5 двигателя. Цепь управления возбуждением двигателя состоит из эадат- чика 6 управляющего сигнала, управляемого ключа И 22, задатчика 8 интенсивности, регулятора частоты вращения (PMBl 9, регулируемого блока ограничения (БО) Ю, регулятора 11 тока якоря, регулятора 12 тока воз- буждения и вентильного возбудителя 13 генератора. Кроме того, в цепь угг равления включены задатчик 14 тока возбуждения,- реверсор 15, регулятор 16 мощности, сумматор 17, регулятор 18 тока возбуждения, блок 19 определения режима работы, датчик частоты вращения (ДЧВ) 20 и датчик 21 тока : возбуждения, датчик 24 тока якоря, датчик 28 тока возбуждения генератора. Введение порогового элемента (ПЭ) 29 и управляемого блока переИзобретение относится к электротехнике и касается систем регулиро- .вания частоты вращения и мощности электродвигателей постоянного тока, применяемых в различного рода транспортных установках, например на судах .
Цель изобретения - улучшение энергетических показателей электропри- вода.
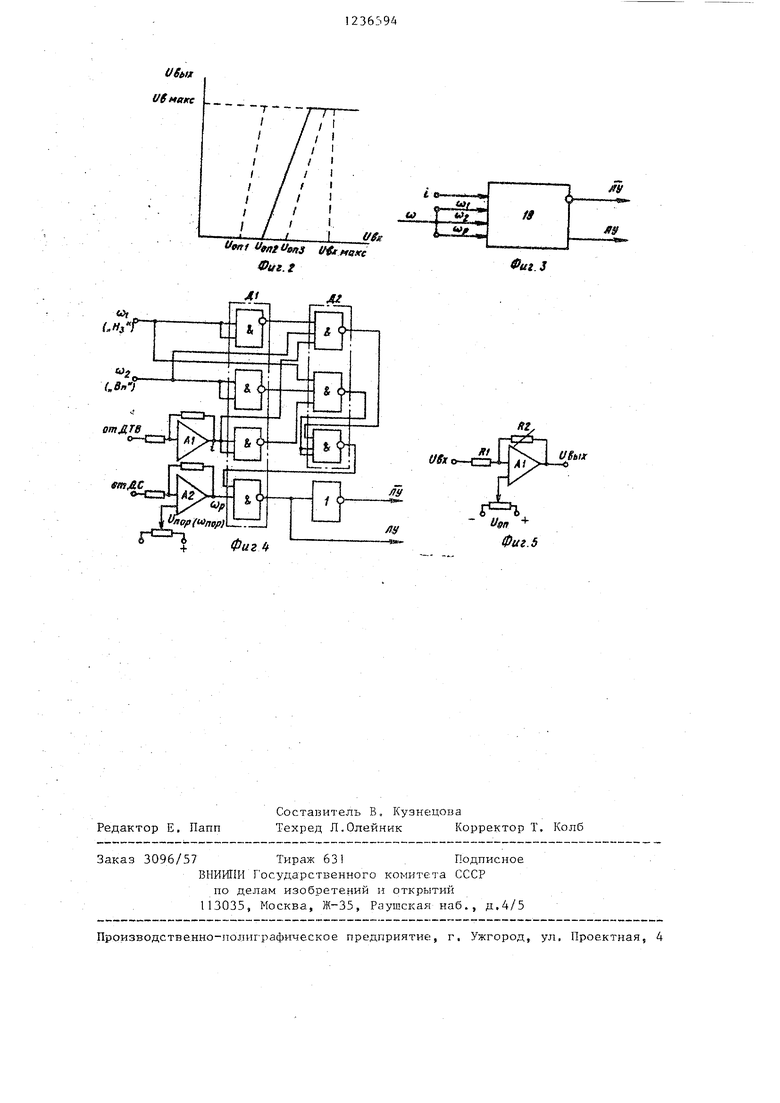
На фиг,1 представлена блок-схема электропривода; на фит.2 - характеристика пороговых устройств; на фиг.З- схема подключения сигналов блока определения режима работы; на фиг.4 вариант реализации блока определения режима работы; на фиг.5 - вариант реализации порогового устройства,
Электропривод содержит электродвигатель 1 постоянного тока, якорная обмотка которого через вентильный преобразователь 2 подлючена к синхронному генератору 3, а обмотка 4 возбуждения - к возбудителю 5 двигателя , включенные в цепь управления возбуждением синхронного генератора последовательно соединенные задатчик 6 управляющего сигнала, управляемый ключ 7, задатчик 8 интенсивности,
ключения (УБП) 30, подключение коммутируемых входов к ДЧВ 20 и датчику 25 мощности, а выхода к входу РЧВ 9 обеспечивает оптимальные режимы работы дйигателя за счет поддержания мощности в любом диапазоне регулирования и защиты от перегрузки. Основное регулирование режимов работы двигателя осуществляется по каналу возбуждения генератора. Для обеспечения режима регулирования на вход РЧБ 9 подается от УБП 30 либо сигнал мощности, потребляемой двигателем, от ДМ 25, либо сигнал частоты вращения ДЧВ 20. Точка переключения закон управления определяется настройкой ПЭ 29. Ограничение выхода РЧВ 9 осуществляется ВО 10 по сигналу функционального преобразоватля 27 , 5 ил.
