Изобретение относится к текстильно промышленности, а именно к гибким упаковочным элементам для цилиндрических изделий.
Известны гибкие упаковочные элементы для цилиндрических изделий, например шпуль уточной пряжи, имеющие крепежное приспособление, выполненное в виде ручной лебедки, содержащей .храповой тормоз, вал, рукоятку, основание п ось с собачкой.
С целью повьпления надежности в работе один конец нредлагае.ого элемента шарнирпо соединен с ос юванием, а другой свободен, один участок вала в сечении имеет квадратную форму для взаимодействия с собачкой, а два соосных с ним участка - квадратную форму для взаи.модействия с рукояткой, при этом осевая сечения под собачку смещена OTiiOCHтельно (кевой двух соосных сечений на угол О-45°, а в рукоятке, выполненной П-образной, образованы два соосных фигурных отверстия, имеющих форму круга, переходящего в квадрат, и охватывающих два соосных квадратных уча-стка, причем диаметр круглой части фигурного отверстия больще наибольщего размера квадратного сечения вала.
Рукоятка имеет изогнутый участок для навешивания на подъемно-транспортное средство.
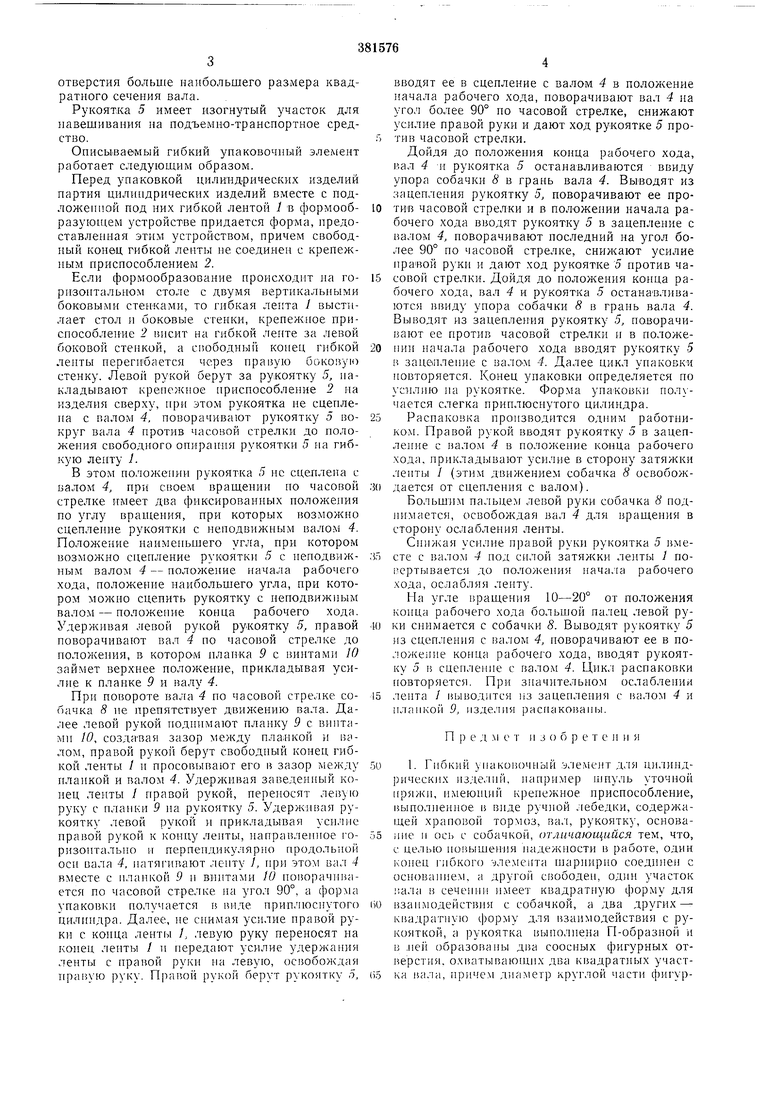
На фиг. 1 показан предлагаемый гибкий упаковочный элемент, вид спереди; на фиг. 2- крепежное приспособленке, вид спереди; на
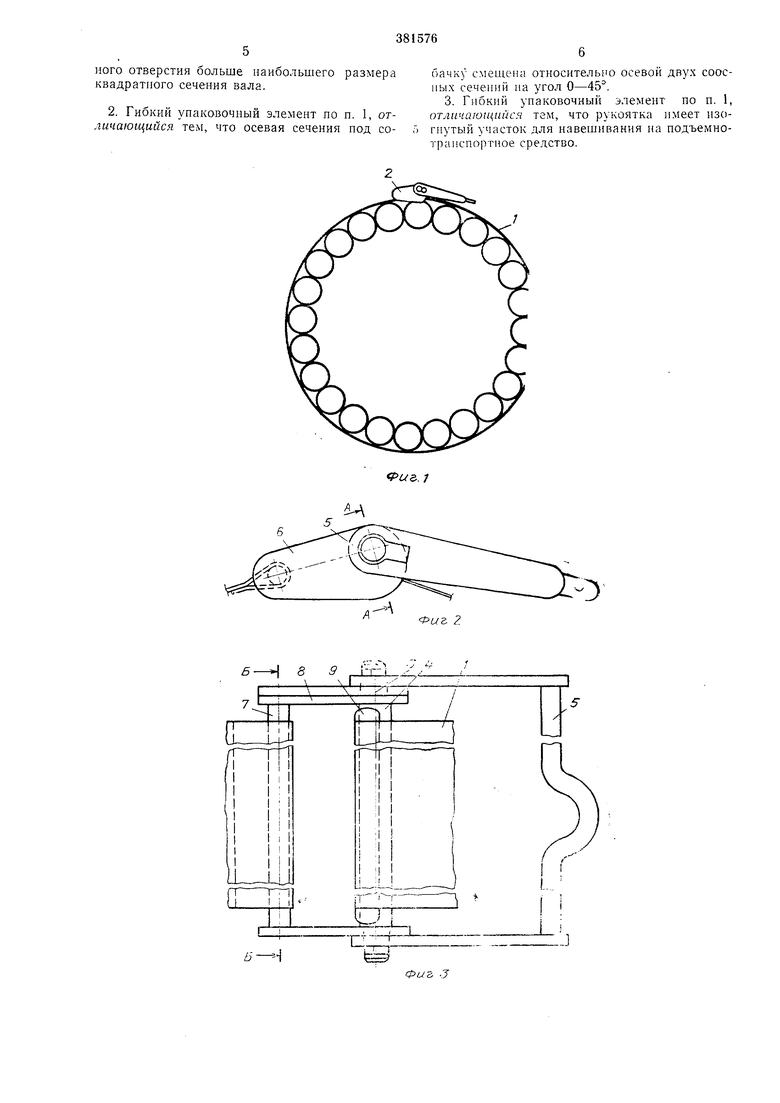
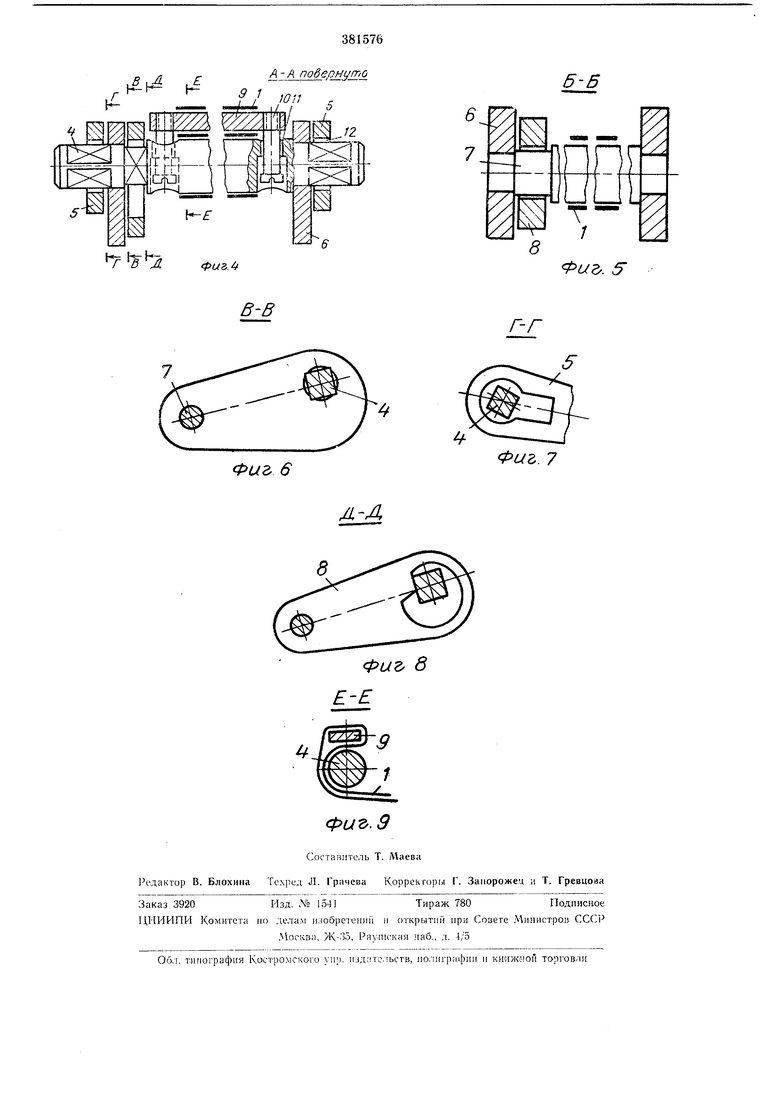
