(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ МАШИНОЙ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ Изобретение относится к электротехнике и может применяться в горно промышленности при создании мощных электромагнитных машин ударного дей ствия, в строительной технике при з бивании свай, разработке мерзлых грунтов и т.д. Известны двухкатушечные электромагнитные машины возвратно-поступательного движения, содержащие элект магниты, силовые тиристоры, концевы датчики положения, ферромагнитный якорь, направляющую трубу 1. Недостаток таких машин состоит в том, что с увеличением мощности машин увеличиваются размеры электро магнитов и время их работы, что ведет к их быстрому нагреванию. Наиболее близким к описываемому изобретению по технической сущности и достигаемому результату являет ся устройство для управления многокаскадной машиной возвратно-поступательного движения, содержащее дат чики положения, электромагниты, уст новленные на направляющей трубе, в которой расположен подвижный ферромагнитный якорь. Коммутация движени якоря в различных -направлениях осуществляется с помощью триггеров, согласующего устройства и формирователя импульсов, открывающих силовые тиристоры 2. Недостатком данного устррйства явявляется его сложность из-за большого количества входящих в него узлов, трудность согласования их во время работы и недостаточная надежность в работе. Цель изобретения - повьпиение надежности работы устройства. Указанная цель достигается тем, что в устройство для управления электромагнитной машиной возвратнопоступательного движения с п электромагнитами введены два трансформатора, каждый из которых имеет п-1 вторичных обмоток с включенными в них диодами. В первичные обмотки трансформаторов включены диодные мосты с тиристорами в диагонали, управляющие цепи которых подключены к содержащим диоды вторичным обмоткам концевых датчиков положения. Каждая из вторичных обмоток указанных трансформаторов, за исключением одной, первого трансформатора, соединена параллельно с соответствующей вторичной обмоткой второго трансформатора.
се вторичные обмотки подключены введенным конденсаторам в цепях правления силовых тиристоров. Управяющие цепи коммутирующих тиристоров одключены к содержащим диоды вторичfcJM обмоткам промежуточных датчиков оложения. Для запирания силовых иристоров, включенных последовательно обмоткам электромагнитов, к их анодам подключены конденсаторы.
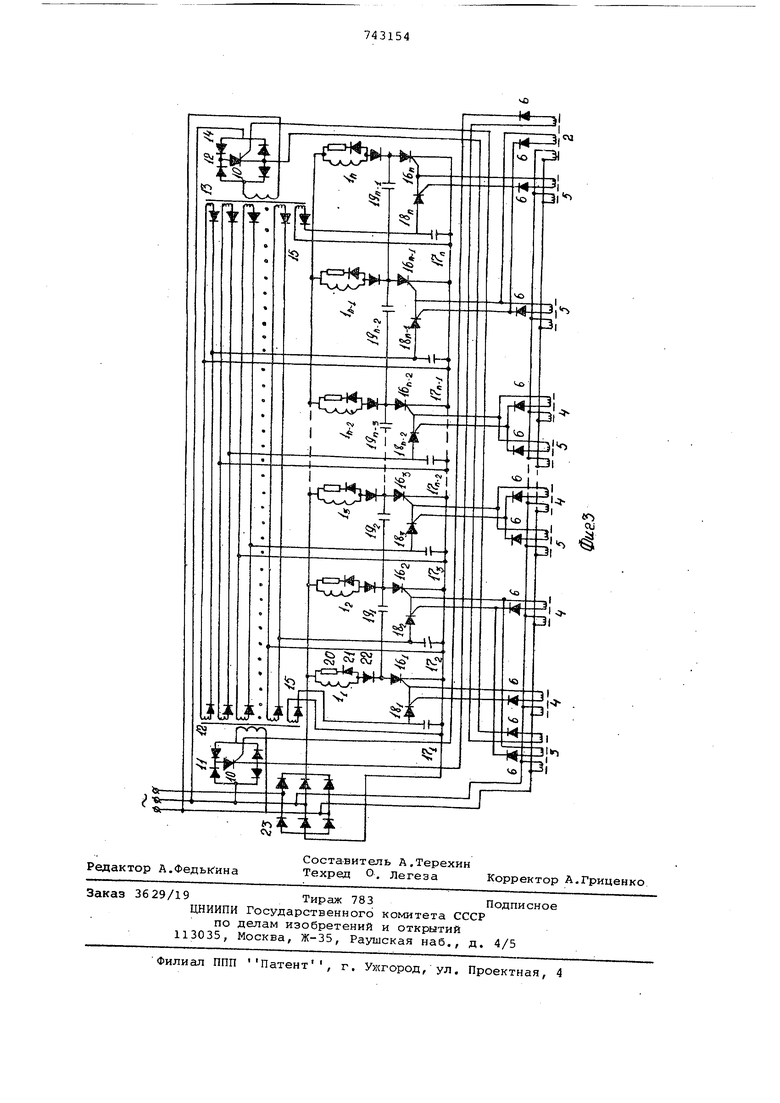
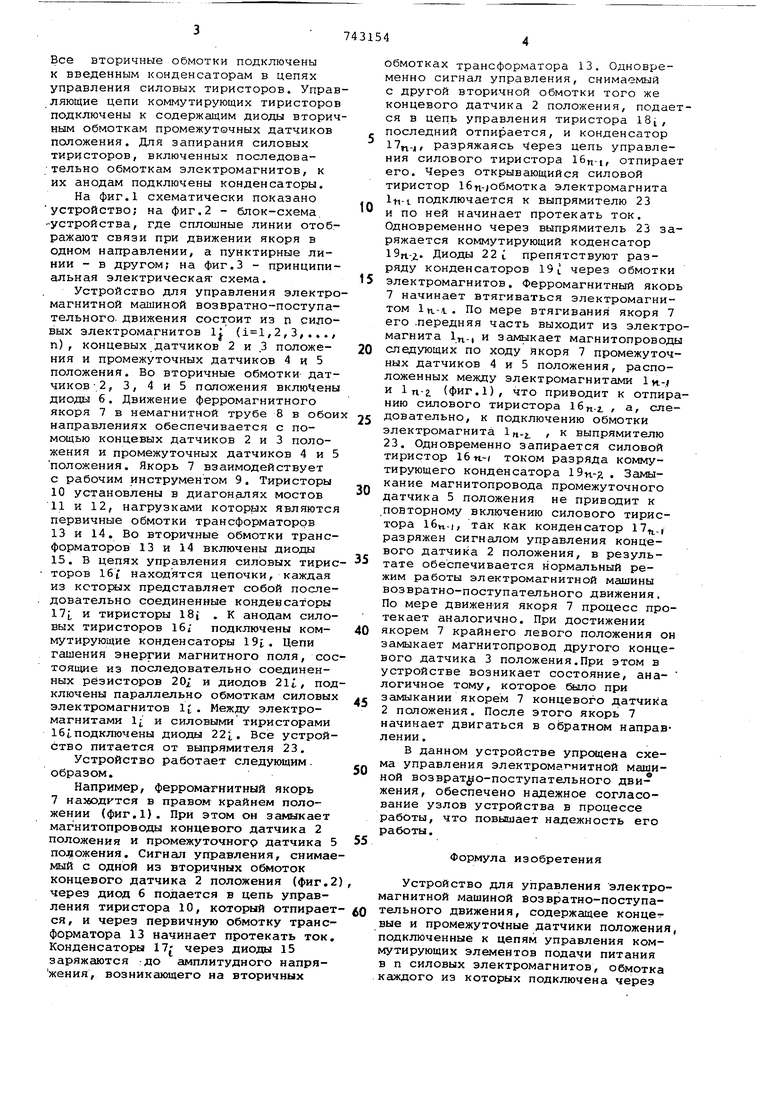
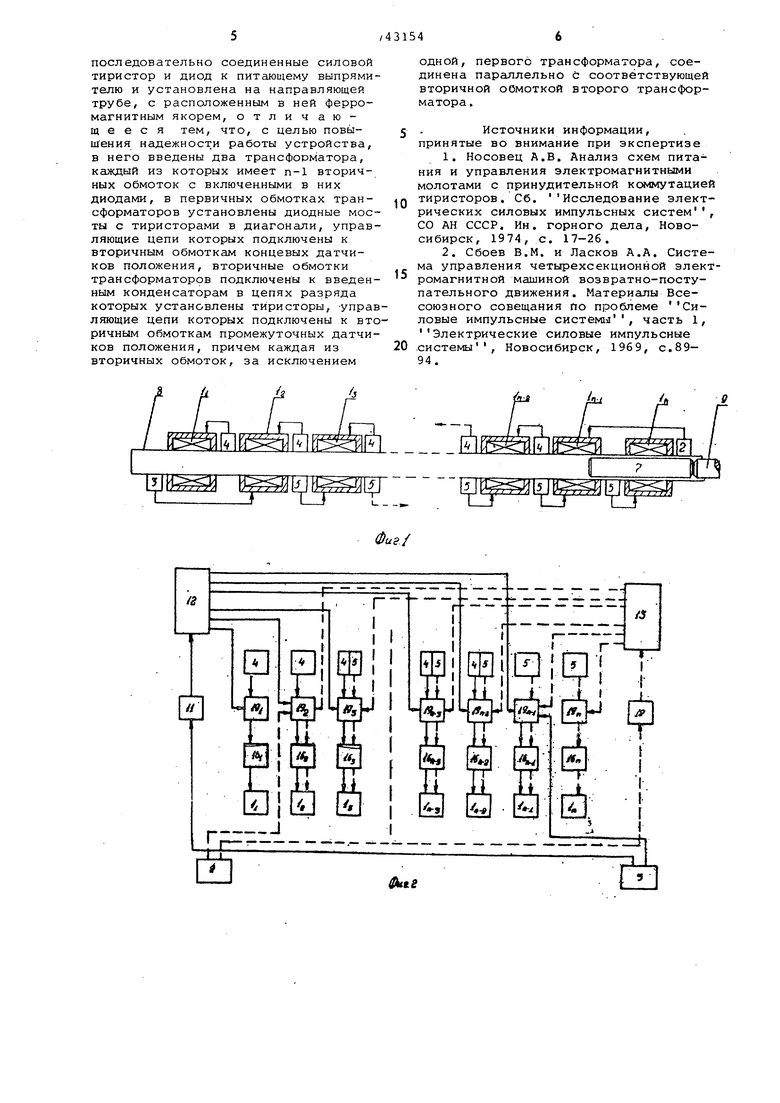
На фиг.1 схематически показано устройство; на фиг,2 - блок-схема, устройства, где сплошные линии отобажают связи при движении якоря в одном направлении, а пунктирные линии - в другом; на фиг.3 - принципиальная электрическая схема.