регулятор 9 частоты вращения с включенным в цепь его обратной связи регулируемым блоком 10 ограничения, регулятор 11 тока якоря, регулятор 12 тока возбуждения генератора и вентильный возбудитель 13 генератора, включенные в цепь управления возбуждением электродвигателя задатчик 14 тока возбуждения, реверсор 15, регулятор 16 мощности, сумматор 17 и регулятор 18 тока возбуждения электродвигателя, блок 19 определения режима работы, входы которого соединены с задатчиком 6 управляющего сигнала, датчиком 20 частоты вращения и датчиком 21 тока возбуждения электродви- гателя,, а выход - с управляющими входами управляемых ключей 5 один из которьо . ключ 7, а другой ключ 22, включенный между входом сум гатора 17 и выходом порогового элемента 23, вход которого подключен к выходу датчика 24 тока якоря, датчик 25 мощности, вькод которого через второй пороговый элемент 26 соедине н с входом регулятора 16 мощности,при этом управляющий вход регулируемого блока 10 ограничения связан через функциональный преобразователь 27 с датчиком 20 частоты вращения, входы регулятора 11, 12 и 18 тока якоря, .тока
31
возбуждения генератора и тока возбуждения электродвигателя соединены соответственно с датчиками 24, 28 и 21 соответственно тока якоря, тока возбуждения генератора и тока возбуж- дения электродвигателя, а управляющий вход реверсора 15 соединен с выходом задатчика 6 управляющего сигнала,
Электропривод содержит также тре- тий пороговый элемент 29 и управляемый блок 30 переключения, коммутируемые входы которого соединены соответственно с датчиком 20 частоты вращения и датчиком 25 мощности, выход- с входом регулятора 9 частоты вращения, а управляющий вход через пороговый элемент 29 подключен к выходу задатчика 8 интенсивности.
Датчик 25 мощности представляет собой блок перемножения, входы которого соединены с датчиком 24 тока якоря и датчиком 31 напряжения.
Блок 30 переключения представляет собой контактное или бесконтактное устройство, Б конкретной реализации это узел из двух реле, обмотки которых подключены к источнику напряже- ршя при включении контактов Вперед Назад задатчика управляющего сигнала, а контакты реле подключают на вход регулятора 16 мощности сигнал задания тока возбуждения от задатчика 14,
Блок 30 переключения может быть реализован также з а счет введения в канал регулирования тока возбуждения инвертирующего операционного усилителя по команде Назад от задатчика управ- ляющего сигнала.
Пороговые элементы 23, 26 и 29 представляют собой элементы с регулируемой установкой и коэффициентом усиления К1, К2, КЗ (фиг,2). Реализу ются они на операционном усилителе, Вариант реализации представлен на фиг,5,
Функциональный преобразователь 27
осуществляет ограничение выходного
сигнала регулятора 9 частоты вращения (мощности в функции частоты вращения электродвигателя. Конкретная настройка его определяется техническими характеристиками системы. Реализуется 55 он на операционном усилителе с регулируемым начальным значением выходного напряжения и несколькими ступенч
5
5
20
35
5
30
0
5
5944
мн изменения коэффициента усиления в цепи обратной связи.
