Изобретение относится к области компрессоростроения и, в частности, к системам автоматического унравления электромагнитными компрессорами.
Известны электромагнитные компрессоры, содержащие электромагнитную систему с силовыми обмоткамн и ферромагнитным якорем, связанным через штоки с поршнями, а также схему питания и управления, позволяющую регулировать давление в компрессиейной камере за счет изменения частоты колебаний поршней.
Цель изобретения - обеспечение наивыгоднейшего режима сжатия газа в цилиндрах компрессора и исключение режима работы с механическим ударом.
Цель достигается за счет форсажа хода якоря при увеличении нагрузки.
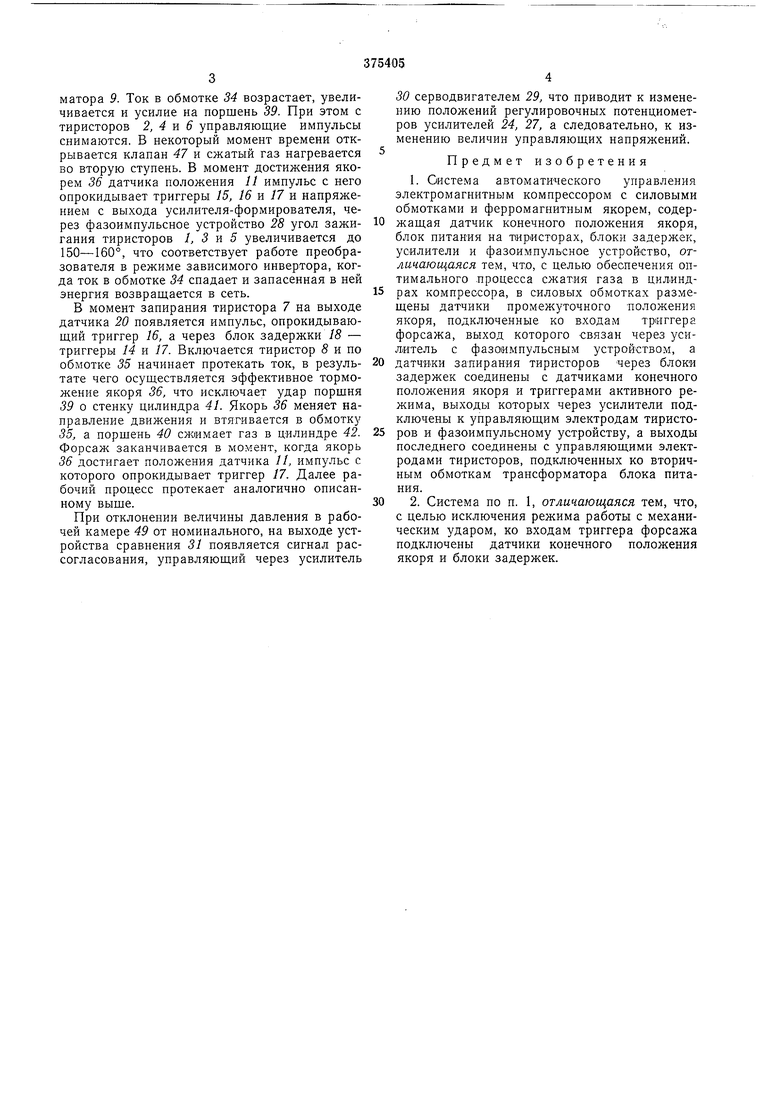
Иа фиг. 1 представлена схема блока питания; на фиг. 2 - блок-схема системы управления; на фиг. 3 - электромеханическая схема компрессора.
