Изобретение относится к телевизионным следящим системам и предназначено для определения координат подвижных объектов. Измеритель может быть использован в системах астроориентации и астронавигации, стыковки космических аппаратов, слежении за факелами ракет, определения параметров атмосферы и т. д.
Целью изобретения является повышение точности измерения путем обеспечения коррекции при возрастании флуктуаций и уменьшения погрешности экстраполяции.
На фиг. 1 представлена структурная электрическая схема телевизионного адаптивного измерителя координат; на фиг. 2 приведена функция экстраполяции; на фиг. 3 дана структурная схема синхрогенератора; на фиг. 4 дана структурная схема дискриминатора с нормированием; на фиг. 5 дана структурная схема формирователя сигнала производной экстраполяционного приращения; на фиг. 6 приведены эпюры напряжений, поясняющие работу телевизионного адаптивного измерителя координат; на фиг. 7 дана структурная схема формирователя сигналов весовых функций; на фиг. 8 дана структурная схема корректора; на фиг. 9 дана структурная схема блока вычисления параметров экстраполяции.
Телевизионный адаптивный измеритель координат (фиг. 1) содержит фотоэлектронный преобразователь (ФЭП) 1, видеоусилитель 2, аналого-цифровой преобразователь (АЦП) 3, умножитель 4, формирователь опорного сигнала (ФОС) 5, синхрогенератор 6, формирователь сигнала локальной развертки (ФСЛО) 7, два канала измерения по координатам Х и Y 8. 9, состоящих каждый из счетчика 10, дискриминатора с нормированием 11, блока масштабирования 12, сумматора 13, цифрового интегратора 14, сдвигающего регистра 15, блока вычисления параметров экстраполяции (ВВПЭ) 16, цифро-аналогового преобразователя (ЦАП) 17, блока элементов И 18, формирователя сигнала "Запись-сброс" 19, корректора 20 и формирователя сигнала производной экстраполяционного приращения (ФСПЭП) 21, а также блок 22 измерения контраста (ВИК), формирователь 23 сигналов весовых функций (ФСВФ).
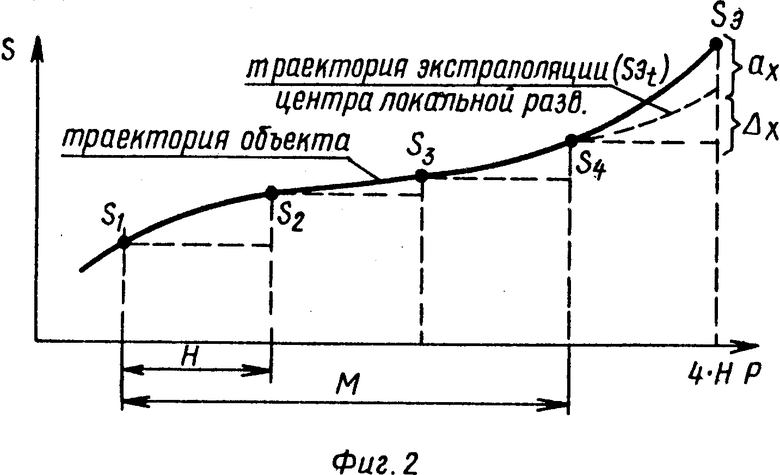
На фиг. 2 на временном интервале Р(t) для канала Х поясняется алгоритм работы. Здесь S1, S2. S3 и S4 - значения опорных координат объекта, фиксируемых в памяти сдвигающего регистра 15 канала (при четырех точечной аппроксимации траектории). Здесь Δx - экстраполяционное приращение цикла сканирования; qx - ошибка "невязки" траектории объекта и центра локальной развертки, формируемая на выходе дискриминатора с нормированием 11.
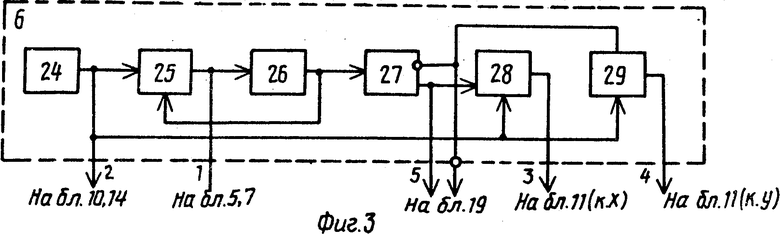
Синхрогенератор (фиг. 3) содержит последовательно соединенные генератор тактовых импульсов (ГТИ) 24, счетчик 25, дешифратор кода Z импульсов 26, триггер 27 и первый и второй элементы И 28 и 29.
