Изобретение относится к автоматизации судовых энергетических установок, в частности к системам и устрой ствам управления мощностью и оборота ми двигателя, и может быть использовано в системах дистанционного автом тизированного управления (ДАУ) главными судовыми двигателями. Обеспечение плавного разогрева (охлаждения) двигателя необходимо для уменьшения до допустимой величины термоперегрузок, которые в динами ческом режиме набора (сброса) нагру ки могут значительно превышать термические нагрузки, наблюдаемые в ста цирнарном режиме работы двигателя. хИзвестно устройство программного управления разогревом и охлаждением судового двигателя, содержащее задатчик оборотов двигателя, программное устройство, связанное через следяр1ую систему с регулятором оборотов р Недостатком известного устройства является то, что программа разогрева (охлаждения) выбирается из условия обеспечения разогрева холодного (или охлаждения горячего) двигателя и для частично разогретого двигателя является избыточно замедленной, что ухудшает маневренные качества судна Цель изобретения - расширение функциональных возможностей. Поставленная цель достигается тем, что устройство программного управления разогревом и охлаждением судового двигателя, содержащее задат чик оборотов двигателя, программное устройство, связанное через следящую систему с регулятором оборотов, дополнительно снабжено датчиком температуры двигателя, а программное устройство выполнено в виде двух блоков вычисления соответственно верхней и нижней границ допустимого диапазона изменения температуры двигателя, блока сравнения, блока логики и коммутатора, причем три входа .блока сравнения подключены к коммутатору, а также соответственно к задатчику оборотов и через два блока вычисления - к датчику температуры двигателя, а выход блока сравнения через блок логики связан с входом коммутатора, выход которого подключен к следящей системе. На Лиг.1 изображена функциональна схема устройства; на фиг.2 - схема блока вычисления5 на,фиг.3 - схема блока ЛОГИКИ; на фиг.4 - схема коммутатора-, на фиг.5 - схема следящей системы. В состав устройства входят задатчик 1 оборотов, датчик 2 температуры поверхности двигателя, два блока 3 и 4 вычисления, оттределяющих значения минимальных n,f и максимальных оборотов, блок 5 сравнения, формирующий сигнал для блока 6 логики, который вырабатывает выходные сигналы, представленные в табл. 1. Коммутатор 7вырабатывает сигналы для следящей системы 8, представленные в табл.2. Следящая система 8 связана с регулятором 9 оборотов. Блоки 3 и 4 вычисления по текущей температуре t внутренней стенки втулки двигателя определяют границы допустимого диапазона скачкообразного изменения оборотов ( .й ммн ) Блоки вычисления идентичны, каждый блок (фиг.2) содержит девять резисторов 10-18, два диода 19 и 20, два операционных усилителя 21 и 22. Блок 6 логики содержит три элемента 23-25 типа 2И, причем первый вход элемента 23 и второй вход элемента 24 - инверсные. Такая схема формирует комбинацию выходных сигналов У1, У2, УЗ в зависимости от входных сигналов XI, Х2 согласно табл. 1. В качестве коммутатора 7 используется многоканальный переключатель аналоговых сигналов. Следящая система 8содержит (фиг.5) сумматор 26, усилитель 27, электродвигатель 28, редуктор 29, датчик 30 обратной связи. Элементы, устройства соединены следующим образом. Вход регулятора 9 оборотов через следящую систему 8 . соединен с выходом коммутатора 7, первый, второй и третий входы которого соединены с выходами блока 6 логики, а четвертый, пятый и шестой входы коммутатора 7 соединены с выходами первого 3 и второго 4 блоков вычисления и выходом задатчика 1 оборотов и одновременно с входами блока 5 сравнения, выходы блока 5 сравнения соединены с-входами блока 6 логики, а вход датчика 2 температуры соединен с входами первого 3 и второго 4 блоков вычисления. Рассмотрим теоретические основы работы устройства. Термонапряжения в дета31ях двигателя определяются градиентом темпе3tt,t-) который при разогр parypgradt ве может значительно превышать заданное допустимое значение (grafjt j,p) Известно также, что наибольшие значения градиента температур при разогреве возникают на стороне нагревания детали (). Рассмотрим выражение для граничных условий на стороне нагревания. ЭКх.