1
Изобретение относится к области автоматики и вычислительной техники.
Известны устройства для фотоследящего копирования чертежей, содержащие считывающую головку с координатными приводами и фотодатчиками, соединенными с блоками формирования считываемых сигналов, соответствующих внутренней и внешней орбитам развертки, входы которых соединены с блоком автоматического торможения, подключенным к блоку формирования эквивалентов координатных скоростей считывающей головки, и линию задержки.
Известные устройства имеют следующие недостатки:
относительно большая амплитуда высокочастотного дрейфа центра копирования относительно оси копирования при безынерционных координатных приводах, обусловленная случайными ошибками считывания,, помехами и т. п.;
нестабильность точности копирования во времени под действием разного рода дестабилизирующих факторов;
погрешности копирования, обусловленные ошибками преобразования сигнала слежения в координатные скорости считывающей фотоголовки.
С целью устранения указанных недостатков в устройство введен измерительно-запоминающий узел, соединенный с блоком формирования сигналов от внутренней орбиты развертки и со входом линии задержки, другой вход которой подключен к блоку формирования
сигналов от внешней орбиты развертки, а выход линии задержки соединен с управляющим входом блока формирования эквивалентных координатных скоростей считывающей головки, а измерительно-запоминающий узел содержит две группы из двух последовательно соединенных линий задержки, причем выходы первых линий задержки и вторых линий задержки каждой группы соединены через соответствующие схемы совпадения со входами
реверсивного счетчика, выход которого подключен к преобразователю «код-напряжение.
Для повышения чувствительности и точности измерения смещения центра копирования
с оси копирования и повышения эффективности фазовой коррекции упомянутый измерительно-запоминающий узел, который вырабатывает управляющий сигнал для коррекции фазы сигнала канала считывания ло внешней
орбите развертки, выполнен в следующем виде: две группы из не менее двух включенных последовательно линий задержки подключены к двум выходам формирователя первичного сигнала канала считывания по внутренней
орбите развертки, на которых электрические
импульсы возникают поочередно в моменты пересечения копируемой линии считывающим лучом с обеих сторон от центра копирования; выход первой линии задержки первой группы и выход второй группы посредством логинеской схемы совпадения подключен к суммирующему (вычитающему) входу реверсивного счетчика электрических импульсов и подобным образом выходы двух других линий задержки - к вычитающему (суммирующему) входу того же реверсивного счетчика; последний снабжен преобразователем «код-напряжение, выход которого является выходом измерительно-запоминающего узла.
Для обеспечения равных условий копироваНИИ в одном и противоположном направлениях обхода конируемого контура, измерительно-запоминающий узел снабжен цепью переключения входов упомянутого реверсивного счетчика, которая имеет управляющий вход, связанный с переключателем направления обхода копируемого контура, и блокирующий вход, подключенный к выходу формирователя сигнала блокировки, вход которого связан с разрядными выходами упомянутого реверсивного счетчика.
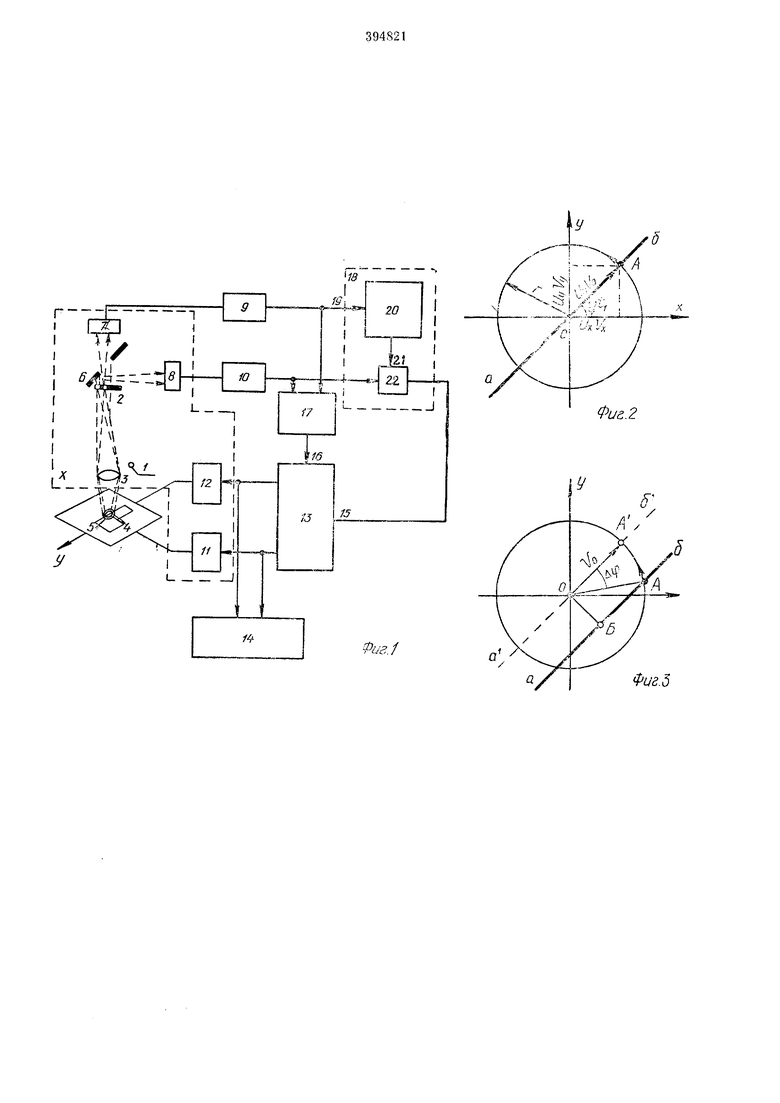
