1
Изобретение относится к электромоделирозанию, а именно к электрохимической размерной обработке металлов и снлавов и предназначено для моделирования на электропроводной бумаге различных градиентных задач.
Известны электроинтеграторы градиентных задач, при помощи которых исследуют процесс формообразования поверхности при электрохимической размерной обработке. Известно также аналогичное моделируюпдее ycrpoiiство, приставка к которому позволяет наблюдать на экране осциллоскопа не только распределение нотеициалов, но и распределение градиента его вдоль заданной линии тока, что используется при решении задач гидродинамики.
Однако при работе с известным электроинтегратором градиентных задач условие того, что направление градиента потенциала нерпендикулярно границе, приводит при сложней геометрии граничных условий, наносимых сплавом Вуда, к следующему.
1.Приходится разбивать исследуемую область на большое количество «шагов, так как линия тока перпендикулярна границе чаще всего на малом участке, что увеличивает время решения задачи.
2.Ручное ведение блока выдачи градиента не обеснечивает необходимой точности решения задачи.
3. Отсутствие прямой обратной связи с устройства, отрабатывающего величину градиента потенциала, приводит к погрешности из-за инерционности привода.
4. При работе моделирующего устройства с приставкой необходимо осуществить предварительное нанесение на модель эквипотенциалей линий тока и затем выполнить ручную установку электродов на линию тока через
равные промежутки, что увеличивает время решения задачи.
5. Схема достаточно сложна, что ведет к накапливанию погрешностей; она не применима при рассмотрении распределения градиентов потенциала вдоль границы моделируемой области.
Целью изобретения является создание моделирующего устройства для решения градиентных задач на электропроводной бумаге,
которое позволяет получить линии поля (эквипотенциали и линии тока) и автоматически снимать величииу градиента потенциала в приграничных слоях с графической выдачей результата при моделировании различных градиентных задач, в частности при исследовании процесса электрохимической размерной обработки металлов и сплавов.
Согласно изобретению, в предлагаемом моделирующем устройстве эта цель достигается
использованием в нем трех следящих систем,
две из которых раоотают по принципу уравновешивания мостовых схем, а третья - на сигнале рассогласования, возникающем между соседними эквипотенциалями донолнительной модели.
Первая следящая система задает величину градиейта потенциала за счет сигиала между границей моделируемой оОласти и эквипотенциалыо, который на функциональном Олоке дает линейную величину зазора, нреобразовывающуюся в обратную функцию, т. е. градиент иотенциала задается иеременным зазором и постоянной разностью нотенциалов. Функциональное устройство анпроксимирует ооратную функцию.
ьторая следящая система отрабатывает величину градиента иотенциала, сравнивая сигнал с функционального блока в виде функции, обратной зазору, с сигналом линейного потенциометра отработки. Съем величины градиента потенциала в предлагаемом моделирующем устройстве производится по линии тока, для вывода на которую имеется третья следящая система, раоотающая на сигнале рассогласования между двумя близлежащими эквипотенциалями дополнительной модели, которые являются линиями тока первой модели. Механизм вывода на линию тока, задания и отработки величины градиента нотеициала имеет вращательное движение с возвратно-поступательным прямолинейным движением щупов по направляющим, а для ведения неподвижных щупов по границе - возвратио-ноступательное взаимно перпендикулярдое движение столов. Для фиксации результатов моделирования под дополнительную модель подложена копировальная бумага, и результат, таким образом, автоматически выдается в виде графика на обычной бумаге.
Изобретение поясняется чертежами.
