым выходами к первым выводам обмоток возбуждения первого, второго третьего и четвертого электродвигателей, вторые выводы обмоток возбуждения первого и второго электродвигателей соединены между собой, вторые выводы обмоток возбуждения третьего и четвертого электродвигателей соединены между собой, первый и второй нагрузочные резисторы подключены вьшодами к входам, соответственно первого и второго датчиков тока, соединенных выходами с вторыми входами соответственно второго и четвертого блоков сравнения, валы первого, второго, третьего и четвертого электродвигателей кинематически связаны с валами .соответственно. первого, второго, третьего и четвертого датчиков скорости с валами, соответственно первого, второго, третьего и четвертого датчиков положения и с входными валами, соответственно первого, второго, третьего и четвертого редукторов, выходные
5
0
5
0
5
тимального управления содержит блок формирования сигналов буксования, первый, второй, третий и четвертый адаптивные блоки стабилизации, ,пер- вьй и второй сумматоры, логический блок и задатчик скорости, подключенный рыходами к первому входу блоков сигналов буксования, второй, третий, четвертьй и пятый входы которого соединены с первыми входами соответственно первого, второго, третьего и четвертого адаптивных блоков стабилизации, выходы первого и второго адаптивных блоков стабилизации подключены к первому и второму входам первого сумматора, выходы третьего и четвертого адаптивных блоков стабилизации подключены к первому и второму входам второго сумматора, выходы первого и второго сумматоров соединены с первым и вторым входами логического блока, причем вторые входы первого, второго, третьего и четвертого адаптивных блоков стабилизации, второй, третий, четвертый и пятый входы блока сигналов буксования и третий, четвертый, пятый и шестой входы логического блока являются первым, вторым, третьим, четвертьм, пя.-Ь№,
шестым, седьмым, восьмым, девятым, десятым, одиннадцатым и двенадцатым входами устройства, а первый, второй третий и четвертый выходы логическо го блока, первьш . и.второй выходы блока сигналов буксования и выходы первого и второго сумматоров являются первым, вторым, третьим, четвертым, пятым, шестым, седьмым и вось- мым выходами устройства.
первому и второму входам первого фор- зО налов буксования содержит первое
сирующего звена, соединенного третьим входом с выходом первого суммирующего элемента, а выходом - с первым входом второго суммирующе)о элемента, вторым входом подключенного к выходу форсирующего звена, выход дифференцирующего звена соединен с вторым входом первого суммирующего элемента, причем первый и второй входы элемента сравнения и выход второго суммирующего элемента являются первы и вторым входами и выходом блока.
ключей и с входами первого и второго элементов НЕ, подключенных выходами к управляющим входам соответственно третьего и четвертого ключей,выход второго потенциального триггера соединен с управляющими входами пятого и шестого ключей и с входами третьего и четвертого элементов НЕ, подключенных к управляющим входам седьмого и восьмого ключей, выход блока питания соединен с информационными входами первого, второго, пятого и шестого ключей, выходы которых под- ключёйы к информационным входам соответственно третьего, четвертого, седьмого и восьмого ключей, причем первые входы первого и второго потен ,циальных триггеров и информационные входы третьего, четвертого, и восьмого ключей являются первым, вторым, третьим, четвертым, пятым и шестым входами логического блока, а выходы третьего, четвертого, седьмого и восьмого ключей являются первым вторым, третьим и четвертым выходами блока,
5
0
5
второе форсирующие звенья, первый и второй суммируюшие элементы, первый, второй, третий и четвертый суммирующие операционные усилители и первый, второй, третий и четвертьй инверторы, соединенные выходами с первыми входами соответственно первого, второго, третьего и четвертого операционных усилителей, вторые входы которых соединены между собой, входы первого суммирующего элемента подключены к выходам первого и второго операцион- ных усилителей, а выход - к входу первого форсирующего звена, входы второго суммирующего элемента подключены к выходам третьего и четвертого операционньк усилителей, а выход - к входу второго форсирующего звена, причем первьй вход первого операционного усилителя и входы первого, второго, третьего и четвертого инверторов являются первым, вторым, третьим, четвертым и пятым входами блока, а .выходы первого и второго форсирующих звеньев являются выходами блока.
131
преобразователь, усилитель и измерительный мост, в первом и во втором плечах которого установлены резисторы, в третьем и четвертом - электромагниты, в первой диагонали - частотный генератор, а во второй - фа- зочувствительный выпрямитель, соеди- ненньш выходом через усилитель с вхо дом цифроаналогового преобразователя, выход которого является выходом
задатчика, причем один из электромагнитов магнитно связан с зубчатой рейкой, установленной неподвижно рядом с рельсом, по которому передвигается транспортный механизм.
/, Система по п. 3, отличающаяся тем, что формирователь отклонений содержит первый элемент с зоной нечувствительности, первый
14
фазочувствительный выпрямитель, последовательно соединенные второй элемент с зоной нечувствительности, второй фазочувствительный выпрямитель, -элемент НЕ и элемент И и последовательно соединенные ключ и инвертор, причем входы первого и второго элементов с зоной нечувствительности, опорный вход второго фазочув- ствительного выпрямителя, информационный вход ключа, информационньм и опорный входы первого фазочувстви- тельного выпрямителя связаны-между
собой и являются входом формировате- ля, выход первого фазочувствительного выпрямителя соединен с вторым входом элемента И, выходом элемента И, выходом подключенного к управляющему
входу ключа, а выход инвертора является выходом формирователя.
фиг.1
f(J5
/(51
Фиг.З
Г
,
.OffjBU
От 65
От S3
OmS
фиг.5
№/
| Следящая система | 1977 |
|
SU732807A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электротехническая промышленность, сер | |||
| Электропривод, 1983, № 8 (118), с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Ключев В.И | |||
| и Терехов В.М | |||
| Элект-. | |||
| ропривод и автоматизация общепромышленных механизмов | |||
| - М.: Энергия, 1980, с | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