На фиг. 1 изображена блок-схема устройства; фиг. 2 поясняет принцип определения координатных скоростей перемещения считывающей фотоголовки относительно чертежа; фиг. 3 поясняет возникновение ошибки копирования вследствие ошибки преобразования фазового отсчетного угла в угол наклона прямолинейной траектории к отсчетной координатной оси X; на фиг. 4 и 5 показана траектория перемещения центра копирования в идеальной следящей системе при воздействии случайных помех; фиг. 6 поясняет понятие угла коррекции; фиг. 7 поясняет образование угла коррекции; на фиг. 8 изображена блок-ехема блока коррекцпи; на фиг. 9 изображепы эпюры напряжений, поясняющие работу блока коррекции; на фиг. 10 показана диаграмма работы задержек при формировании сигнала коррекции; фиг. 11 поясняет принцип получения информации для формирования корректирующего сигнала; на фиг. 12 изображена блок-схема измерительно-запоминающего узла блока коррекции.
В фотоследящем устройстве (фиг. 1) фазовое считываиие линии контура чертежа-конира осуществляется посредством круговой развертки линии контура считывающей головкой .
Развертывающая диафрагма 2 считывающей головки 1 с двумя отверстиями расположена в плоскости действительного изображения контура чертежа-копира, созданной объективом 3. По этой причине через отверстия развертывающей диафрагмы 2 проходят световые потоки, отраженные от площадок чертежа-копира, которые являются аналогичными изображениями отверстий в плоскости чертежа. Отверстие, расположенное ближе к оси вращения диафрагмы 2, и объектив 3 формируют считывающий луч внутренней орбиты 4 развертки и соответственно отверстие, расположенное дальше - считывающий луч внешней орбиты 5 развертки.
Считывающий луч внутренней орбиты 4 развертки через осевое отверстие в зеркале 6 попадает на фотодатчик 7 внутренней орбиты развертки.
Считывающий луч внешней орбиты 5, отраженный зеркалом 6, воздействует на фотодатчик 8.
Фотодатчики 7 и 8 снабжены формирователями 9 и W первичных сигналов.
Развертывающая диафрагма 2, фотодатчик 7 и формирователь 9 сигнала фотодатчика составляют первый канал считывания.
Второй канал - диафрагма 2, зеркало 6, фотодатчик 8 и формирователь W.
Перемещение считывающей головки / относительно чертежа-копира по каждой из ортогональных координат X к У осуществляется посредством координатных, например шаговых, приводов 11 и 12, входы которых подключены к выходам формирователя 13 эквивалентов (например частот) координатных скоростей. Система координатных приводов 14 управляемой машины подключена парал.чельно упомянутым координатным приводам 11 и 12 считывающей головки /.
Формирователь 13 эквивалентов координатных скоростей имеет управляющий вход /5 и дополнительный вход 16.
Последний подключен к выходу формирователя 17 сигнала на автоматическое торможение. Первый и второй входы упомянутого формирователя подключены соответственно к выходу формирователей 9 и 10.
Управляющий вход 15 формирователя 13 эквивалентов координатных скоростей подключен к выходу формирователя 10 первичного сигнала фотодатчика 8 внешней орбиты развертки последовательно через блок 18 коррекции фазы сигнала внешней орбиты развертки. При этом управляющий вход 19 блока 18 коррекции фазы связан с выходом формирователя 9 первичного сигнала фотодатчика 7 внутренней орбиты развертки.
Блок 18 коррекции фазы сигнала внешней орбиты развертки содержит измерительно-запоминающий узел 20, выход которого подключен к управляющему входу блока задержки 21.