Устройство для управления электромагнитной машиной возвратно-поступательного, движения состоит из п силоых электромагнитов 1J (,2,3,..., п), концевых датчиков 2 и 3 положения и промежуточных датчиков 4 и 5 положения. Во вторичные обмотки датчиков -2, 3, 4 и 5 положения вклюЧены диоды б. Движение ферромагнитного якоря 7 в немагнитной трубе 8 в обоих направлениях обеспечивается с помощью концевых датчиков 2 и 3 положения и промежуточных датчиков 4 и 5 положения. Якорь 7 взаимодействует с рабочим инструментом 9. Тиристоры
10установлены в диагоналях мостов
11и 12, нагрузками которых являются первичные обмотки трансформаторов
13 и 14. Во вторичные обмотки трансформаторов 13 и 14 включены диоды 15. В цепях управления силовых тиристоров 16; находятся цепочки, каждая из которых представляет собой последовательно соединенные конденсаторы 17;, и тиристоры 18i .К анодам силовых тиристоров 16; подключены коммутирующие конденсаторы I9i, Цепи гашения энергии магнитного поля, состоящие из последовательно соединенных резисторов 201 и диодов 21, подключены параллельно обмоткам силовых электромагнитов 1. Между электромагнитами li и силовыми тиристорами 1 бi,подключены диоды 22;,. Все устройство питается от выпрямителя 23.
Устройство работает следующим. образом.