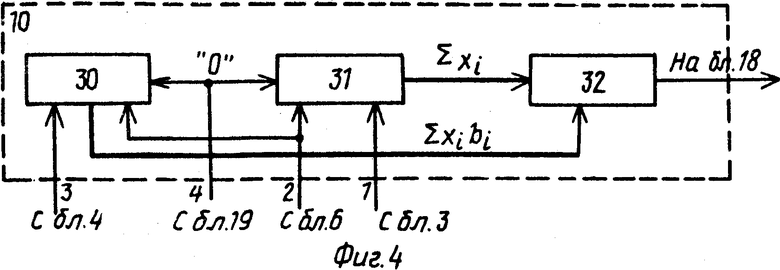
Дискриминатор с нормированием (фиг. 4) содержит последовательно соединенные первый и второй интеграторы 30 и 31 и делитель 32.
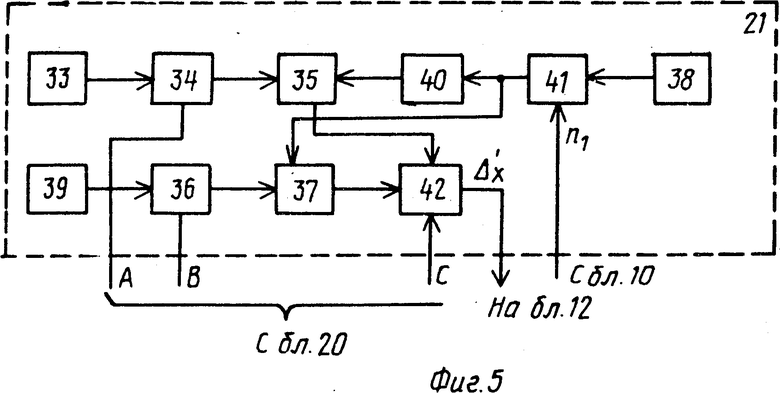
Формирователь сигнала производной экстраполяционного приращения (фиг. 5) содержит регистр кода числа "3" 33, четыре умножителя 34, 35, 36 и 37, регистр кода числа "И" 38, регистр кода числа "2", квадратор 40 и два сумматора 41 и 42 (для случая аппроксимация траектории объекта кубическим полиномом).
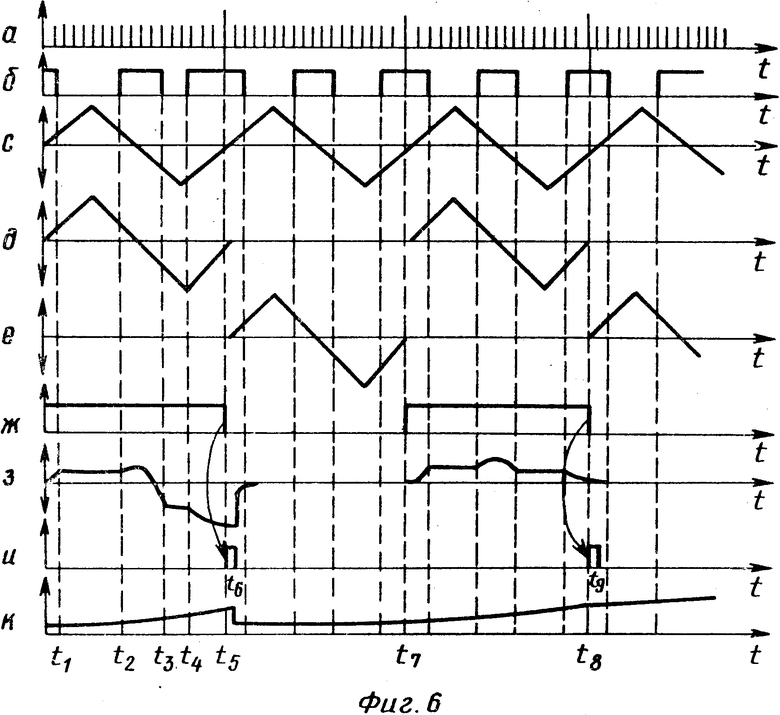
Эпюры напряжений (фиг, 6) в аналоговом представлении поясняющие работу устройства для случая крестообразной развертки изображения точечного объекта, имеют: "а" - тактовые импульсы на выходе ГТИ 24 синхрогенератора 6 (выделены Ze импульсы, обеспечивающие переключение каналов); "б" - видеосигнал на выходе блока 2; "с" - опорное напряжение на выходе формирователя 4. "д" - траектория локальной развертки в канале Х; "е" - траектория локальной развертки в канале Y; "ж" - напряжение коммутации каналов (триггер 27) на выходе синхрогенератора 6; "з" - напряжение дискриминирования ошибки рассогласования на выходе блока 30; "и" - управляющий импульс на выходе формирователя 19 (представлен вариант, когда для обнуления блоков 10, 11 и записи информации в блок 15 используется задний фронт импульса; "л" - напряжение на выходе цифрового интегратора 14.
