1
Известны способы сканирования произвольно ориентированного объекта, например клетки, входящей в состав биологического препарата, заключающийся в поэлементно-строчной развертке области, ограниченной контуром объекта.
По предложенному способу поэлементнострочную развертку ведут вдоль радиусов кривизны контура в каждой его точке.
Это позволяет получить информацию, инвариантную к повороту объекта в своей плоскости.
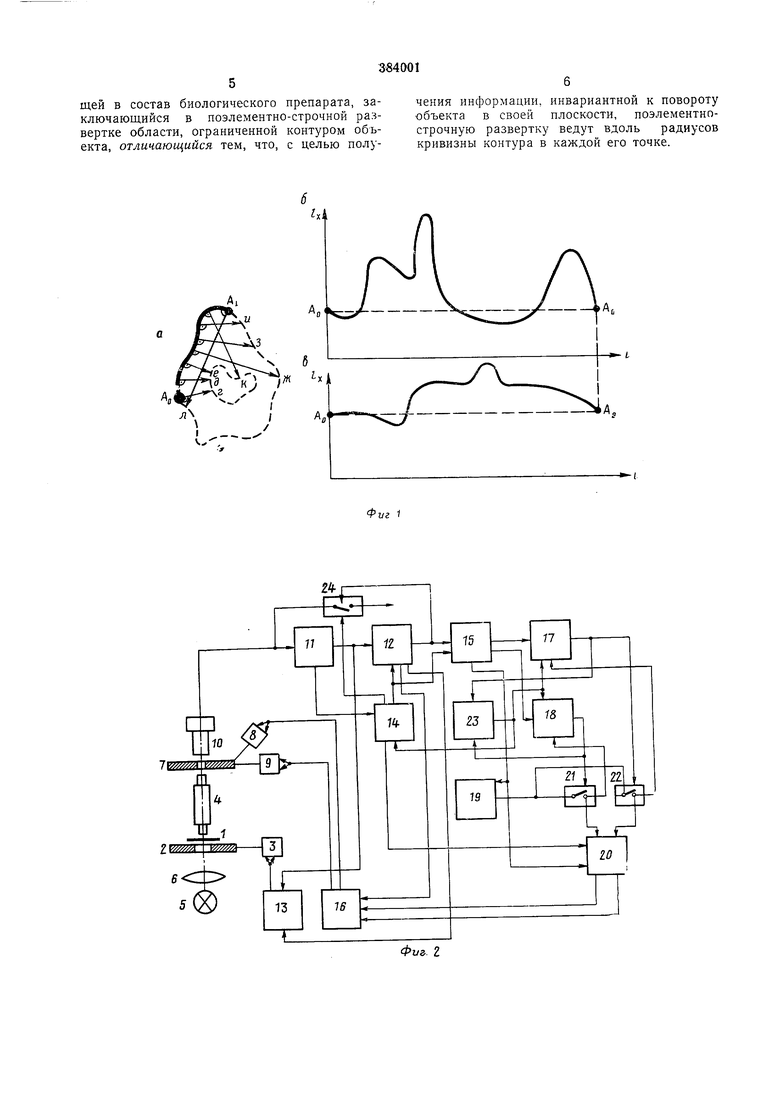
На фиг. 1, а, б и 8 показаны сканируемый объект с направлениями линий сканирования и полученные сканограммы; на фнг. 2 представлена блок-схема устройства для осуществления предложенного способа.
После нахождения объекта по признаку пересечения границы объекта с оптической осью (обнаружение точки АО на контуре) производят с помощью следящей по контуру развертки определение координат текущих точек Л,на контуре объекта для аппроксимации контура элементарными отрезками и по ним определяют направление перпендикуляра к контуру (фиг. , а).
Количество точек на контуре объекта, аппроксимируемое одним элементарным отрезком, выбирается в зависимости от изрезанности контура, необходимой степени его сглаживания и должно быть нечетным. Минимальное число равно трем точкам. Перпендикуляр проводят через среднюю точку, затем осуществляют поэлементное сканирование вдоль направления перпендикуляра во внутреннюю область объекта до пересечения с его границей (точки, г, д, е, ж, з, и, к, л и т. д. на фиг. 1,2). После этого возвращаются к основанию перпендикуляра, переходят к следующей точке контура, повторяют указанную выще операцию последовательно для всех перпендикуляров, проведенных через точки контура объекта, и запоминают совокупность полученных сканограмм.
На ф)иг. 1,6 приведена сканограмма объекта, показанного на фиг. 1,а; на фиг. ,в - сканограмма того же объекта, при отсутствии внутреннего контура (/х - длина хорд сканирования, АО - текущая точка контура, через которую проводят перпендикуляр).