Например, ферромагнитный якорь 7 назеодится в правом крайнем положении (фиг.1). При этом он замыкает магнитопроводы концевого датчика 2 положения и промежуточногр датчика 5 положения. Сигнал управления, снимаемый с одной из вторичных ойиоток концевого датчика 2 положения (фиг.2) через диод 6 подается в цепь управления тиристора 10, который отпирается, и через первичную обмотку трансформатора 13 начинает протекать ток. Конденсаторы 17 через диоды 15 заряжаются :до амплитудного напряжения, возникающего на вторичных
обмотках трансформатора 13. Одновременно сигнал управления, снимаемый с другой вторичной обмотки того же концевого датчика 2 положения, подается в цепь управления тиристора I8i, последний отпирается, и конденсатор , разряжаясь ерез цепь управления силового тиристора 16n-i, отпирает его. Через открывающийся силовой тиристор 1бп- обмотка электромагнита Ift-i подключается к выпрямителю 23 и по ней начинает протекать ток. Одновременно через выпрямитель 23 заряжается коммутирующий коденсатор 19н.-,2. Диоды 22 t препятствуют разряду конденсаторов 19t через обмотки электромагнитов. Ферромагнитный ЯКОРЬ 7 начинает втягиваться электромагнитом Itt-i. По мере втягивания якоря 7 его .передняя часть выходит из электромагнита , и замыкает магнитопроводы следующих по ходу якоря 7 промежуточных датчиков 4 и 5 положения, расположенных между электромагнитами 1 ц- и 1п-г (фиг.1), что приводит к отпиранию силового тиристора 16п-г. , а, следовательно, к подключению обмотки электромагнита ln-г. г выпрямителю 23. Одновременно запирается силовой тиристор 16 П-/ током разряда коммутирующего конденсатора 19п-д . Замыкание магнитопровода промежуточного датчика 5 положения не приводит к .повторному включению силового тиристора 1бп-), так как конденсатор 17;,, разряжен сигналом управления концевого датчика 2 положения, в результате обеспечивается нормальный режим работы электромагнитной машины возвратно-поступательного движения. По мере движен-ия якоря 7 процесс протекает аналогично. При достижении якорем 7 крайнего левого положения он замыкает магнитопровод другого концевого датчика 3 положения.При этом в устройстве возникает состояние, аналогичное тому, которое алло при замыкании якорем 7 концевого датчика 2 положения. После этого якорь 7 начинает двигаться в обратном направлении.
В данном устройстве упрощена схема управления электромагнитной машиной возвратно-поступательного движения, обеспечено надежное согласование узлов устройства в процессе работы, что повышает надежность его работы.
Формула изобретения
Устройство для управления электромагнитной машиной возвратно-поступательного движения, содержащее конце-т вые и промежуто«1ные датчики положения подключенные к цепям управления коммутирующих элементов подачи питания в п силовых электромагнитов, обмотка каждого из которых подключена через
последовательно соединенные силовой тиристор и диод к питающему выпрямителю и установлена на направляющей трубе, с расположенным в ней ферромагнитным якорем, отличающееся тем, что, с целью повышения надежности работы устройства, в него введены два трансформатора, каждый из которых имеет п-1 вторичных обмоток с включен.ньлми в них диодами, в первичных обмотках трансформаторов установлены диодные мосты с тиристорами в диагонали, управляющие цепи которых подключены к вторичным обмоткам концевых датчиков положения, вторичные обмотки трансформаторов подключены к введенным конденсаторам в цепях разряда которых установлены тиристоры, -управляющие цепи которых подключены к вторичным обмоткам промежуточных датчиков положения, причем каждая из вторичных обмоток, за исключением
одной, первого трансформатора, соединена параллельно и соответствующей вторичной обмоткой второго трансформатора ,
Источники информации, принятые во внимание при экспертизе
1.Носовец А.В. Анализ схем питания и управления электромагнитными молотами с принудительной коммутацией тиристоров. Сб. Исследование электрических силовых импульсных систем , СО АН СССР. Ни. горного дела, Новосибирск, 1974, с. 17-26.
2.Сбоев В.М. и Ласков А.А. Система управления четырехсекционной элект5ромагнитной машиной возвратно-поступательного движения. Материалы Всесоюзного совещания по проблеме Силовые импульсные систем , часть 1, Электрические силовые импульсные
.системы , Новосибирск, 1969, с.89094.
и
Ш 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1980 |
|
SU944049A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1982 |
|
SU1053256A1 |
| Устройство для управления электромагнитным двигателем возвратно-поступательного движения | 1982 |
|
SU1136293A1 |
| ЭЛЕКТРИЧЕСКИЙ МОЛОТ | 1989 |
|
RU2018652C1 |
| Устройство для управления грузоподъемным электромагнитом | 1990 |
|
SU1817144A1 |
| ЭЛЕКТРОПРИВОД УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2017319C1 |
| Устройство для управления двухобмоточным электромагнитным двигателем возвратно-поступательного движения | 1981 |
|
SU1050086A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU880882A1 |
| Генератор импульсов тока | 2015 |
|
RU2631969C2 |
| Электропривод | 1975 |
|
SU597051A1 |