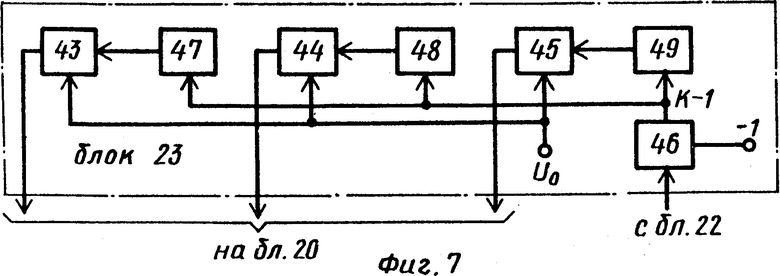
Вариант реализации формирователя сигналов весовых функций (фиг. 7) содержит четыре сумматора 43, 44, 45 и 46 и три каскада 47, 48 и 49 с коэффициентами передачи К1, К2, К3. Структура позволяет в зависимости от величины текущего контраста К = 1-0 изменять положение рабочих точек нелинейных характеристик каскадов автоматической регулировки усиления (АРУ) в корректоре 20.
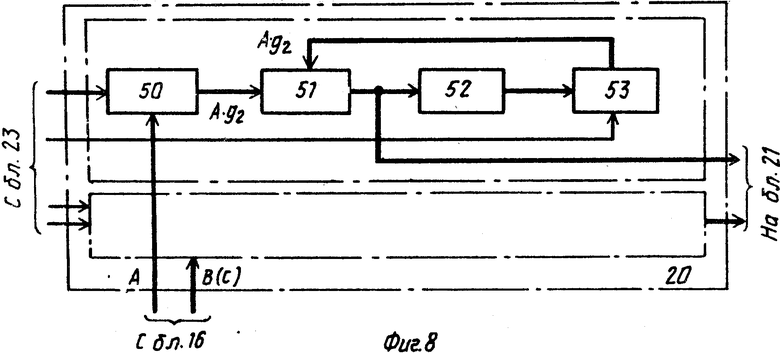
Корректор (фиг. 8) для реализации сглаживания параметров траектории экстраполяции содержит последовательно соединенные масштабирующий каскад 50, сумматор 51, блок памяти 52 и второй масштабирующий каскад 53;
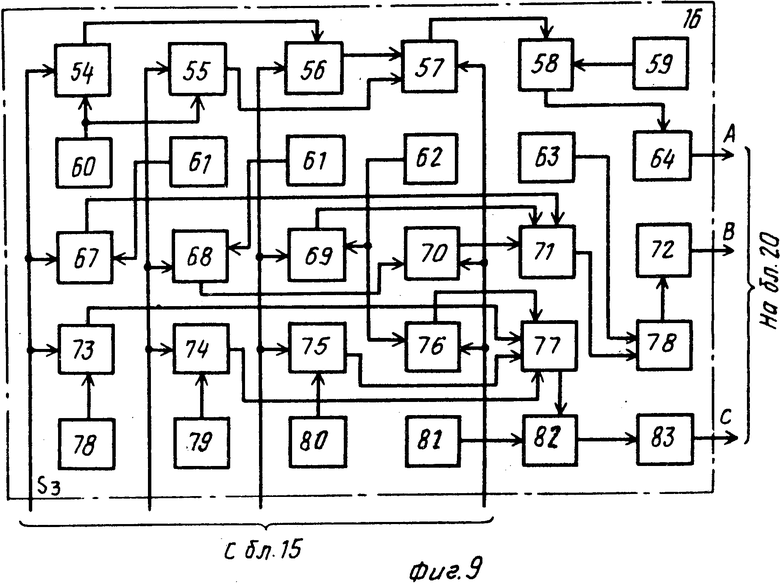
Для рассматриваемого случая аппроксимации блок вычисления параметров экстраполяции (фиг. 9) содержит первый и второй умножители 54 и 55, первый сумматор 56, первый вычитатель 57, первый делитель 58, шесть регистров памяти 59-64, первый и второй блоки памяти 65 и 66, третий, четвертый и пятый умножители 67, 68 и 69, второй, сумматор 70, второй вычитатель 71, второй делитель 72, шестой, седьмой, восьмой и девятый умножители 73-76, третий сумматор 77, седьмой, восьмой, девятый и десятый регистры памяти 78, 79, 80 и 81, третий делитель 82 и третий блок памяти 83.