фиг. 3 то же, вид сверху; на фиг. 4 - разрез по /1-.4 на фиг. 2; на фиг. 5 - разрез по Б-Б на фиг. 3; на фиг. 6- разрез по В-В на фиг. 4; на фиг. 7 - разрез по Г-Г на фиг. 4; на фиг. 8 - разрез по Д-Д на фиг. 4; на фиг. 9 - разрез по Е-Е на фиг. 4.
Предлагаемый гибкий упаковочный элемент содержит гибкую ленту /, крепежное приспособление 2, выполненное в виде ручной лебедки, содержащей храповой тормоз 3, вал 4, рукоятку 5, основание 6, ось 7 с собачкой 8 и планку 9 с двумя ипитами 10.
Один конец гибкой ленты / щар)1ирно соединен с основанием 6, а другой свободен. Планка 9 возможность перемещения в направлении, перпендикулярном продольной оси вала 4, один участок которого в сечении имеет квадратную форму для взаимодействия с собачкой 8, а два соосных с ним участка в сечении - квадратную форму для взаимодействия с рукояткой 5, при этом осевая сечения од собачку смещена относительно осевой двух соосных сечений на угол О-45°. В вале образованы два ступенчатых отверстия 11, перпендикулярных к его продольной оси, а в рукоятке, выполненной П-образной, образованы два соосных фигурных отверстия 12, имеюН1ИХ форму круги, переходящего в квадрат, и охватывающих два соосных квадратных участка, причем диаметр круглой части фигурного
отверстия оольше наноольи1его размера квадратного сечения вала.
Рукоятка 5 имеет изогнутый участок для навешивания на подъемно-транснортное средство.
Описываемый гибкий упаковочный элемент работает следующим образом.