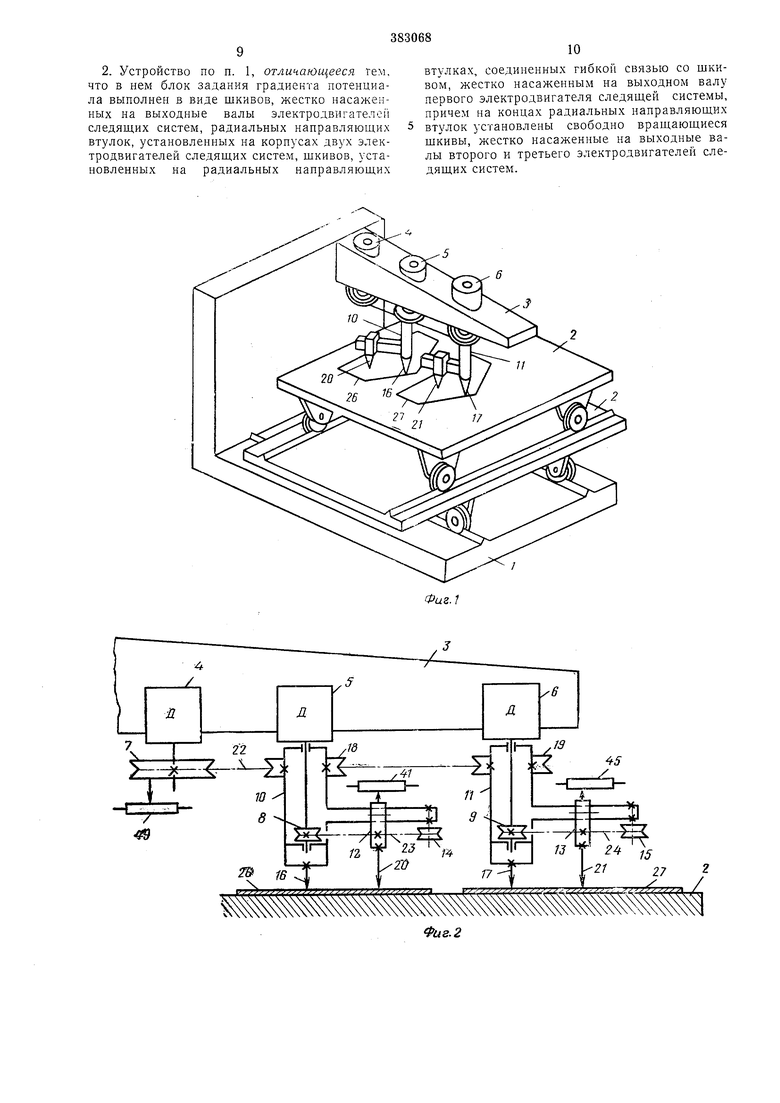
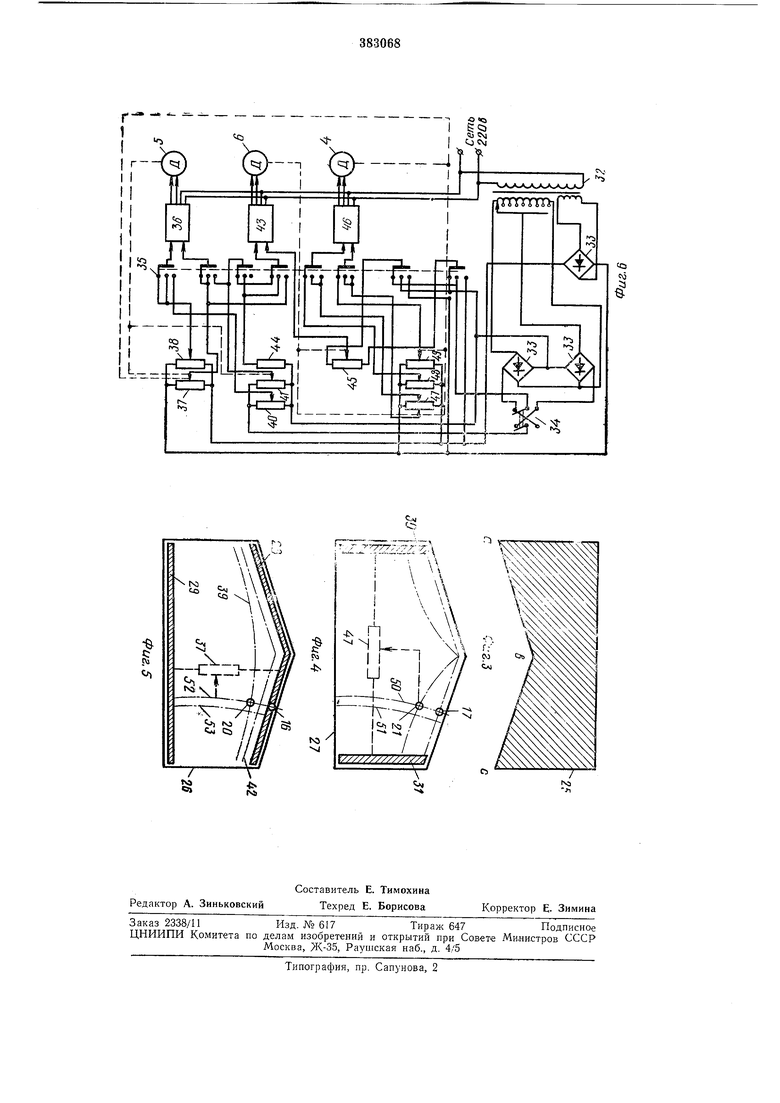
На фиг. 1 приведен внещний вид (в изометрической проекции) моделирующего устройства для рещения градиентных задач; на фиг. 2 - кинематическая схема механизма вывода на линию тока задания и отработки градиента потенциала; на фиг. 3 - контур детали после электрохимической размерной обработки; на фиг. 4 - дополиительная модель для решения градиентных задач; на фиг. 5 - основная модель для решения градиентных задач; на фиг. 6 - функциональная электрическая схема моделирующего устройства для решения градиентных задач.
Моделирующее устройство для рещения градиентных задач (см. фиг. 1) состоит из основания /, на котором расположены электронный блок (не показан), нижний и верхний столы 2, имеющие возможность взаимно перпендикулярного перемещения, и жестко закрепленная на основании 1 «ад верхним столом 2 траверса 3, на которой, в свою очередь, смонтирован механизм задания и отработки величины градиента потенциала и вывода подвижных щупов на основной и дополнительных моделях на ианравление вектора градиента нотенциала.
Этот механизм включает в себя (см. фиг. 1 и 2) приводы электродвигателей 4, 5, 6, на выходных валах которых жестко насажены, соответственно, щкивы 7, S и 5. Втулки 10 и // установлены на корпусах электродвигателей 5 и 6 с возможностью свободного поворота.
Втулки 10 и // имеют радиальные направляющие, по которым могут перемещаться расположенные на них ползуны 12 и 13. Кроме того, на концах радиальных направляющих втулок 10 и // смонтированы свободно вращающиеся шкивы 14 и 15, а также на оси вращения вышеуказанных втулок жестко закреплены щупы J6 и 17 и шкивы ,18 и 19 соответственно. На ползунах 12 и J3 установлены щупы