Сканограммы не зависят от ориентации объекта на плоскости препарата, однозначно онределяют объект и могут служить основой для решения задач видовой классификации.
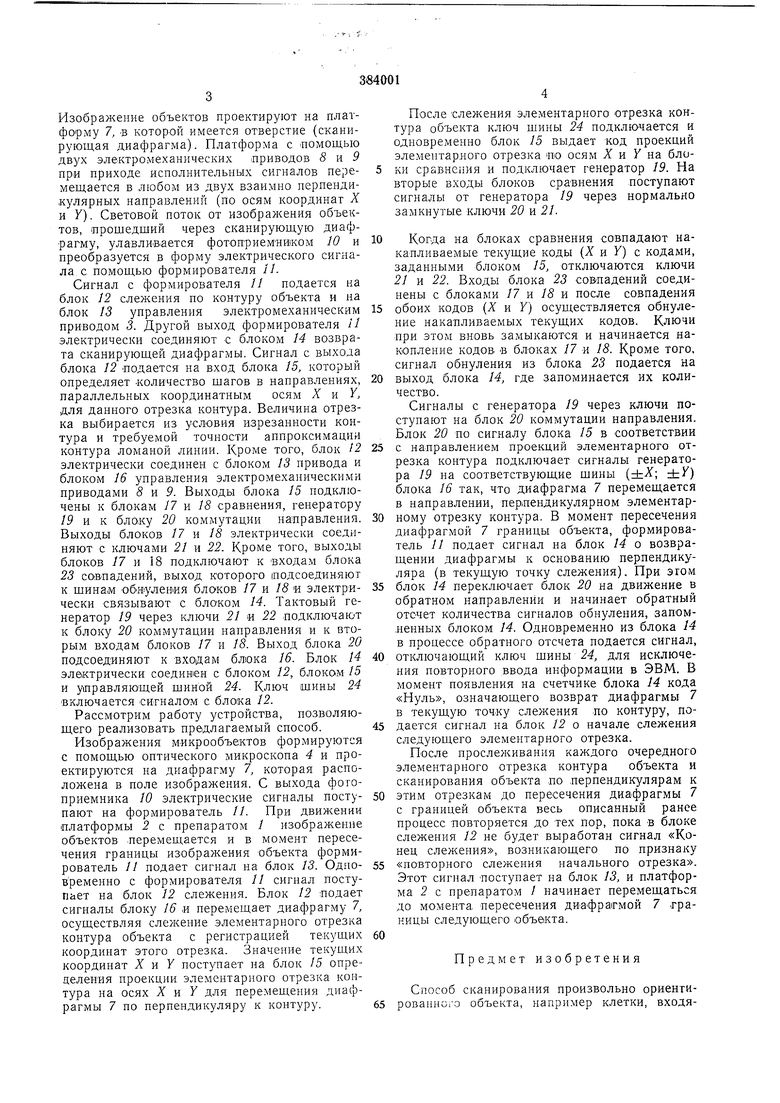
Препарат / (фиг. 2) располагают на платформе 2, которая может перемещаться с помощью электромеханического привода 3, относительно оптической оси неподвижной оптнческой системы микроскопа 4. Препарат освещают источником 5 света через конденсор 6.
Изображение объектов проектируют на платформу 7, в которой имеется отверстие (скаиирующая диафрагма). Платформа с помощыо двух электромеханических приводов S и 5 при приходе исполнительных сигналов перемещается в любом из двух взаимно перпендикулярных направлений (по осям координат X и У). Световой поток от изображения объектов, прошедший через сканируюш,ую диафрагму, улавлив-ается фотоприемнвком 10 и преобразуется в форму электрического сигнала с помош,ью формирователя 11.
Сигнал с формирователя // подается на блок 12 слежения по контуру объекта и на блок /5 управления электромеханическим приводом 3. Другой выход формирователя И электрически соединяют с блоком 14 возврата сканируюш,ей диафрагмы. Сигнал с выхода блока 12 подается на вход блока 15, который определяет количество шагов в направлениях, параллельных координатным осям X и У, для данного отрезка контура. Величина отрезка выбирается из условия изрезанности контура и требуемой точности аппроксимации контура ломаной линии. Кроме того, блок /2 электрически соединен с блоком 13 привода и блоком 16 управления электромеханическими приводами 8 и 5. Выходы блока /5 подключены к блокам /7 и 18 сравнения, генератору /9 и к блоку 20 коммутации направления. Выходы блоков П и 18 электрически соединяют с ключами 21 и 22. Кроме того, выходы блоков /7 и 18 подключают к входам блока 23 совпадений, выход которого (подсоединяют к шинам обнуленйя блоков /7 и 18 и электрически связывают с блоком 14. Тактовый генератор 19 через ключи 21 и 22 подключают к блоку 20 коммутации направления и к вторым входам блоков /7 н /8. Выход блока 20 подсоединяют к входам блока 16. Блок 14 электрически соединен с блоком 12, блоком /5 и управляющей шиной 24. Ключ шины 24 включается сигналом с блока 12.