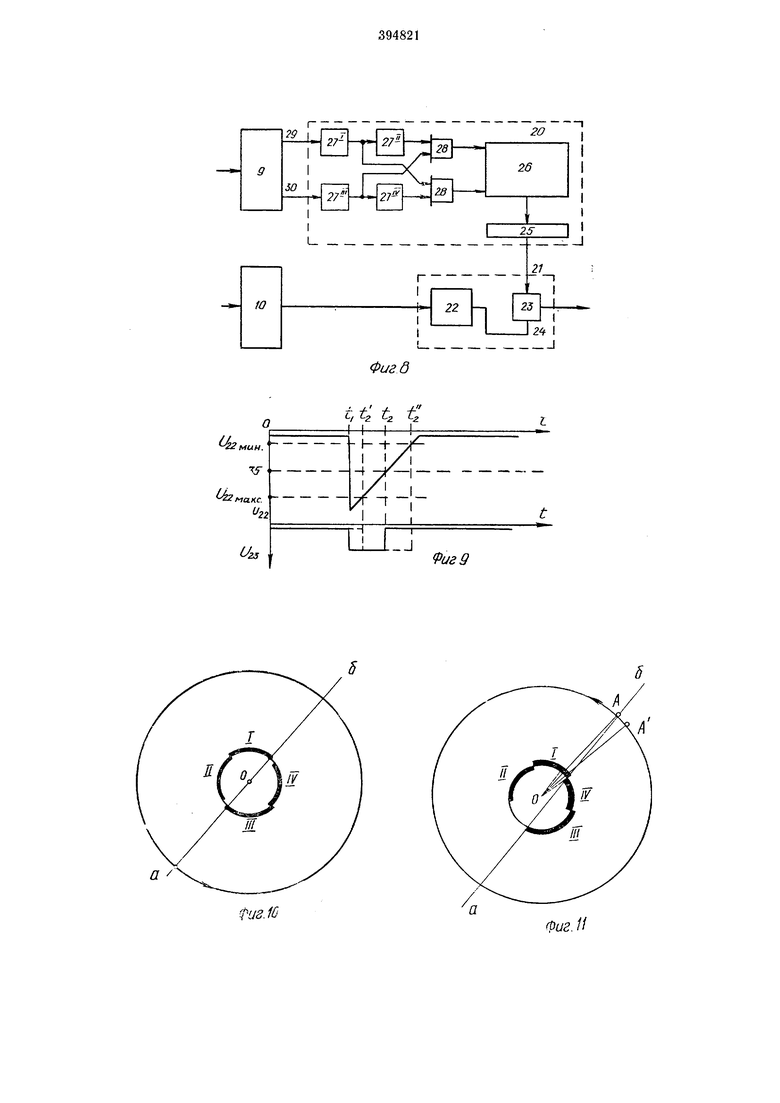
Блок 18 коррекции имеет следующую струкПФУБлок задержки 21 (фиг. 8) выполнен на основе ждущего генератора 22 пилообразного напряжения и потенциального нуль-органа 23. К первому входу 24 нуль-органа 23 подключен выход упомянутого генератора, а ко второму входу, являющемуся управляющим входом блока задержки 21, подключен выход преобразователя 25 «код-напряжение. Разрядные входы данного преобразователя подключены к соответствующим разрядным выходам реверсивного счетчика 26. Измеритель
ная часть измерительно-запоминающего узла 20 состоит из четырех линий задержек 27 - и двух схем 28 совиадения.
Линии задержки 27 и 27 подключены к первому выходу 29 (фиг. 8) формирователя 9 сигнала внутренней орбиты развертки.
На данном выходе электрический импульс возникает в момент пересечения считывающим лучом на внутренней орбите развертки копируемой линии а-б (фиг. 10) впереди по направлению движения, а на втором выходе 30 - при пересечении копируемой линии сзади по направлению копирования.
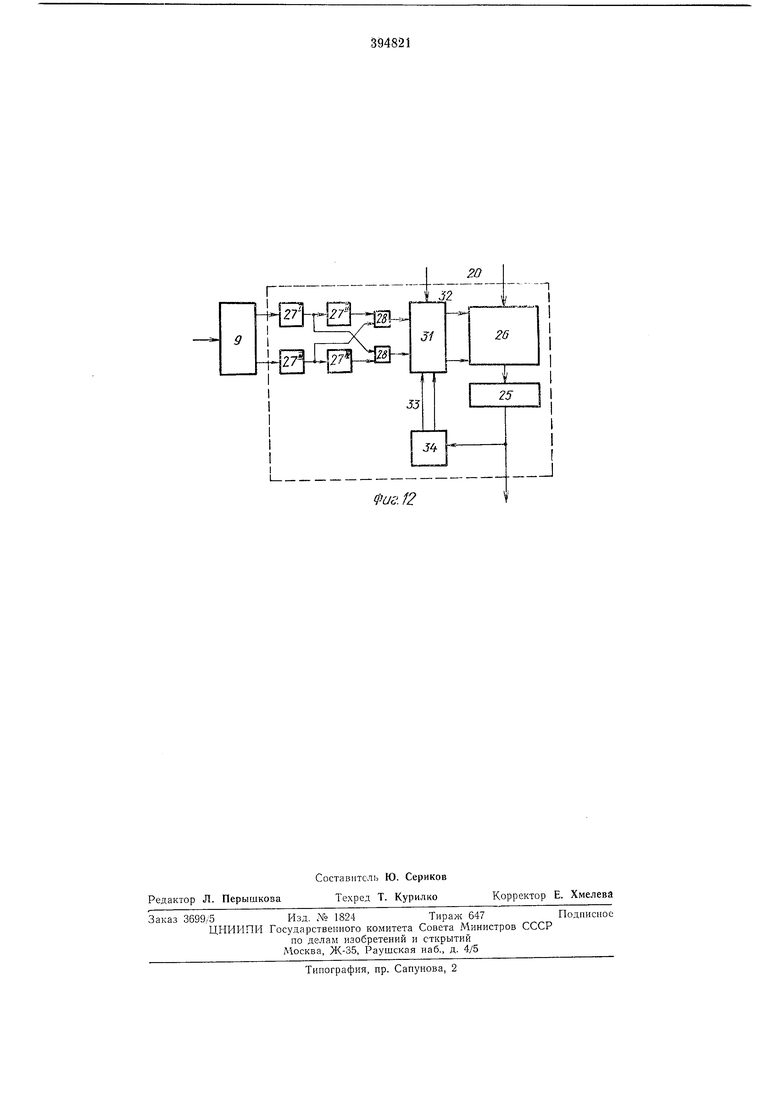
Измерительно-запоминающий узел 20 (фиг. 1, 8 и 12) снабжен коммутирующей цепью 31, имеющей управляющий вход 32 и блокируЕОЩий вход 33. На управляющий вход 32 подается сигнал направления обхода коннруемого контура.