20 и 21 которые могут перемещаться вместе с ними. Шкивы 7, 18 и 19, имеют одинаковый диаметр и соединены щнуром 22 для возможности синхронного поворота втулок 10 к 11 с радиальными направляющими под действием
электродвигателя 4. Шкивы 8 и 14 так же, как и шкивы 9 и 15, соединены соответственно шнурами 23 и 24, которые, в свою очередь, закреплены на ползунах 12 и 13 для передачи им поступательного движения от врап;ающи.ся под действием электродвигателей 5 и 6 шкивов 8 И1 9. Исходя из конгтура а - b-с детали 25 (см. фиг. 3), берутся основная модель 26 (см. фиг. 5) и дополнительная- 27 (см. фиг. 4, на которых сплавом Вуда наносят
выступы 28, 29, 30 и 31, задающие граничные условия, соответствующие моделируемой области. Вышеуказанные модели 26 и 27 закреплены зажимами (не показаны) на поверхности верхнего стола (см. фиг. 1) таким образом, чтобы при перемещении нижнего и верхнего столов 2 щупы 16 и 17 (см. фиг. 2) проходили одноименные точки основной и дополнительной моделей. Функциональная электрическая схема модулирующего устройства (см. фиг. 6) содержит масштабный трансформатор 32, на выходах которого подключены напряжения, переключатель 35 рода работ и три следящих системы.
Первая следящая система, предназначенная для задания величины градиента потенциала, состоит из усилителя 36 с каскадом сравнения на входе, электродвигателя 5 и измерительной части, в которую входят переменные
резисторы 37 и 38.