Электропривод работает следующим образом.
Режим работы электродвигателя 1 задается задатчиком 6 управляющего сигнала.
Сигнал задания через управляемый ключ 7 поступает на задатчик 8 интенсивности и далее на регулятор 9 частоты врап;ения (мощности) , на регулятор 11 тока якоря, регулятор 12 тока возбуждения генератора, откуда сигнал управления поступает на систему управления вентильного возбудителя 13 генератора 3, осуществляя при реализации принципа последовательной коррекции регулирование величины нап- ря :ения синхронного генератора 3, а значит,и величины напряжения питания якоря электродвигателя I.
Вторым каналом регулирования является цепь возбуждения электродвигателя , в которой осуществляется иэме- ,нение направления и величины тока возбуждения посредством реверсивного возбудителя 5, Ввиду больщой мощности такого типа установок, отсутствия жестких требований к динамическим характеристикам и в связи с жесткими требованиями по весогабаритным показателям, реверс осуществляется по цепи возбуждения.
Сигнал управления ( номинального значения тока возбуждения) поступает на вход системы управления возбудителя 5 от задатчика 14.тока возбуждения через реверсор 15, лятор 16 мощности, сумматор 17 и регулятор 18 тока возбуждения, 1
Реверсор 15 управляется сигналом
от задатчика 6 управляющего сигнала и, в зависимости от требуемого направления вращения (вперед, назад), подключает на вход регулятора 16 мощности сигнал задания тока возбуждения соответствующего знака и постоянной величины, соответствующей номинальному значению тока возбуждения.
При превьт1ении величиной мощности допустимьк значений, что определяется настройкой порогового элемента 26, на регулятор 16 мощности постугшет сигнал на снижение тока возбуждения двигателя,
В режиме реверса электродвигателя, учитывая специфику транспортных установок, на которых установлен рассматриваемый тип привода, например судов возникает специфичный режим работы электродвигателя, в результате чего ток возбуждения двигателя изменяет свой знак по сигналу с эадатчика управляющего, сигнала, а направление вращения электродвигателя сохраняется прежним из-за того., что движущееся по инерции судно вращает электродвигатель из-за рабочего механизма (гребного винта) в режиме гидротур- би1гы. В этом случае электродвигатель работает в режиме динамического торможения по цепи якоря через вентили выпрямителя 2, и ток электродвигателя может достигать недопустимо больших значений, Для ограничения величины тока в этом режиме предусмотрен блок 19 определения режима работы, на входы которого поступают сигналы от задатчика управляющего сигнала ; Вперед, Назад) и сигналы знака тока возбуждения двигателя от датчика 2 тока возбуждения и направления вращения и величины скорости электродвигателя от датчика 20 частоты вращения, преобразовывающего сигнал от тахогенератора.
В случае несовпадения требуемых знаков тока возбуждения и направления вращения блок 19 определения режима работы выдает сигнал на отключение через управляемый ключ 7 сигнала задания тока возбуждения генератора (а значит напряжения на выходе генератора), и подключение через управляемый ключ 22 контура ограничени тока возбуждения (а значит и тока цепи якоря электродвигателя),
Ниже поясняется работа блока 19 определенш режима работы для упрощенного вариа}{та реа.пр зации, когда лгические сигналы задания от поста управления не используются (фиг.З). Здесь I 1, если ток возбулсдення днигателя i
9А
О , 1 О, если 1 5 д О i
СОр О, если .)nop; Wi О, если ЫйО; СО, 1, если Со 0; СОг 0; если 0; сОо 1 если со .
Здесь 0} - частота вращения двигателя; со пор .О пороговое значен1- е частот, вращения, определя- KHJiee момент переключения электропривода на режим протпвовключения; СО, и С02 - дискретные (логические) сигналы от датчика частоты вращения, определяемые направлением т ращения.