К блокирующему входу 33 подключен выход формирователя 34 сигнала блокировки. Вход данного формирователя подключен к разрядным выходам реверсивного счетчика 26.
Прежде чем перейти к описанию работы фотоследящего устройства, рассмотрим кратко принцип фотоследящего копирования линии чертежа при ее фазовом считывании оптическим лучом.
Процесс фотоследящего копирования заключается в определении координатных составляющих вектора скорости перемещения фотоголовки вдоль линии копируемого контура по сигналу фотодатчика.
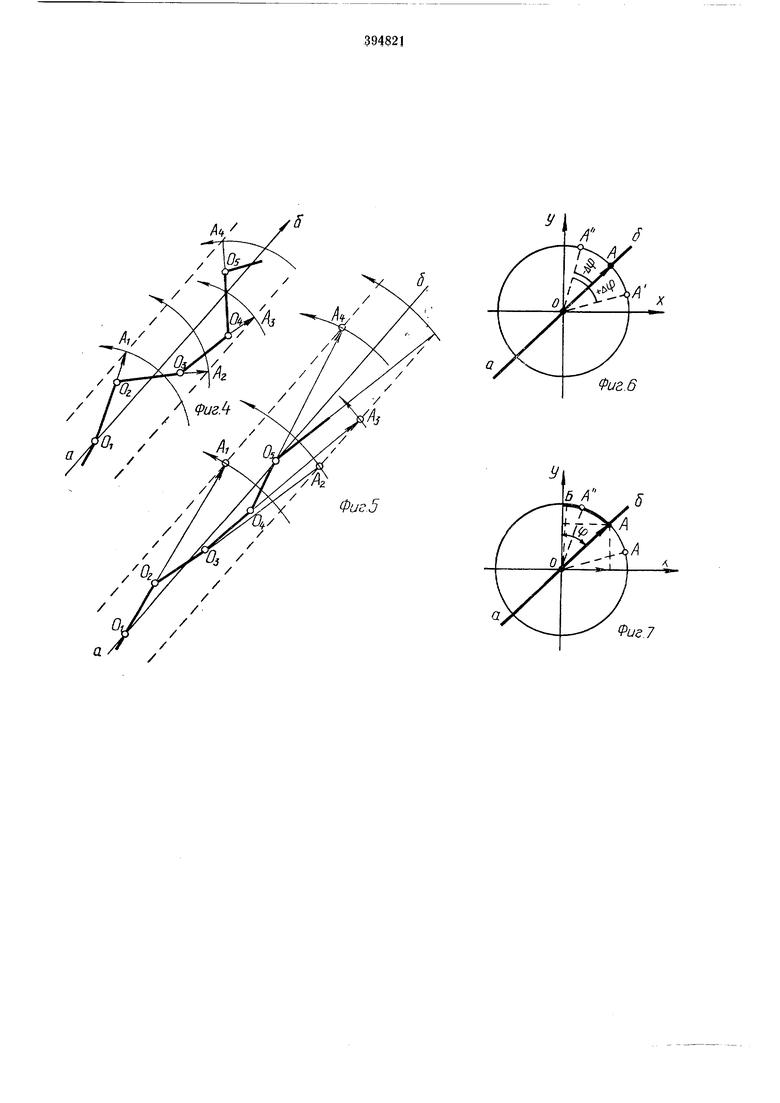
Определение координатных скоростей перемещения считывающей фотоголовки относительно чертежа поясняется на фиг. 2. Здесь для упрощения принято, что копируемая линия а-б не имеет щирины и считывающий луч обладает нулевой аппертурой.
Оптическая ось считывающей фотоголовки, пересекая плоскость чертежа, образует центр О копирования. Вокруг этого центра считывающий луч движется по круговой орбите с радиусом г. Он вращается с синхронной скоростью со, обусловленной вектором неременного напряжения Lo.