Перед упаковкой цилиндрических изделий партия цилиндрических изделий вместе с подложенной под них гибкой лентой 1 с формообразующем устройстве придается форма, нредоставленная этим устройством, причем свободный конец гибкой ленты не соединен с крепежным приспособлением 2.
Если формообразование происходит на горизонтальном столе с двумя вертикальными боковыми стенками, то гибкая лента / выстилает стол и боковые стенки, крепежное приспособление 2 внсит на гибкой ленте за левой боковой стенкой, а свободный конец гибкой ленты перегибается через правую боковую стенку. Левой рукой берут за рукоятку 5, накладывают кренежное триспособление 2 на изделия сверху, при этом рукоятка не сцеплена с валом 4, поворачивают рукоятку 5 вокруг вала 4 против часовой стрелки до положения свободного опираиия рукоятки 5 на гибкую ленту 1.
В этом положепии рукоятка 5 не сцеплена с валом 4, при своем вращении по часовой стрелке имеет два фиксированных положепия по углу вращеиия, при которых возможно сцепление рукоятки с ненодвижным валом 4. Положение наимеиьшего угла, при котором возможно сцепление рукоятки 5 с неподвижным валом 4 - положение начала рабочего хода, положение иаибольщего угла, при котором можио сцепить рукоятку с иеподвижным валом - положение конца рабочего хода. Удерживая левой рукой рукоятку 5, правой поворачивают вал 4 по часовой стрелке до положения, в котором планка 9 с винтами 10 займет верхнее положение, нрикладывая усилие к плапке 9 и валу 4.