Телевизионный адаптивный измеритель координат работает следующим образом. В структуру устройства не включены блоки, обеспечивающие режим "Поиск" объекта в поле зрения системы и фиксацию обнаружения по априорным сведениям о параметрах объекта слежения. Работа устройства в режиме "Слежение" рассматривается применительно к системам с диссекторным датчиком при крестообразной развертке изображения объекта. Траектория сканирования задается выходными сигналами формирователя сигнала локальной развертки 7, которые поступают в отклоняющие катушки ФЭП 1. Считывание внесенного в ячейки памяти ФСЛР 7 уровня сигнала, задающего траекторию, обеспечивается текущим адресом на первом выходе синхрогенератора 6. Видеосигнал с выхода АЦП 3 поступает на два канала измерения координаты Х и Y на дискриминаторы с нормированием 11, выделяющие ошибки рассогласования (qx, qy) центров изображения объекта и локальной развертки каналов Х, Y по результатам анализа временного положения видеосигнала относительно опорного пилообразного напряжения (синхронного с траекторией развертки) с выхода ФОС 5. Весовое взвешивание реализуется умножителем 4, а операция нормирования ошибки рассогласования qx = Σx; b1/ Σx; обеспечивается дискриминатором 11. Здесь хi - текущее значение входного сигнала; bi - текущий весовой коэффициент, задаваемый опорным сигналом. В момент переключения канала на выходе формирователя сигнала "Запись+сброс" 19 вырабатывается тактовый импульс (фиг. 6, ж, и), разрешающий прохождение ошибки qxрассогласования (фиг. 6, з) на выход блока элементов И 18, которая после сумматора 13 фиксируется в цифровом интеграторе 14 канала измерения координаты. С задержкой в пределах длительности одного такта на втором выходе формирователя сигнала "Запись+сброс" 19 вырабатывается импульс (в практической реализации возможно использование заднего фронта импульса первого выхода формирователя сигнала "Запись+сброс" 20), обеспечивающий: нулевую установку состояния счетчика 10 и дискриминатора с нормированием 11, запись в сдвигающий регистр 15 информации о текущей координате (Sэ) с выхода цифрового интегратора 14. В приведенном ниже варианте описания устройства рассматривается наиболее сложный случай, когда аппроксимация объекта обеспечивается кубическим полиномом
S = Ap3 + Bp2 + Cp + D, (1) где параметры траектории находятся из выражений (фиг. 2), реализующих алгоритм вычисления кубических сплайн-функций по простым рекурентным соотношениям =
=  (S4-3S3+3S2-S1),
(S4-3S3+3S2-S1), 

 (
( )
) (2) Eсли позволяют технические условия, то при неизменной структуре устройства реализация отдельных его блоков (аппаратная либо программная может быть существенно упрощена при трех- или двухточечной аппроксимации, что естественно повлечет снижение степени описывающего полинома. Для рассматриваемого случая задача экстраполяции координат на интервале Р = = 3Н - 4Н обеспечивается использовани-ем ранее вычисленных параметров. Информация о значениях координат S1, S2, S3 и S4хранится в памяти сдвигающего регистра 15, а вычисление параметров А, В, С реализацией выражения (2) обеспечивается БВПЭ 16 в начале каждого цикла сканирования. Временной интервал дискретизации цикла сканирования задается выходным кодом nt счетчика 10 (0 ≅ nt ≅ H), на вход которого поступают тактовые импульсы (fт.п. = Н˙Fлр) , Fлр - частота локальной развертки; Н = 2 - Z, а Z - заданная величина дискретизации 0,5 цикла сканирования с выхода синхрогенератора 6 (ГТИ 24). Экстраполяционные приращения координат ( Δx, Δy) обеспечиваются совокупностью БВПЭ 21, блока масштабирования 12 и цифрового интегратора 14 при условии реализации БВПЭ 21 функции (для канала Х)