Движение считывающего луча обусловливается вращением развертывающей диафрагмы 2, которое осуществляется синхронным электродвигателем (на чертеже не показан), питаемым переменным напряжением LO.
Если центр О копирования находится на копируемой линии а-б, то для его перемещения по этой линии в направлении от а к б необходимо, чтобы координатные составляющие Vx и Vy вектора Уо полной скорости считывающей головки были пропорциональны мгновенным значениям косинусоидальной Их и синусоидальной Uy составляющим вектора UQ в момент времени ь когда считывающий луч пересекает копируемую линию а-б в точке А. На фиг. 2 упомянутые векторы UQ и УО показаны численно равными.
Мгновенное значение вектора УО, определенное в указанный момент времени t, в
дальнейшем называется вектором упреждения, а точка Л пересечения копируемой линии считывающим лучом впереди по направлению движения- упрежденной точкой копирования. Мгновенные значения косинусоидальной и синусоидальной составляющих вектора Uu полного напряжения, пропорциональные координатным составляющим вектора УО, обычно определяются из квадратурного опорного
напряжения, адекватного угловой скорости развертывающей диафрагмы 2, по сигналу, поступающему с формирователя 10 первичного сигнала фотодатчика 8. Упомянутое квадратурное опорное напряжение образует «электрическую измерительную систему координат, которая моделирует систему ортогональных координат, образованных направляющими считывающей фотоголовки.
Преобразование мгновенных значений опорного напряжения, определенных в момент времени пересечения считывающим лучом копируемой линии а-б впереди по направлению движения, в эквиваленты координатных
скоростей неремещения считывающей фотоголовки относительно чертежа-копира, производится фор.мирователем 13 упомянутых аналогов.
При безощибочном преобразования Ux, у
в Ух и У,, величина радиуса г орбиты развертки ие играет роли. Центр О копирования будет перемещаться точно по линии а-б.
Однако подобные преобразования всегда происходят с некоторой ощнбкой. Вследствие
этого центр О копирования будет стремиться уйти с копируемой линии (из-за несовпадения вектора упреждения и вектора t/o) (фиг. 3). Но так как система фотоследящего копирования замкнута, она будет стремиться
возвратить центр копирования на линию а-б. В результате центр О копирования будет перемещаться по некоторой эквидистантной линии а-б. В данном случае ощибка копирования равна отрезку ОБ. Она компенсируется в следящей системе появлением угла Дф рассогласования вектора упреждения (ОА) и вектора полной скорости УО. Значение ощибки копирования будет тем больше, чем больще радиус г орбиты развертки.
Следовательно, для повышения точности конИ|рования радиус орбиты развертки должен выбираться возможно меньшим, но при этом обостряются другие недостатки.
На фиг. 4 и 5 показана траектория перемещения центра О копирования в идеальной следящей системе, не имеющей инерционных звеньев при налнчии ошибки определения момента времени пересечения считывающим лучом копируемой линии.
Подобные ошибки всегда имеют место, и они обусловлены многими причинами, например шероховатостями и размытостями реальной копируемой линии, ошибками формирования первичного сигнала, электрическими помехами. Сигнал о пересечении считывающим лучом ко1пируемой линии под действием подобных ошибок с .некоторой степенью вероятности появляется в полосе, посередине которой проходит копируемая линия а-б (фиг. 4). Пусть в некоторый момент времени центр О копирования находится на копируемой линии в точке Oi, упрежденная точка Л копирования появляется в точке А-,. Начиная с данного момента времени центр О копирования будет перемещаться по прямой в направлении упрежденной точки копирования А. За один оборот считывающего луча (до следующего определения положения учрежденной точки копирования Л2) центр О копирования сместится в точку 0. После этого направленне неремещения центра конирования изменится скачком в направлении к новой упрежденной точке копирования А и т. д. Так как положение каждой последующей упрежденной точки копирования около линии а-б из-за помех случайно, центр О копирования движется но -ломаной линни, которая «укладывается в полосу дрейфа. Всле дствие этого возникают вибрации в