При повороте вала 4 по часовой стрелке собачка 8 не препятствует движению вала. Далее левой рукой иодннмают планку 9 с винтами W, создавая зазор между и валом, правой рукой берут свободпый конец гибкой леиты / и просовывают его в зазор между планкой и валом 4. Удерживая заведенный конец леиты 1 правой рукой, переносят левую руку с планки 9 на рукоятку 5. Удерживая рукоятку левой рукой и прикладывая усилие правой рукой к концу леиты, направлещше горизонтально и перпепдикулярно продольной оси вала 4, натягавают ленту /, при этом вал 4 вместе с нланкой 9 н винтами 10 поворачивается по часовой стрелке на угол 90°, а форма упаковки нолучается п ириплюснутого цилиндра. Далее, не снимая усилие нравой рукн с конца ленты /, левую руку переносят на конец ленты / н передают усилие удержания ленты с правой рукн на левую, освобождая правую руку. П|1авой рукой берут рукоятку 5,
вводят ее в сцепление с валом 4 в положение начала рабочего хода, поворачивают вал 4 на угол более 90° по часовой стрелке, снижают усилие правой руки и дают ход рукоятке 5 против часовой стрелки.
Дойдя до положения коица рабочего хода, вал 4 и рукоятка 5 остаиавливаются ввиду уиора собачки 8 в грань вала 4. Выводят из зацепления рукоятку 5, поворачивают ее против часовой стрелки и в положеиии начала рабочего хода вводят рукоятку 5 в зацепление с валом 4, иоворачивают последний на угол более 90° но часовой стрелке, снижают усилие правой руки и дают ход рукоятке 5 против часовой стрелки. Дойдя до положения коица рабочего хода, вал 4 и рукоятка 5 останавливаются ввиду упора собачки 8 в грапь вала 4. Выводят из зацепления рукоятку 5, поворачивают ее против часовой стрелки п в положении начала рабочего хода вводят рукоятку 5 и зацбнление с валоМ 4. Далее цикл упаковки повторяется. Конец унаковки определяется по усилию па рукоятке. Форма уиа-ковки получается слегка приплюсиутого цилиндра.
Распаковка производится одним работником. Правой рукой вводят рукоятку 5 в зацепление с валом 4 в положеиие конца рабочего хода, ирикладывают усилие в сторону затяжки ленты / (этим движением собачка 8 освобождается от сцепления с валом).
Большн.м на:1ь хем левой руки собачка 8 подшгмается, освобождая вал 4 для вращеиия в сторону ослаблення ленты.
Снижая усилие правой руки рукоятка 5 вместе с валом 4 под силой затяжки ленты 1 повертывается до положения нача.та рабочего хода, ослабляя ленту.
На угле вращення 10-20° от положения конца рабочего хода большой па.1ец левой руки снимается с собачки 8. Выводят рукоятку 5 из сцеплення с валом 4, поворачивают ее в положение конца рабочего хода, вводят рукоятку 5 в сценление с валом 4. Цикл распаковки повторяется. При значительном ослаблении лента / выводится ii3 зацепления с валом 4 и плашчой 9, нзде.чия распакованы.
П р е д м е т и з о б р е т е н н я
1. Гибкий упако1и)чиый элемент для цилиндрических изделнй, наиример гпнуль уточной кряжи, нмеюни1Й креиежиое ириспособление, выполненное в виде лебедки, содержащей храповой тормоз, вал, рукоятку, основание II ось с собачкой, отличающийся тем, что, с целью повышения надежности в работе, один конец |-11бкого элемента шарнирно соединен с основанием, а другой свободен, один участок нала в сеченнн нмеет квадратную форму для взанмодейст1Я1я с собачкой, а два других - квадратную форму для взаимодействия с рукояткой, а рукоятка выполнена П-образиой ii в .ней образованы два соосных фигурных отверстия, охватывающих два квадратных участка вала, причем диаметр круглой части фигурного отверстия больше наибольшего размера квадратного сечения вала.