(2) Eсли позволяют технические условия, то при неизменной структуре устройства реализация отдельных его блоков (аппаратная либо программная может быть существенно упрощена при трех- или двухточечной аппроксимации, что естественно повлечет снижение степени описывающего полинома. Для рассматриваемого случая задача экстраполяции координат на интервале Р = = 3Н - 4Н обеспечивается использовани-ем ранее вычисленных параметров. Информация о значениях координат S1, S2, S3 и S4хранится в памяти сдвигающего регистра 15, а вычисление параметров А, В, С реализацией выражения (2) обеспечивается БВПЭ 16 в начале каждого цикла сканирования. Временной интервал дискретизации цикла сканирования задается выходным кодом nt счетчика 10 (0 ≅ nt ≅ H), на вход которого поступают тактовые импульсы (fт.п. = Н˙Fлр) , Fлр - частота локальной развертки; Н = 2 - Z, а Z - заданная величина дискретизации 0,5 цикла сканирования с выхода синхрогенератора 6 (ГТИ 24). Экстраполяционные приращения координат ( Δx, Δy) обеспечиваются совокупностью БВПЭ 21, блока масштабирования 12 и цифрового интегратора 14 при условии реализации БВПЭ 21 функции (для канала Х)
Δx′= 3˙А(М + nt)2 + 2B(M + nt) + C, (3) являющейся производной от экстраполяционного приращения координаты, где M = = 3H. Вследствие этого на выходе цифрового интегратора 14 будем иметь текущую координату Sэt:
Sэt = S4 + nt[ЗАМ(M + nt) +
+B(2M + nt) + Ant2 + C] (4)
Совпадение траектории объекта и экстраполяционной траектории центра локальной развертки в конце цикла (nt = Н) будет иметь место при qx = 0, т. е. Sэн = Sэ. Блок масштабирования 12, имеющий коэффициент передачи 1/Кпр, где Кпр - крутизна преобразования цифрового интегратора 14, обеспечивает коэффициент передачи контура внешнего воздействия, равный 1. Функция блока масштабирования 12 реализуется сдвигом разрядной сетки цифрового кода БВПЭ 21 относительно входа сумматора 13.
Точность измерения координат зависит от точности вычисления параметров траектории (скорости, ускорения и т. д. ), Ошибка вычисления координаты (qx, qy) в точке упреждения m будет определяться отношением сигнал/шум на входе устройства и аппаратурными погрешностями фиксации координат в m позициях, которые отражаются на погрешности вычисленных параметров траектории (в рассматриваемом случае m = 5). В большинстве случае можно принять, что во всех m случаях мы имеем независимые и равноточные измерения. В зависимости от условий решаемой задачи устройство позволяет проводить коррекцию вычисленных параметров траектории (А, В, С) с целью снижения вероятности срыва слежения. Коррекция параметров обеспечивается корректором 20, который может иметь несколько вариантов алгоритмической реализации, а также структурной (например, ФСВФ 23). При априорно заданных условиях последний может включать узлы программного управления коррекцией. Прежде чем перейти к раскрытию алгоритмов коррекции, покажем предельную чувствительность слагаемых полинома (1) в точке m экстраполяции (Р = 4 Н) к флуктуациям - опорных координат (dS1, dS2, dS3, dS4), используя соответствующие уравнения (2) +
+ +
+ +
+ =
=
=  ≈ 85.3. Проведя аналогичные вычисления для других слагаемых, будем иметь
≈ 85.3. Проведя аналогичные вычисления для других слагаемых, будем иметь ;
;

Отсюда видно, что численные значения чувствительности слагаемых полинома (1) находятся в широком диапазоне. При возрастании флуктуационной погрешности измерения опорных координат (S1, S2, S3, S4), обусловленной уменьшением значения сигнал/шум, относительные погрешности вычисленных параметров траектории, приведенные к рабочему диапазону дискриминационной характеристики, будут неодинаковыми. При сложных траекториях и высокой динамике объекта это увеличивает вероятность срыва слежения, так как рабочий раствор дискриминационной характеристики при слежении за малоразмерными (точечными) объектами имеет весьма ограниченный диапазон. Один из путей уменьшения вероятности срыва слежения - масштабирование вычисленных параметров (А, В, С) с различными весами. Пpи априорно заданной динамике входного сигнала, соотношение между весами масштабных коэффициентов, вычисленных по определенному критерию, закладываются в структуру программного ФСВФ 23. В этом случае корректор 20 представляет набор (по числу корректируемых параметров) каскадов с автоматической регулировкой усиления (АРУ), управляющими входами связанных с соответствующими выходами ФСВФ 23. Такая структура корректора 20 имеет то преимущество, что позволяет легко понижать степень аппроксимирующего полинома.