механических конструкциях следящей системы. Па координатные приводы 14 (фиг. 1) мащины поступает широкий спектр входных воздействий, что затрудняет их работу. Величина амплитуды дрейфа центра О копирования около оси копирования а-б зависит от соотнощения величины вектора упреждения и пути перемещения центра О копироваиия за один оборот считывающего луча. Чем больше скорость копирования, т. е. чем больше путь перемещения центра копирования за один нериод развертки, тем меньще плавность перемещения считывающей фотоголовки. Для скоростей копирования, достигающих значения 1 м.1мин, которых требуют современные координатные масщтабные машины для термической вырезки изделий из листового металла, путь перемещения центра О копирования за один период развертки практически равен вектору упреждения. Так, при (0 314 - (частота сети), м/мин путь перемещения считывающей головки за один период развертки составит 0,33 мм. В известных же системах значение вектора упреждения (радиуса г орбиты развертки) выбирается в пределах 0,2-ьО,3 мм. Для повышения плавности движения считывающей головки необходимо увеличивать значение вектора уиреждения (фиг. 5). На стабильность работы следящей системы оказывает влияние также «нежесткость центра копирования относительно оси копирования, обусловленная люфтами и упругими натягами кинематических звеньев следящ ей системы (на чертеже не показано). В данном случае при размещении следящей системы на самой управляемой мащине возникает нежелательное смещение центра копирования под действием инерционных сил. Для уменьщения фазовой ощибки определения направления неремещения цер1тра конироваиия значение вектора упреждения также необходимо увеличивать. В противном случае, особенно при достаточно высоком быстродействии приводов мащины, система управления мащиной в целом становится динамически неустойчивой. Таким образом, для новыщения статической точности копирования радиус г орбиты развертки необходимо уменьшать, а для улучщення динамических свойств устройства его необходимо увеличить. Настоящее предложение устраняет это противоречие. В устройстве согласно изобретению (фиг. 1) изменилось назначение считывающего канала по внутренней орбите 4 развертки и капала считывания по внещней орбите 5 развертки. Информация с внешней орбиты 5 развертки используется для определения координатных составляющих вектора нолной скорости, а информация с внутренней орбиты 4 развертки иснользуется для коррекции фазы сигнала внещней орбиты развертки. Использование информации, считываемой по обоим каналам для формирования торможения, остается прежним. При такой организации фотоследящего устройства достигается высокая плавность движения считывающей головки и машины за счет большого значения вектора упреждения, а статическая ошибка копирования (фиг. 3), вызванная ногрещностью преобразования координатных составляющих вектора упреждения в эквиваленты координатных скоростей, компенсируется дополнительным фазовым сдвигом вектора упреждения сигнала большой орбиты по информации сигнала с внутренней орбиты развертки на угол ±Дф (фиг. 6). Способ сдвига вектора унреждения в сторону опережения -Дф и отстаивания +Аф ноясняется фиг. 7. Положение считывающего луча относительно лериода опорного напряжения сдвигается по фазе в сторону опережения (точка В) на некоторый угол, например, новоротом статора двигателя развертки. Пересечение упомянутым лучом копируемой линии а-б в точке А наступит несколько раньще. Пара мгновенных значений опорного квадратурного напряжения в даном случае не будет моделировать начения координатных скоростей считываюН1.ей головки, т. е. возникает сдвиг но фазе змерительной «электрической системы кординат. Устранение этого сдвига достигаетя задержкой электрического импульса на ремя, которое равно части периода, соответтвующей введенному фазовому сдвигу (дуга -А). Уменьщением времени задержки достигаетя опережающий дополнительный фазовый двиг вектора упреждения, а увеличением - апаздывающий фазовый сдвиг.
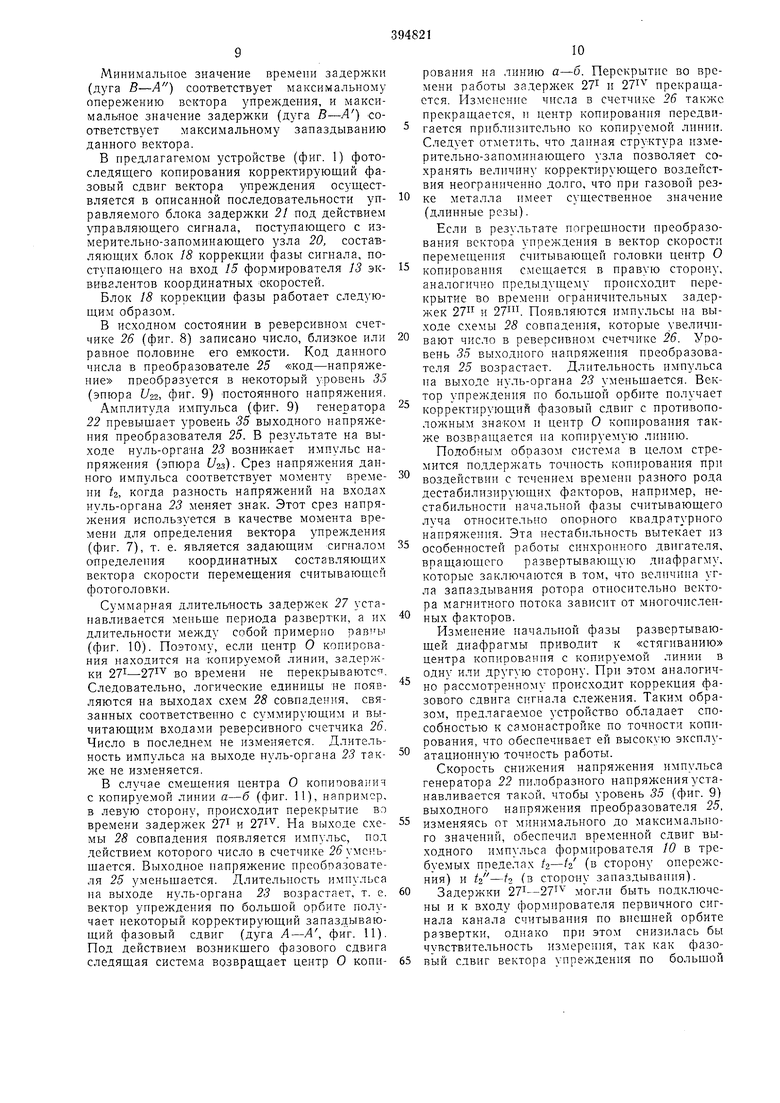
Минимальное значение времени задержки (дуга В-А) соответствует максимальному опережению вектора упреждения, и максимальное значение задержки (дуга В-Л) соответствует максимальному запаздыванию данного вектора.