Переменный резистор 37, обозначенный на фиг. 5 пунктиром, имеет сопротивление электропроводной бумаги основной модели 26, а нодвижным контактом его является перемещающийся по модели 26 (см. фиг. 2) подвижный щуп 20.
Переменный резистор 38 (см. фиг. 6) является задающим для эквипотенциали, например 39 (см. фиг. 5), основной модели 26. В
зависимости от положения переключателя рода работ 35 (см. фиг. 6) измерительная часть вышеупомянутой следящей системы включает в себя переменные резисторы 40 и 41, ири-;с.резистор 40 является задающим потенц}1о:метром эквидистанты, например 42 (см. фиг. о), на основиой модели 26, в резистор 41 (см. фиг. 5) представляет собой потенциометр (ло показан), жестко закрепленный на радиальной направляющей втулки 10 (см. фиг. 2), подвижный контакт которого жестко связан с ползуном 12.
Вторая следящая система отработки величины градиента потенциала состоит из усилителя 43 (см. фиг. 6), электродвигателя 6 и измерительной части, которая включает в себя переменный резистор 41, между нодвиж1:ь М контактом и одним из концов которо.о может подключаться резистор 44 и переменный резистор 45, являющийся потеникометром, жестко закрепленным (не показан) на радилльмой направляющей втулки 11 (см. фиг. 2) по.пижный контакт которого, в свою очередь, жестко связан с ползуном 13. В зависимости (-т положения переключателя рода работ .jJ (см. фиг. 6) измерительная часть данил следящей системы может представлять собой мост, состоящий из переменных резисторов 45 и 37.
Третья следящая система - система вывода подвижных щупов на направление вектора градиента потенциала - состоит из усилителя 46 (см. фиг. 6), электродвигателя 4 и измерительной части, в которую в зависимости от положения переключателя рода работ i-5 входят либо резистор 47, либо резистооы 48 и 49.
Переменный резистор 47 (см. фиг. 4) ягляется резистором (изображен пунктиром) дополнительной модели 27, а подвижные контакты его - это щупы 17 и 21, находящиеся на соседних эквипотенциалах 50 и 51 указанной модели. Данные эквипотенциала соответствуют линиям тока 52 и 53 на основной модели 26 (см. фиг. 5), так как геометрическая форма токонроводящих выступов 30 и 31, задающих граничные условия дополните.ьиои модели 27, является такой же, что и у неироводящих (линии среза) граничных условий основной модели 26, и наоборот.
Переменный резистор 48 служит для ручного задания величины синхронного поворота втулок 10 н 11 с радиальными направляющими (см. фиг. 2), т. е. и щупов 20 и 21, а переменный резистор 49 - для отработки величины заданного синхронного поворота; он является кольцевым и расположен над шкивом 7, причем подвижный контакт его жестко закреплен на данном щкиве.
Предлагаемое устройство в зависимости от положения переключателя рода работ 35 (см. фиг. 6) может работать в одном из трех возможных режимов. При работе устройства в любом режиме необходимо перемещать верхний и нижний столы 2 (см. фиг. 1) с обязательным условием, чтобы неподвижный щуп
16 находился постоянно на указанной анодной границе 28 (см. фиг. 5) основной модели 26, а неподвижный щуп 17 (см. фиг. 4) находился на соответствующей границе дополлительной модели 27.
В первом режиме (переключатель рода работ 35 находится в положении, показанном на фиг. 4) ycTpoiiCTBO позволяет находить картину электрического поля в моделируемой области. Для этого сначала фиксируется положение втулок 10 и 11 с радиальными направляющими (см. фиг. 2) нерпендикулярпо границе 29 (см. фиг. 5) основной модели 26 при помощи третьей следящей системы, которая
в этом режиме работает следующим образом. На входной каскад сравнения )силнтеля 46 (см. фиг. 6) поступает сигнал, задаваемы с потенциометра ручного поворота 48. Он сравнивается с сигналом с кольцевого переменного резистора 49 отработки поворота. Усиленный разностный сигнал поступает на двигатель 4, который производит поворот ерез передачу щнуром 22 (см. фиг. 2) между щкивами 7, 18 и 19 втулок 10 и // с радиальными
направляющим до тех нор, пока сигнал, снимаемый с подвижного жестко закрепленного на щкнве 7 контакта переменного резистора 49 не сравняется с сигналом, заданным на переменном резисторе 48 ручного доворота.