Рассмотрим работу устройства, позволяюш его реализовать предлагаемый способ.
Изображения м«крообъектов формируются с помошью оптического микроскопа 4 и проектируются на диафрагму 7, которая расположена в поле изображения. С выхода фотоприемника 10 электрические сигналы поступают на формирователь //. При движении платформы 2 с препаратом / изображение объектов перемещается и в момент пересечения границы изображения объекта формирователь // подает сигнал на блок 13. Одновременно с формирователя 11 сигнал поступает на блок 12 слежения. Блок 12 подает сигналы блоку 16 и перемещает диафрагму 7, осуществляя слежение элементарного отрезка контура объекта с регистрацией текущих координат этого отрезка. Значение текущих координат X и К поступает на блок /5 определения проекции элементарного отрезка контура на осях X и У для перемещения диафрагмы 7 по перпендикуляру к контуру.
После Слежения элементарного отрезка контура объекта ключ шины 24 подключается и одновременно блок 15 выдает код проекций элементарного отрезка по осям X и У на блоки сравнения и подключает генератор 19. На вторые входы блоков сравнения поступают сигналы от генератора 19 через нормально замкнутые ключи 20 и 21.
Когда на блоках сравнения совпадают накапливаемые текущие коды (X и F) с кодами, заданными блоком 15, отключаются ключи 21 и 22. Входы блока 23 совпадений соединены с блоками 17 и 18 ii после совпадения обоих кодов (X и У) осуществляется обнуление накапливаемых текущих кодов. Ключи при этом вновь замыкаются и начинается накопление кодов- в блоках 17 и 18. Кроме того, сигнал обнуления из блока 23 подается на выход блока 14, где запоминается их количество.
Сигналы с генератора 19 через ключи поступают на блок 20 ко.ммутации направления. Блок 20 по сигналу блока 15 в соответствии с направлением проекций элементарного отрезка контура подключает сигналы генератора 19 на соответствующие шины (±Х; ±Y) блока 16 так, что диафрагма 7 перемещается в направлении, перпендикулярном элементарному отрезку контура. В момент пересечения диафрагмой 7 границы объекта, формирователь 11 подает сигнал на блок 14 о возвращении диафрагмы к основанию перпендикуляра (в текущую точку слежения). При этом блок 14 переключает блок 20 на движение в обратном направлении и начинает обратный отсчет количества сигналов обнуления, запомненных блоком 14. Одновременно из блока 14 в процессе обратного отсчета подается сигнал, отключающий ключ шины 24, для исключения повторного ввода информации в ЭВМ. В момент появления на счетчике блока 14 кода «Нуль, означающего возврат диафрагмы 7 в текущую точку слежения по контуру, подается сигнал на блок 12 о начале слежения следующего элементарного отрезка.
После прослеживания очередного элементарного отрезка контура объекта и сканирования объекта по .перпендикулярам к этим отрезкам до пересечения диафрагмы 7 с границей объекта весь описанный ранее процесс повторяется до тех пор, пока в блоке слежения 12 не будет выработан сигнал «Конец слежения, возникающего по признаку «повторного слежения начального отрезка. Этот сигнал поступает на блок 13, и платформа 2 с препаратом / начинает перемещаться до момента пересечения диафрагмой 7 границы следующего объекта.
Предмет изобретения
Способ сканирования произвольно ориентированного объекта, например клетки, входящей в состав биологического препарата, заключающийся в поэлементно-строчной развертке области, ограниченной контуром объекта, отличающийся тем, что, с целью получения информации, инвариантной к повороту объекта в своей плоскости, поэлементнострочную развертку ведут вдоль радиусов кривизны контура в каждой его точке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания и распознавания изображений микрообъектов | 1980 |
|
SU898466A1 |
| Устройство для распознавания изображений объектов | 1976 |
|
SU596980A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| УСТРОЙСТВО ДЛЯ ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU388250A1 |
| УСТРОЙСТВО для СКАНИРОВАНИЯ ИЗОБРАЖЕНИЯ МИКРООБЪЕКТОВ | 1973 |
|
SU367435A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| Телевизионное поисково-следящее устройство | 1977 |
|
SU682880A1 |
| Устройство для считывания и распознавания изображений на карте с электропроводящими элементами | 1983 |
|
SU1124348A1 |
| УСТРОЙСТВО для ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU394821A1 |