2. Гибкий упаковочный элемент по п. 1, отличающийся тем, что осевая сечения под собачку смещена относительно осевой двух соосных сечений на угол О-45°.
3. Гнбкий упаковочный элемент по п. 1, отличающийся тем, что рукоятка нмеет изогнутый участок для навешивания на подъемнотранснортиое средство.
fcSi
,.i
. 2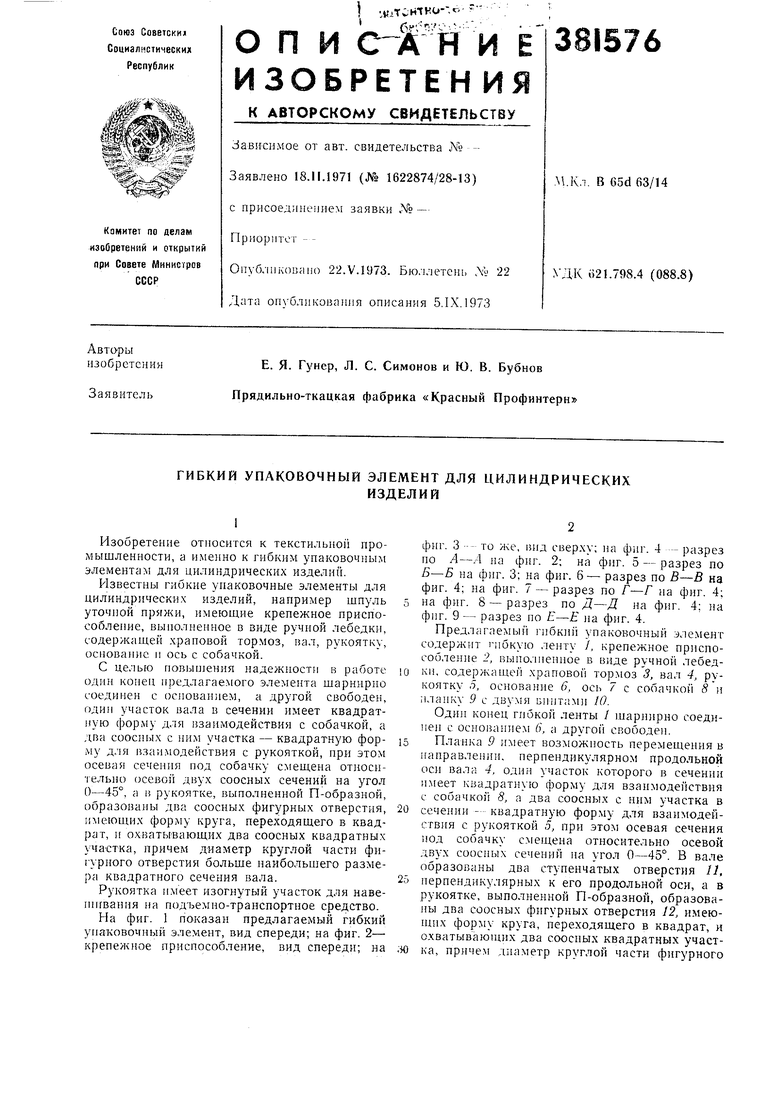
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВЫЙ ПРИВОДНОЙ МЕХАНИЗМ ЗАПУСКА С ПОВОРОТНОЙ РУЧНОЙ ОТВОДЯЩЕЙ СИСТЕМОЙ С ВОЗВРАТНОЙ ПРУЖИНОЙ | 2006 |
|
RU2420240C2 |
| МНОГОХОДОВОЙ МЕХАНИЗМ С АВТОМАТИЧЕСКИМ ОТВЕДЕНИЕМ В КОНЦЕ ХОДА | 2006 |
|
RU2419392C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С БЛОКИРУЕМОЙ СИСТЕМОЙ ВЫСТРЕЛИВАНИЯ | 2009 |
|
RU2492820C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ОТВОДНЫМ ВЫСТРЕЛИВАНИЕМ | 2009 |
|
RU2493789C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕГО ОБРАБОТКИ (ВАРИАНТЫ) | 2009 |
|
RU2488358C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
tj
Фиг .J