Затем на усилитель 36 первой следящей системы подается сигнал с задаюн1,его переменного резистора 38 эквипотенциали (см. фиг. 6), который сравнивается с сигналом, снимаемым через щуп 20 (см. фиг. 2) с основпой модели 26 (па фиг. 6 это переменный резистор 57). Ьсилеипый разностнын сигнал поступает на электродвигатель 5 (см. фиг. 6 и 2), который через передачу 23 между HIK;;зами 8 и 14 выводит иодвижньп щуп 20, закрепленный на ползуне 12, на эквипотенциаль, заданную на потенциометре 55 (см. фиг. 6).
В это же время па усилитель 43 BTOpoii следяще11 системы поступают сигналы с перемеипого резистора 45 и с переменного резистора
41, который пропорциопалеи расстоянию между границей 28 (см. фиг. 5) на основной модели 26 и заданной эквипотенциалью 39, так как подвилчный контакт его жестко связан с ползуном 12 (см. фиг. 2). Усиленный разностный сигнал при помощи электродвигателя 4 (см. фиг. 6) приводит в движение через передачу 24 между Н1кивами 9 и 15 ползун 13, несущий подвижный контакт переменного резистора 45, до тех нор, пока данный подвижный контакт, а также подвижный щуп 21 не отложит на перемещюм резисторе 45, а также на донолнительпой модели 27, то же расстояние, которое имеется на переменном резисторе 41, а также на основиой модели. Таким образом на дополнительной модели 27 откладывается лнпия тока основной модели 26.
Во втором режиме (переключатель рода работ 55 находится в среднем положении) устройство позволяет ::сдавать величину гра.диента потенциала через расстояние между
анодной границей моделируемой области, например угловой поверхностью 28 (см. фиг. о) и эквипотенциалью 39, измеряемое по линии тока 52. Первая следящая система находит эквипотенниаль 39 (см. фиг. 5) точно так же, как и в первом режиме, так как измерительная часть ее состоит из того же моста, составленного из переменных резисторов 37 и 38 (см. фиг. 6). В то же время на усилитель 46 третьей следящей системы поступает сигнал, снимаемый неподвижным щупом /7 (см. фиг. 4) с эквинотенциали 50 дополнительной модели 27 (см. фиг. 4; на ней это - неременный резистор 47), и сигнал, снимаемый подвижным щупом 21 с одной из соседних эквипотенциалей, например 51 (на фиг. 4 это тоже переменный резистор 47). Усиленный разностный сигнал ноступает на электродвигатель 4, который через передачу 22 (см. фиг. 2) между щкивами 7, 18 и 19 производит поворот втулок 10 и 11 с радиальными направляющими до тех пор, пока подвижный щуп 21, закрепленный на ползуне 13, не окажется на той же эквипотенциали донолнительной модели, что и щуп 17, т. е. на эквипотенциали 50 (см. фиг. 4), а подвижный щуп 20, закрепленный на ползуне 12 (см. фиг. 2) не окажется на той же линии тока 52 (см. фиг. 5) основной модели 26, что и щуп 16 (см. фиг. 2).
Имея направления вектора градиента потенциала от точки 20 к точке 16 (см. фиг. 5) на основной модели 26 и от точки 21 к точке 17 (см. фиг. 4) на дополнительной модели 27, измеряют расстояние от точки 16 (см. фиг. 5) анодной границы 28 до точки 20 выбранной эквипотенциали 39 при помощи переменного резистора 41 (см. фиг. 2 и 6). Электрический сигнал, снимаемый с подвижного контакта переменного резистора 41, являющийся величиной, обратно пропорциональной измеряемому расстоянию, благодаря включению резистора 44, задает величину градиента потенциала и поступает на усилитель 43 второй следящей системы. В то же время на усилитель 43 приходит сигнал с переменного резистора 45 отработки величины градиента потенциала. Усиленный разностный сигнал поступает на электродвигатель 6, который через передачу 24 (см. фиг. 2) между щкивами 9 и 15 перемещает ползун 13 со щупом 21 до тех пор, пока сигнал, снимаемый с подвижного контакта жестко закрепленного на ползуне 13 переменного резистора 45, не сравняется на входе усилителя 43 (см. фиг. 6) с сигналом, поступающим от переменного резистора 41. В этом случае подвижный щуп 21 на дополнительной модели 27 (см. фиг. 4) отложит величину градиента потенциала от точки 21 до точки 17.