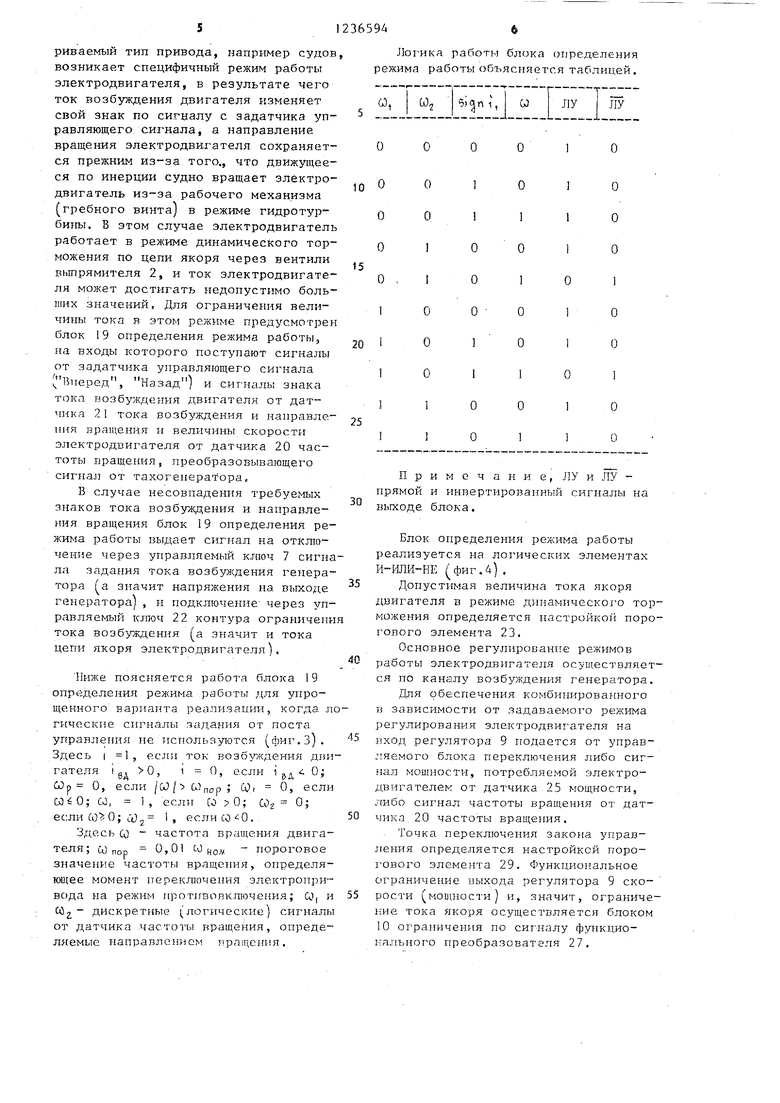
Лог ика работы блока определения режима работы объясняется таблицей.
Примечание, ЛУ и ЛУ - прямой и инвертированный сигналы на выходе блока.
Блок определения релсима работы реализуется на логических элементах Ii-ИПИ-НЕ (фиг.4) .
Допустимая величина тока якоря двигателя в режиьге д}П1амического тор можения определяется настройкой порогового элемента 23,
Основное регулирование режимов работы электродвигателя осуществляется по каналу возбуждения генератора.
Для обеспечения комбинированного в зависимости от задаваемого режима регулирования электродвигателя на вход регулятора 9 подается от управляемого блока переключения сигнал мощности, потребляемой электродвигателем от датчика 25 мощности, либо сигнал частоты вращения от датчика 20 частоты вращения.
Точка переключения закона управ- 1гения определяется настройкой порогового элемента 29. Функциональное ограничение выхода регулятора 9 скорости (мощности) и, значит, ограниче- 1:ие тока якоря осуществляется блоком 10 ограничения по сигналу функцио- ;;ального преобразователя 27.