Схема питания выполнена на тиристорах /-8 (фиг. 1) с использованием трехфазного трансформатора 9, который позволяет в определенные моменты подавать на силовые обмотки повышеппое напряжение, т.е. форсировать их режим. Блок-схема системы управления состоит из индукционных датчиков положения 10-13 (фиг. 2), триггеров активного режима
14 и 15, отключения 16 и форсажа 17, связанного через блоки задержек 18 к 19 с датчиками запирания 20 и 21 тиристоров 7 и 8, управляемых через усилители-формирователи 22 и 23. Усилители-формирователи 24-27 через фазоимпульспое устройство 28 связаны с тиристорами 1-8 блока питания. Серводвигатель 29, управляющий движками потенциометров усилителей-формирователей 24-27, через свой усилитель 30 питается от схемы сравнения 31, па которую подаются напряжения с датчика давления 32 и источника задающего напряжения 33.
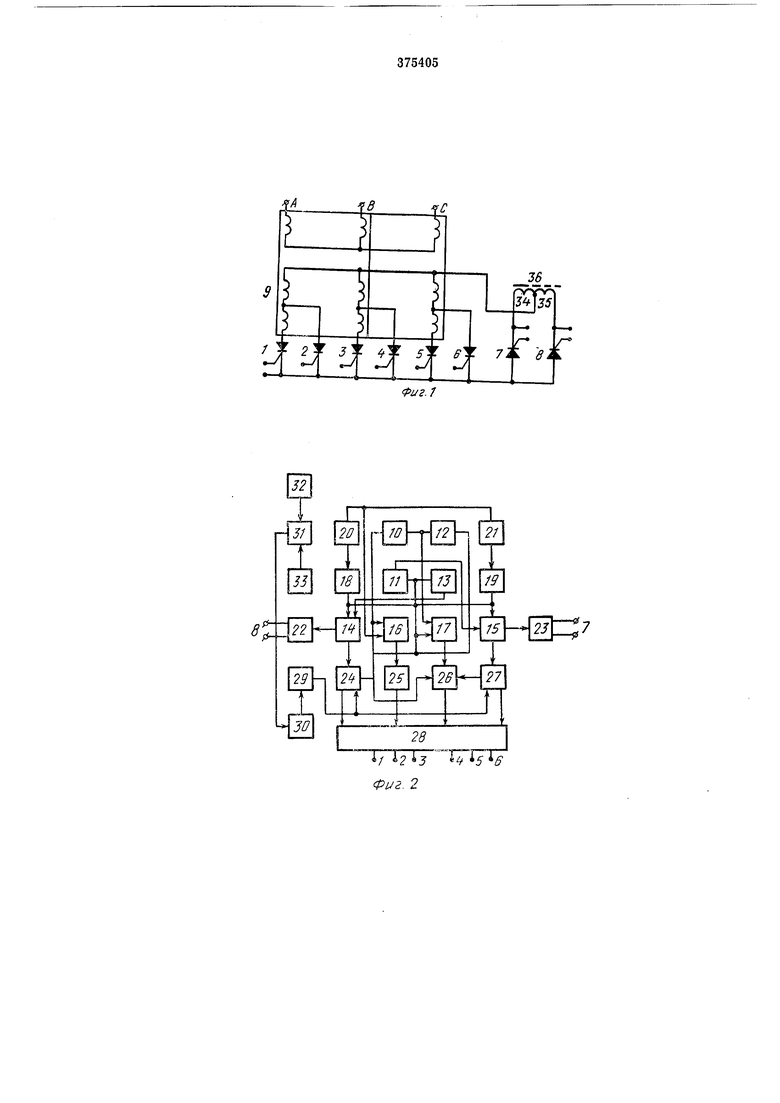
Электромеханическая система компрессора состоит из силовых обмоток 34, 35 (фиг. 3) с ферромагнитным якорем 36, соединенным диамагнитными штоками 37, 38 с поршнями 39, 40 в цилиндрах 41, 42, пружин 43, 44, клапанов всасывания 45, 46 и нагнетания 47, 48.