В предлагагемом устройстве (фиг. 1) фотоследящего копирования корректирующий фазовый сдвиг вектора упреждения осуществляется в описанной последовательности управляемого блока задержки 21 под действием управляющего сигнала, поступающего с измерительно-запоминающего узла 20, составляющих блок 18 коррекции фазы сигнала, поступающего на вход 15 формирователя 13 эквивалентов координатных окоростей.
Блок 18 коррекции фазы работает следующим образом.
В исходном состоянии в реверсивном счетчике 26 (фиг. 8) записано число, близкое или равное половине его емкости. Код данного числа в преобразователе 25 «-код-напряжение преобразуется в некоторый уровень 35 (эпюра 1/22, фиг. 9) постоянного напряжения.
Амплитуда импульса (фиг. 9) генератора 22 превыщает уровень 35 выходного напряжения преобразователя 25. В результате на выходе нуль-органа 23 возникает импульс напряжения (эпюра f/23). Срез напряжения данного импульса соответствует моменту времепи t2, когда разность напряжений на входах нуль-органа 23 меняет знак. Этот срез напряжения используется в качестве момента времени для определения вектора упреждения (фиг. 7), т. е. является задающим сигналом определения координатных составляющих вектора скорости перемещения считывающей фотоголовки.
Суммарная длительность задержек 27 устанавливается меньше периода развертки, а их длительности между собой примерно (фиг. 10). Поэтому, если центр О копирования находится на копируемой линии, задержки во времени не перекрываются. Следовательно, логические единицы не появляются на выходах схем 28 совпадения, связанных соответственно с суммирующим и вычитающим входами реверсивного счетчика 26. Число в последнем не изменяется. Длительность импульса на выходе нуль-органа 23 также не изменяется.
В случае смещения центра О копиоованич с копируемой линии а-б (фиг. 11), например, в левую сторону, происходит перекрытие во времени задержек 27 и 27. На выходе схемы 28 совпадения появляется импульс, под действием которого число в счетчике 2бумсньщается. Выходное напряжение преобразователя 25 уменьщается. Длительность импульса на выходе нуль-органа 23 возрастает, т. е. вектор упреждения по больщой орбите получает некоторый корректирующий запаздывающий фазовый сдвиг (дуга А-А, фиг. И). Под действием возникщего фазового сдвига следящая система возвращает центр О копирования на линию а-б. Перекрытие во времени работы задержек 27 и прекращается. Пзмененпе чпсла в счетчике 26 также прекращается, н центр копирования передвигается приблизительно ко копируемой линии. Следует отлгетить, что данная структура измерительно-запоминающего узла позволяет сохранять величину корректирующего воздействия неограниченно долго, что при газовой рез0ке металла имеет существенное значение (длинные резы).
Если в результате погрещности преобразования вектора упреждения в вектор скорости перемещения считывающей головки центр О
5 копирования смещается в правую сторону, аналогично предыдущему пропсходит перекрытие во времени ограничительных задержек 27 и 27. Появляются импульсы на выходе схемы 28 совпадения, которые увеличи0вают число в реверсивном счетчике 26. Уровень 35 выходного напряжения преобразователя 25 возрастает. Длительность импульса па выходе нуль-органа 23 уменьщается. Вектор упреждения по больщой орбите получает
5 корректирующий фазовый сдвиг с противоположным знаком и центр О копирования также возвращается па копируемую линию.
Подобным образом система в целом стремится поддержать точность копирования при
0 воздействии с течением времени разного рода дестабилизирующих факторов, например, нестабильности начальной фазы считывающего луча относительно опорного квадратурного напряжения. Эта нестабтмьность вытекает из
5 особенностей работы синхронного двигателя, вращающего развертывающую диафрагму, которые заключаются в том, что величина угла запаздывания ротора относительно вектора магнитного потока зависит от многочислен0ных факторов.
Изменение начальной фазы развертывающей диафрагмы приводит к «стягиванию центра копирования с копируемой линии в одну или другую сторону. При этом аналогич5но рассмотренному происходит коррекция фазового сдвига сигнала с,. Таким образом, предлагае:мое устройство об,1адает способностью к самонастройке по точности копирования, что обеспечивает ей высокую эксплу0атационную точность работы.