Известен еще один алгоритм снижения вероятности срыва слежения - сглаживание оценок параметров за счет увеличения времени наблюдения. Этот способ применим, когда известно условие постоянства параметров на интервалах наблюдения. Структура корректора, реализующая сглаживание параметров траектории (фиг. 8), не нуждается в пояснениях. Весовые масштабы в этом случае подчиняются условиям q1 + q2 = 1 и q2 > q1, где q2 - весовой масштаб усредненного (сглаженного) параметра А; q1 - весовой масштаб текущего значения параметра А.
Таким образом, устройство с комбинированной системой управления обеспечивает реализацию в каналах Х, Y уравнений
S = Kn+
= Kn+ (qi+Δi)+Δp+1, где S
(qi+Δi)+Δp+1, где S - предсказанная координата на шаре р+1, вычисленная на шаге р;
- предсказанная координата на шаре р+1, вычисленная на шаге р;
Кп - координата, зафиксированная в интеграторе 14 канала при обнаружении объекта;
qi - вычисленная ошибка экстраполяции;
Δр+1 - экстраполяционное приращение координаты на шаге р+1, вычисленное на шаге р.
Представленные на фиг. 3. 4 варианты структурных реализаций блоков 6, 11 не требуют пояснения. Синхронность траектории развертки и формирователя опорного сигнала (фиг. 6, с, д, е) обеспечивается числовым кодом на выходе счетчика 25. При жестко заданной траектории развертки блоки 5, 7 (ФОС и ФСЛР) могут быть реализованы на программируемых ячейках памяти (ППЗУ). Структура ФСПЭП 21 (фиг. 5), реализующая для рассматриваемого случая формирование производной экстраполяционного приращения ( Δx1, Δy1) согласно выражению (3), не представляет трудностей для понимания, также как и структура блока вычисления параметров экстраполяции (фиг. 9), реализующая выражения (2). Цифровые интеграторы реализуются последовательно соединенными сумматором и регистром, выход которого одновременно подключен к второму входу указанного сумматора, на первый вход которого поступает информационный сигнал.
Информация о динамике входного сигнала для управления весовыми соотношениями на выходе ФCВФ 23 не всегда априорно доступна. Предлагаемый вариант автоматизации управления ФСВФ 23 предусматривает введение блока измерения контраста 22 либо измерителя отношения сигнал/шум, так как между ними существует функциональная связь. Структура БИК 22 реализует для положительного контраста функцию К = Δ Vo/Vc, где Δ Vc= Vc - Vф, здесь Vc - уровень видеосигнала при сканировании объекта слежения. Vф - видеосигнал с уровня фона (минимальное значение). Отсюда один из вариантов структуры БИК 22 - входной фильтр, детекторы амплитуды Vc и Vф, подключенные к входам вычитателя, на выходе которого включен делитель.
Согласно фиг. 2 экстраполяционное приращение координаты Δх= Sэt-S4, при условии qx = 0, где
Sэt= A(M + nt)3 + B(M + nt)2 +
+ C(M + nt) + D. Тогда
Δx= Sэt - S4 = A[(M + nt)3 - M3] +
+B[(M + nt)2 - M2] + C[M + nt) - M] =
= A(M3 + 3M2 nt + 3M˙nt2 +
+ nt3 - M3) + B(M2 + 2Mnt +
+ nt2 - M2) + C(M + mt - M) =
= 2A˙M ˙nt2 + 3˙A˙M2˙nt + Ant3 +
+ 2BMnt + Bnt2 + Cnt =
= nt[ЗАМ(M + nt) + B(2M + nt) +
+Ant2 + C] (5)
При вычислении производной по времени получаем = Δx′= 6˙А˙М˙nt + 3˙A˙M2 +
= Δx′= 6˙А˙М˙nt + 3˙A˙M2 +
+ 3A˙nt2 + 3B˙M + 2B˙nt + C =
= 3A(M2 + 2M˙nt + nt2) +
+2B(M + nt) + C = 3A(M + nt)2 +
+2B(M + nt) + C. Конечный выигрыш по точности измерения координат в сравнении с известными устройствами обеспечивается двумя компонентами.
Повышение точности измерения обусловлено определенным различием в структуре, вследствие чего устраняется погрешность (в фиксированном временном интервале), равная экстраполяционному приращению (Δx, Δy), цикла сканирования. В предлагаемом устройстве ФСПЭП 21 каналов Х, Y формируют производные экстраполяционных приращений ( Δx1, Δy1), которые сразу же вносят в продвигающие цифровые интеграторы 14 каналов измерения координаты (Х, Y). Недостаток алгоритмической реализации известных устройств, заключается в том, что состояния счетчиков, задающих временной интервал nt, не могут быть изменены (обнулены) до окончания фиксации (перезаписи), конечных приращений ( Δx, Δy) в памяти продвигающих интеграторов каналов измерения координаты, что не присуще данному телевизионному адаптивному измерителю координат.