71
Типовой характеристикой ограничения Является такая характеристика, когда при со О обеспечивается задание тока стоянки двигателя ( 2 IVIOM) затем при изменении частоты вращения до W (0,1 - 0,2)cO,Q ограничение (задание) тока изменяется линейно от
21
чом
до Iц и далее при увели чении со задание тока ограничивается величиной I ц(,„ ,
Использование изобретения в гребных установках обеспечивает поддержание частоты вращения гребного электродвигателя до выхода ГЭУ на ограничение по мощности с регулируемой в функции сигнала задания точкой переключения принципа регулирования, что .в свою очередь обеспечивает хорошие маневренные качества судна при малых значениях частоты вращения гребного электродвигателя, оптимизацию режимов работы энергетической установки по минимуму расхода топлива при ходе на волнении и установившемся движении во льдах, а также обеспечивает режим поддержания мощности отбираемой от первичного двигателя в любом диапазоне регулирования (перестраиваемая установка принципа .регулирования), что обеспечивает защиту первичного двигателя от перегрузки в предельных режимах и стабилизацию мощности первичного двигателя (а значит улучшение условий эксплуатации и надежности).
Формула изобретения
Электропривод с автономным источником питания, содержащий электродвигатель постоянного тока, якорная обмотка которого через вентильный преобразователь подключена к синхронному генератору, а обмотка возбуждения- к возбудителю электродвигателя, включенные в цепь управления возбуждением синхронного генератора последовательно соединенные задатчик управляющего
365948
сигнала, управляемый ключ, задатчик интенсивности, регулятор частоты вращения с включенным в цепь его обратной связи регулируемым блоком огра5 ничения, регулятор тока якоря, регулятор тока возбуждения генератора и вентильный возбудитель генератора, включенные в цепь управления возбуждением электродвигателя задатчик тока
10 возбуждения, реверсор, регулятор мощности, сумматор и регулятор тока возбуждения электродвигателя, блок определения режима работы, входы которого соединены с задатчиком управля15 ющёго сигнала, датчиком частоты вращения и датчиком тока возбуждения электродвигателя, а выход - с управляющими входами управляемых ключей, один из которых упомянутый, а второй
20 включен между входом сумматора и выходом первого порогового элемента, вход которого подключен к выходу датчика тока якоря, датчик мощности, выход которого через второй пороговый
25 элемент соединен с входом регулятора мощности, при этом управляющий вход регулируемого блока ограничения связан через функциональный преобразователь с датчиком частоты вращзния,
30 входы регуляторов тока якоря, тока возбуждения генератора и тока возбуждения электродвигателя соединены соответственно с датчиками тока якоря, тока возбуждения генератора и
JJ тока возбуждения электродвигателя, а управляющий вход реверсора соединен с выходом задатчика управляющего сигнала, отличающийся тем, что, с целью улучшения энергетических
Q показателей, в него введены третий пороговьй элемент и управляемый блок переключения, коммутируемые входы которого соединены соответственно с датчиком частоты вращения и датчиком
мощности, выход - с входом регулятора частоты вращения, а управляющий вход через третий пороговый элемент подключен к выходу задатчика интенсивности.
«W/
Фиг. г
Фиг. 5
Фиг it
USbtx
A,
- Ugn Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод постоянного тока | 1985 |
|
SU1336184A1 |
| Электропривод | 1985 |
|
SU1307522A1 |
| Электропривод | 1981 |
|
SU985911A1 |
| Устройство для регулирования тягового электропривода автономного транспортного средства | 1987 |
|
SU1546307A2 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1986 |
|
SU1403313A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Способ управления тяговым электроприводом в тормозном режиме | 1986 |
|
SU1460765A1 |
Изобретение относится к электротехнике и касается систем регулирования частоты вращения и мощности электродвигателей постоянного тока, Цель изобретения - улучшение энергетических показателей электропривода, Устр-во содержит электродвигатель 1, вентильный преобразователь 2, синхронный генератор 3, обмотку возбуждения 4, подключенную к возбудителю (Л ю 00 с ел QO 
Редактор E. Папп
Составитель В. Кузнецова
Техред Л.Олейник Корректор Т, Колб
Заказ 3096/57 Тираж 631 , Подписное ВНИИГ1И Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д,4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4
| Рукавишников С.Б | |||
| Автоматизированные гребные электрические установки | |||
| -Л.: Судостроение, 1983, с.178-204. |