Рассмотрим принцип действия устройства с момента, когда через тиристор 7 по обмотке 34 протекает ток и якорь 36, втягиваясь в нее, сжимает поршнем 39 газ, находящийся в цилиндре 41. При достижении якорем датчика 10, с датчика снимается имнульс, опрокидывающий триггер форсажа 17, и на фазоимпульсное устройство 28 поступает сигнал с усилителя 26, который определяет угол включения тиристоров 1, 3 и 5, что позволяет питать обмотку 34 повыщенным напряжением от трансформатора 9. Ток в обмотке 34 возрастает, увеличивается и усилие на поршень 39. При этом с тиристоров 2, 4 и 6 управляющие импульсы снимаются. В некоторый момент времени открывается клапан 47 и сжатый газ нагревается во вторую ступень. В момент достижения якорем 36 датчика положения 11 импульс с него опрокидывает триггеры 15, 16 к 17 и напряжением с выхода усилителя-формирователя, через фазоимпульсное устройство 28 угол зажигания тиристоров 1, 3 и 5 увеличивается до 150-160°, что соответствует работе преобразователя в режиме зависимого инвертора, когда ток в обмотке 34 спадает и запасенная в ней энергия возвращается в сеть.
В момент запирания тиристора 7 на выходе датчика 20 появляется импульс, опрокидывающий триггер 16, а через блок задержки /8 - триггеры 14 и 17. Включается тиристор 8 и по обмотке 35 начинает протекать ток, в результате чего осуществляется эффективное торможение якоря 36, что исключает удар порщня 39 о стенку цилиндра 41. Якорь 36 меняет направление движения и втягивается в обмотку 35, а поршень 40 сжимает газ в цилиндре 42. Форсаж заканчивается в момент, когда якорь 36 достигает положения датчика //, импульс с которого опрокидывает триггер 17. Далее рабочий процесс протекает аналогично описанному выще.
При отклонении величины давления в рабочей камере 49 от номинального, на выходе устройства сравнения 31 появляется сигнал рассогласования, управляющий через усилитель
30 серводвигателем 29, что приводит к изменению положений регулировочных потенциометров усилителей 24, 27, а следовательно, к изменению величин управляющих напряжений.
Предмет изобретения
1. Система автоматического управления электромагнитным компрессором с силовыми обмотками и ферромагнитным якорем, содержащая датчик конечного положения якоря, блок питания на Т1иристорах, блоки задержек, усилители и фазоимпульсное устройство, отличающаяся тем, что, с целью обеспечения оптимального .процесса сжатия газа в цилиндpax компрессора, в силовых обмотках размещены датчики промежуточного положения якоря, подключенные ко входам триггера форсажа, выход которого связан через усилитель с фазоимпульсным устройством, а
датчики запирания тиристоров через блоки задержек соединены с датчиками конечного положения якоря и триггерами активного режима, выходы которых через усилители подключены к управляющим электродам тиристоров и фазоимпульсному устройству, а выходы последнего соединены с управляющими электродами тиристоров, подключенных ко вторичным обмоткам трансформатора блока питания.
2. Система по п. 1, отличающаяся тем, что, с целью исключения режима работы с механическим ударом, ко входам триггера форсажа подключены датчики конечного положения якоря и блоки задержек.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КОМПРЕССОРОМ | 1973 |
|
SU387139A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КОМПРЕССОР | 1972 |
|
SU349801A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХОБМОТОЧНЫМ СОЛЕНОИДНЫМ ДВИГАТЕЛЕМ | 1973 |
|
SU391691A1 |
| ЭЛЕКТРОПРИВОД УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2017319C1 |
| Система автоматического регулирования рабочим органом электромагнитного перфоратора | 1971 |
|
SU470797A1 |
| Устройство для управления реверсивным тиристорным широтноимпульсным преобразователем | 1976 |
|
SU657568A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1975 |
|
SU743154A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИЛОВЫМ ТИРИСТОРОМ ИМПУЛЬСНОГО РЕГУЛЯТОРА ТЯГОВОГО ДВИГАТЕЛЯ | 1970 |
|
SU269973A1 |
| Устройство для управления тяговым электроприводом постоянного тока транспортного средства | 1984 |
|
SU1270039A1 |
| Высокоскоростной вентильный электродвигатель | 1982 |
|
SU1270844A2 |
V А Aj Фиг. 2
АО 4 J4#/55 (,,,
375405
rff
4-547
Jf