У) -градиент т Ix-o дх ператур на стороне нагревания, tiO,) температура детали на стороне нагре ва;: tr(t) - температура среды (средняя результирующая температура горячих газов); f-( коэффициенты теплоотдачи (осредненный за цикл, максимальный) и теплопроводно ти .Заменив величину grad t на максимально допустимое значение гра диента А,- обозначив г / Л В и учи тывая, что при нагревании градиент / 14считается отрицательным ( t(i,or, а при охлажд.ении - положительным (гайЪдав ), можно записать /.. или для нагревания ) + A Vif-U и для охлаждения 8t(t,)-A В Таким образом, задаваясь абсолютной величиной максимально допустимого значения градиента Аи зная температуру t (0,t) нагреваемой поверхности детали, можно определить диапазон температур (tr(f)-t(«f)), в котором любое изменение величины tp() не приводит-к Недопустимым термонапряжениям. Очевидно, что изме ;нением (0,) изменяются и значения и выбор максимально допустимого воздействия производится в функции от реального теплового состояния двигателя. Учитывая, что мощность двигателя пропорци нальна средней температуре газов, 116.00844 можно получить допустимый диапазон изменения мощностей Ломаке К()ми„ .В установках с винтом фиксированного шага зависимость оборотов вала от мощности двигателя неоднозначна и зависит от загрузки судна, ветроволновых воздействий и т.д. Однако разброс этих зависимостей невелик и, как правило, руководствуются зависимостью h f(A/) для номинальной загрузки судна. В установках с винтом регулируемого шага, оборудованных регулятором мощности, зависимость ((J) однозначна. В этом случае можно получить допустимый диапазон изменения оборотов intrc wji- ln i ; (-u« l- H- f llТаким образом, способ управления разогревом (охлаждением) двигателя заключается в том, что замеряют тё-г кущую температуру нагреваемой стен - ки выбранной детали двигателя,, вычисляют допустимый диапазон скачкообразных изменений оборотов вала;- заданные обороты подают на регулятор оборотов в качестве сигнала з.адания, если они лежат в допустимом диапазоне, верхнее (нижнее) значение допустимого диапазона оборотов подают на регулятор оборотов в качестве сигнала задания, если заданные обороты лежат вьше (ниже) допустимого диапазона, по предварительной оценке время набора нагрузки с 80 до 100 % номинальных оборотов п для прогретого двигателя уменьшится на порядок по сравнению с временем нормальной программы разогрева, а время разгона с;удна - на 15-25%. Следует отметить что при этом правление разогревом (охлаждением) вигателя не является управлением на снове имитирующей модели, поскольку процессе управления не решается сновное уравнение теплопроводности, .е. не используется модель объекта. Устройство работает следующим обазом. Блоки 3 и 4 вычисления на основе информации от датчика 2 температуры вырабатывают сигналы, соответствующи границам диапазона максимальн© допустимого изменения оборотов двигателя с учетом его реального состояния. Если заданные обороты лежат в д апазоне Н„„ р-н„„„ блок 5 сравнения через блок 6 логики и коммутатор 7 в соответствии с табл. 1 и 2 подключает к входу следящей системы 8 от задатчика 1. Если сигнал h заданные обороты лежат вне диапазо VMHI«OIKC ° к входу следящей систем 8 подключен сигнал с первого 3 или второго 4 блоков вычисления. При этом происходит разогрев или охлажде ние двигателя и, следовательно, постепенное (в соответствии с разогревом (охлаждением) изменение диапазона мин ммке Разогрев (охлаяу;ение) оказывапрекращается, когда п, на вход ется в диапазоне )(,i.i регулятора 9 подается сигнал (д Блоки 3 и 4 вычисления работают следующим образом. Совокупность резисторов 10-12 и 14 усилителя 21 представляют собой сумматор, выходной сигнал которого пропорционален сумме сигналов на выводах резисторов 10 (смещение) и 14 (вход). На вход сумматора подается сигнал от датчика 2 температуры. Величина смещения выбирается таким образом, что на выходе операционного усилителя 21 блока 3 формируется сигнал, пропорциональный величине (1tt+c), и на выходе усилителя 21 блока 4 - сигнал, пропорциональньй величине () , где V, с,, с - константы. Формирователь аппроксимированной монотонной функции работает следующим образом. При увеличении входного сигнала я определенной величины открывается диод 19, что приводит к уменьшению суммарного сопротивления обратной связи операционного усилителя 22 и уменьшению его коэффициента передачи 4 . Дальнейшее увеличение входного сигнала приводит к открытию диода 20 и дальнейшему уменьшению коэффициента передачи усилителя 22. Величины резисторов 13, 15-18 и напряжения V,() выбираются таким образом, что формирователь реализует функцию tj-A/V Сигнал задания подается на сумматор 26, который формирует сигнал разности заданного и действительного угла поворота вала следящей системы. Сигнал разности усиливается в усилителе 27 и подается на электродвигатель 28, вращение которого приводит к изменению сигнала датчика 30, и при достижении равенства сигнала от датчика 30 и сигнала задания вращение электродвигателя 28 прекращается. Таким образом достигается разогрев и охлаждение двигателя с учетом его реального теплового состояния, что позволяет улучшить маневренные качества судна без термоперегрузок двигателя. Таблица 2
фиг. г
8ияо9
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления судовым дизелем | 1986 |
|
SU1427084A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Устройство для управления работой судового двигателя и гребного винта регулируемого шага | 1983 |
|
SU1128227A1 |
| Устройство программного управления двигателем внутреннего сгорания | 1985 |
|
SU1267028A1 |
| Устройство управления двигательно-движительным комплексом судна с редуктором | 1982 |
|
SU1079543A1 |
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Устройство ограничения частоты вращения двигателя | 1982 |
|
SU1016548A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ГЛАВНОГО СУДОВОГО ДВИГАТЕЛЯ И ГРЕБНОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1991 |
|
RU2037181C1 |
| СИСТЕМА ПРОГРАММНО-ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СУДОВЫМ ГЛАВНЫМ ТУРБОЗУБЧАТЫМ АГРЕГАТОМ | 1973 |
|
SU386382A1 |
| Устройство управления судовой силовой установкой | 1986 |
|
SU1390408A1 |

УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ РАЗОГРЕВОМ И ОХЛАЖДЕНИЕМ СУДОВОГО ДВИГАТЕЛЯ, содержащее задат- . чик оборотов двигателя, программное устройство связанное через следящую систему с регулятором оборотов, о т л и ч а ю щ е е с я тем, что, с целью раслшрения функциональных возможностей оно дополнительно снабжено датчиком температуры двигателя, а программное устройство выполнено в виде -двух блоков вычисления соответственно верхней и нижней границ допустимого диапазона изменения температуры двигателя, блока сравнения, блока логики и коммутатора, причем три входа блока сравнения подключены к коммутатору, а также соответственно к задатчику оборотов и через два блока вычисления - к датчику температуры двигателя, а выход блока сравнения через блок логики связан с входом коммутатора, выход которого подключен к следящей системе. а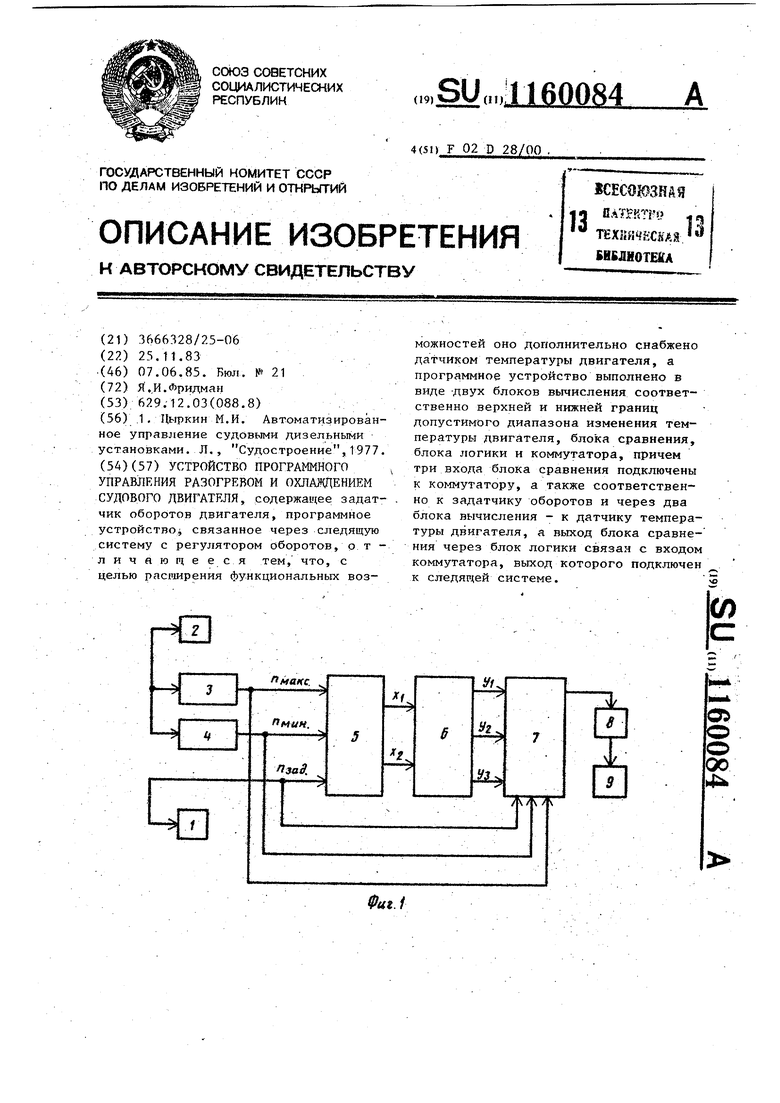
Фиг.З
Фиг.5
Фиг.
Bbfxod
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Л., Судостроение, 1977 | |||