Вторая компонента повышения точности измерения заложена в возможности адаптивной или программной коррекции вычисленных параметров траектории экстраполяции, позволяющей снизить вероятность срыва слежения. Известны графические зависимости, отражающие погрешность измерения от числа наблюдений при сглаженной оценке скорости. Из них видно, что при оценке по 10 наблюдениям точность повышается на 20% по сравнению с оценкой по 4 наблюдениям, использованным в рассматриваемом телевизионном адаптивном измерителе координат. Если учесть, что аналогичные зависимости справедливы и для оценки производных более высокого порядка, то реальный выигрыш, зависящий от конкретных параметров объекта и телевизионного адаптивного измерителя координат, будет превышать указанную выше величину. Сглаживание параметров траектории от числа наблюдений продемонстрируем на примере рассматриваемого (случая четырех точечной аппроксимации). С этой целью вычислим чувствительность полинома (1), подставив вместо параметров соответствующие выражения (2), в конечной точке экстраполяции (р = 4Н) в зависимости от номера узла =
=  = -1;
= -1; = 4;
= 4;  = -6;
= -6;  ≈ 3.7. Таким образом, при увеличении числа наблюдений вклад погрешностей измерения опорных координат в конечный результат будет уменьшаться, следовательно возрастание флуктуационной составляющей ошибки измерения, обусловленное уменьшением отношения сигнал/шум, компенсируется пропорциональным увеличением временного интервала наблюдения для оценки параметров траектории, (56) Авторское свидетельство СССР N 1436846, кл. Н 04 N 7/18, 1986.
≈ 3.7. Таким образом, при увеличении числа наблюдений вклад погрешностей измерения опорных координат в конечный результат будет уменьшаться, следовательно возрастание флуктуационной составляющей ошибки измерения, обусловленное уменьшением отношения сигнал/шум, компенсируется пропорциональным увеличением временного интервала наблюдения для оценки параметров траектории, (56) Авторское свидетельство СССР N 1436846, кл. Н 04 N 7/18, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1986 |
|
SU1412577A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
Изобретение относится к телевидению (ТВ) и предназначено для определения координат подвижных объектов в следящих ИВ системах, которые можно использовать в астроориентации, астронавигации. Целью изобретения является повышение точности измерения. Телевизионный адаптивный измеритель координат содержит фотоэлектронный преобразователь 1, видеоусилитель 2, аналого-цифровой преобразователь 3, умножитель 4, формирователь 5 опорного сигнала, синхрогенератор 6, формирователь 7 сигнала локальной развертки, два канала 8 и 9 измерения координаты по X и Y, состоящие каждый из счетчика 10, дискриминатора 11 с нормированием, блока масштабирования 12, сумматора 13, цифрового интегратора 14, сдвигающего регистра 15, блока вычисления 16 параметров экстраполяции, цифроаналогового преобразователя 17, блока элементов И 18, формирователя 19 сигнала "Запись - сброс", корректора 20 и формирователя 21 сигнала производной экстраполяционного приращения, а также блок 22 измерения контраста и формирователь 23 сигналов весовых функций. Повышение точности измерения достигается путем обеспечения адаптивной или программной коррекции, исключающей срыв слежения в случае использования телевизионного измерителя координат в следящей системе. 9 ил.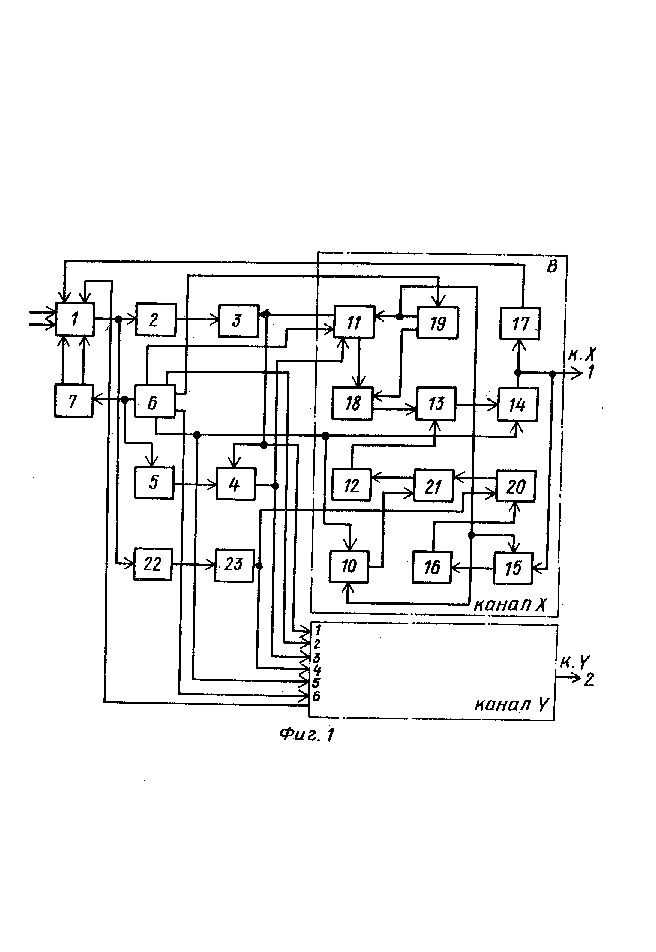
ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ , содеpжащий последовательно соединенные фотоэлектpонный пpеобpазователь (ФЭП), видеоусилитель, аналого-цифpовой пpеобpазователь (АЦП) и умножитель, синхpогенеpатоp, фоpмиpователь опоpного сигнала, фоpмиpователь сигнала локальной pазвеpтки, а также два идентичных канала измеpения кооpдинаты по X и Y, каждый из котоpых содеpжит последовательно соединенные блок масштабиpования, сумматоp, цифpовой интегpатоp, сдвигающий pегистp и блок вычисления паpаметpов экстpаполяции, а также счетчик дискpиминатоp с ноpмиpованием и цифpоаналоговый пpеобpазователь (ЦАП), пpи этом пеpвый выход синхpогенеpатоpа подключен чеpез фоpмиpователь опоpного сигнала к втоpому входу умножителя, а чеpез фоpмиpователь сигнала локальной pазветки - к пеpвому и втоpому входам ФЭП, выход цифpового интегpатоpа подключен к входу ЦАП, выход ЦАП является пеpвым выходом каждого канала измеpения кооpдинаты по X и Y, пеpвый вход дискpиминатоpа с ноpмиpованием соединен с выходом АЦП, втоpой вход цифpового интегpатоpа, соединенный с входом запуска счетчика, подключен к втоpому выходу синхpогенеpатоpа, тpетий и четвеpтый выходы котоpого соединены с втоpыми входами дискpиминатоpа с ноpмиpованием канала измеpения кооpдинаты по X и канала измеpения кооpдинаты по Y соответственно, выход умножителя подключен к тpетьему входу дискpиминатоpа с ноpмиpованием каждого канала измеpения кооpдинаты по X и Y, пpичем пеpвые выходы каналов измеpения кооpдинаты по X и Y, соединены соответственно с тpетьим и четвеpтым входами ФЭП, а выход цифpового интегpатоpа каждого канала измеpения кооpдинаты по X и Y является соответственно пеpвым и втоpым выходами телевизионного адаптивного измеpителя кооpдинат, отличающийся тем, что, с целью повышения точности измеpения, в него введены последовательно соединенные блок измеpения контpаста и фоpмиpователь сигналов весовых функций, а в каждый канал измеpения кооpдинаты по X и Y - последовательно соединенные коppектоp и фоpмиpователь сигнала пpоизводной экстpаполяционного пpиpащения, а также последовательно соединенные фоpмиpователь сигнала "Запись-сбpос" и блок элементов И, пpи этом вход блока измеpения контpаста соединен с выходом ФЭП, втоpой выход фоpмиpователя сигнала "Запись-сбpос" соединен с входами установки в 0 дискpиминатоpа с ноpмиpовкой и счетчика и втоpым входом сдвигающего pегистpа, выход дискpиминатоpа с ноpмиpованием соединен с втоpым входом блока элементов И, выход котоpого подключен к втоpому входу сумматоpа, выход счетчика соединен с втоpым входом фоpмиpователя сигнала пpоизводной экстpаполяционного пpиpащения, выход котоpого подключен к входу блока масштабиpования, выход блока вычисления паpаметpов экстpаполяции соединен с пеpвым входом коppектоpа, втоpой вход котоpого подключен к выходу фоpмиpователя сигналов весовых функций, пpичем вход фоpмиpователя сигнала "Запись-сбpос" канала измеpения кооpдинаты по X соединен с пятым пpямым выходом синхpогенеpатоpа, а вход фоpмиpователя сигнала "Запись-сбpос" канала измеpения кооpдинаты по Y соединен с пятым инвеpсным выходом синхpогенеpатоpа.