Скорость снижения напряжения импульса генератора 22 пилобразного напряжения устанавливается такой, чтобы уровень 35 (фиг. 9) выходного напряжения преобразователя 25,
5 изменяясь от минимального до максимального значений, обеспечил временной сдвиг выходного импульса формирователя 10 в требуемых пределах /2-4 (в сторону опережения) и (з сторону запаздывания).
Задержки могли быть подключены и к входу формирователя первичного сигнала канала считывания по виещней орбите развертки, однако при этом снизилась бы чувствительность измерения, так как фазовый сдвиг вектора упреждения по больщой
орбите, обусловленный смещением центра копирования с оси копировяния (фиг. 12), значительно меньше фазового сдвига вектора упреждения по внутренней орбите.
Блок-схема измерительно-запоминающего узла 20 поясняет только основную сущность формирования сигнала коррекции. Здесь не отражены требования сохранения корректирующего действия цри изменении направления копирО|Вания защиты реверсивного счетчика 26 от переполнения.
При реверсе направления перемещения центра О копирования упрежденной точкой копирования становится точка Б (фиг. И). В данном случае для возврата центра О на ось копирования вектору упреждения О-Б обратного направления копирования необходимо сообщить корректируюнтий сдвиг по фазе в сторону опережения, тогда как вектору ОА сообщается запаздывающий кооректирующий сдвиг. Следовательно, при реверсе направления копирования необходимо производить взаимное переключение входов реверсивного счетчика 26. Эту задачу вьтолняет цепь 31 переключения и блокировки (фиг. 12) по сигналу, поступающему на управляющий вход 32. Цепь 31 переключения входов счетчика 26 производит также отключение реверсивного счетчика 26 по суммирующему входу или по вычитающему входу, если уровень 35 (фиг. 9) достигает соответственно уровня t/22 мпкс или уровня Uzz мин. при этом исключается возможность переполнения реверсивного счетчика. Команды на указанную коммутацию вырабатываются формирователем 34 сигнала блокировки и поступают на блокирующий вход 33 цепи 31 переключения.
Формирователь 34 сигнала блокировки может быть выполнен в виде схем совпадения, определяющих состояние разрядов реверсивного счетчика 26 соответственно минимальной емкости, например, п... 3,2,1 или О и соответственно максимальной емкости.... , или в зависимости от принятых уровней Uzzvim или С/22 макс (фИГ. 9) ВЫХОДНОГО напряжения преобразователя 25.
Предмет изобретения
1.Устройство для фотоследящего копирования чертежей, содержащее считывающую головку с координатными приводами и фотодатчиками, соединенными с блоками формирования считываемых сигналов, соответствующих внутренней и внешней орбитам развертки, входы которых соединены с блоком автоматического торможения, подключенным к блоку формирования эквивалентов координатных скоростей считывающей головки, линию задержки, отличающееся тем, что, с целью повышения точности копирования в устройство введен измерительно-запоминающий узел, соединенный с блоком формирования сигналов от внутренней орбиты развертки и со входом линии задержки, другой вход которой подключен к блоку формирования сигналов от внешней орбиты развертки, а выход линии задержки соединен с управляющим входом блока формирования эквивалентных координатных скоростей считывающей головки.
2.Устройство по п. I, отличающееся тем, что измерительно-запоминающий узел содержит две группы из двух последовательно соединенных линий задержки, причем выходы первых линий задержки и вторых линий задержки каждой группы соединены через соответствующие схемы совпадения со входами реверсивного счетчика, выход которого подключен к преобразователю «код-напряжение.
/
/1,
/
ФигЗ
Фиг.6
ие.7
а /
TU8.10
фиг. //
Фиг. 12
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU388250A1 |
| ФОТОКОПИРОВАЛЬНАЯ СЛЕДЯЩАЯ СИСТЕМА С КРУГОВЫМ СКАНИРОВАНИЕМ КОПИРУЕМОЙ ЛИНИИ | 1973 |
|
SU399831A1 |
| ФОТОКОПИРОВАЛЬНАЯ СЛЕДЯЩАЯ СИСТЕМА С КРУГОВЫМ СКАНИРОВАНИЕМ ЧЕРНО-БЕЛОГО ПЕРЕХОДА КОПИРУЕМОЙ | 1973 |
|
SU397945A1 |
| Устройство для фотоследящего копирования | 1987 |
|
SU1476504A1 |
| Устройство для фотоследящего копирования | 1978 |
|
SU744661A1 |
| Устройство для фотоследящегоКОпиРОВАНия | 1979 |
|
SU798917A1 |
| Устройство для копирования смежныхКОНТуРОВ | 1978 |
|
SU795787A1 |
| Устройство для измерения ошибки сведения лучей на экране цветного кинескопа | 1980 |
|
SU1042208A1 |
| Фотокопировальная система | 1974 |
|
SU484067A1 |
| Устройство для автоматического копирования линии сварного соединения | 1983 |
|
SU1133060A1 |