В третьем режиме (переключатель рода работ 35) (см. фиг. 6) находится в нижнем положении) устройство позволяет задавать величину градиента потенциала через напряжение, снимаемое между соответствующими точками анодной границы 28 (см. фиг. 5) и
эквидистапты 42, лежащими на одной и той же линии тока, нанри.мер 52.
В этом случае на усилитель 56 (см. фиг. 6) первой следящей системы поступают сигналы, снимаемые с задающего неременного резистора 40 эквидистанты, и неременного резистора 41.
Усиленный разностный сигнал поступает на электродвигатель 5, который через передачу
23 (см. фиг. 2) между шкивами 8 и 14 вь водит подвижный щуп 20, закрепленный так же, как и подвижный контакт переменного резистора 41 на ползуне 12, на экзидистанту 42 (см. фиг. 5), т. е. при обходе Гранины 28 зазор между щупами 16 и 20 (см. фиг. 2) ноддерживается постоянным и величина его задается установкой перемепного резистора 40 (см. фиг. 6). Выход подвижных щупов 20 и 21 (см. фиг.
4 и 5) на линию тока основной 26 и донолнительной 27 моделей производится третьей следящей системой точно так же, как и во втором режиме, так как измерительная часть ее остается без изменения. На усилитель 43 (см.
фиг. 6) второй следящей системы поступает сигнал, снимаемый подвижным щупом 20 (е.м. фиг. 2) с соответствующей точки эквидистанты 42 (см. фиг. 5) в основной модели 26 (на фиг. 6 переменный резиетор 37), и сигнал,
снимаемый с переменного резистора 45 отработки величины градиента потенциала. Усиленный разностный сигнал управляет электродвигателем 6, который через передачу 24 (см. фиг. 2) между шкивами 9 и 15 перемещает
ползуп 13 со щупом 21 до тех пор, пока еигнал, снимаемый с подвижного контакта, жестко закрепленного на нолзуне 13 переменного резистора 45, не сравняется иа входе усилителя 43 (см. фиг. 6) с сигналом, снимаемым
с соответствующей точки эквидистапты 42 (см. фиг. 5) основной модели 26.
Результат во всех режимах фиксируется через конировальную бумагу, ноложенную под дополнительную модель 27.
Предмет изобретения
1. Электроинтегратор для решения градиентных задач, содержащий трансформатор, переключатель, модель из электропроводящего материала с установленными на ней подвижными щупами и измерительные схемы, отличающийся тем, что, с целью расщирения класса решаемых задач, оно содержит дополнительную модель из электропроводящего материала, траверсу, три следящие системы, соединенные через переключатель е соответствующей измерительной схемой, каждая из которых выполнена в виде электродвигателя, укрепленного па траверсе, ко входу которого
подключен усилитель, соединенный с первичной обмоткой трансформатора, и блок задания градиента, соединенный с электродвигателями следящих систем потенциала, и основной и дополнительной моделями из электропроводящего материала.
2. Устройство по п. 1, отличающееся гем, что в нем блок задания градиента потенциала выполнен в виде шкивов, жестко насаженных на выходные валы электродвигателе следящих систем, радиальных направляющих втулок, установленных на корпусах двух электродвигателей следящих систем, шкивов, установленных на радиальных направляющих
втулках, соединенных гибкой связью со шкивом, жестко насаженным на выходном валу первого электродвигателя следящей системы, причем на концах радиальных направляющих втулок установлены свободно вращающиеся шкивы, жестко насаженные на выходные валы второго и третьего электродвигателей следяших систем.