,1
Изобретение относится к приводиым механизмам и предназначено для использования о высокоточных следящих и измериггельных системах в качестве исполнительного звема для обработки угловых перемещений.
Известен рычажно-вннтовой привод, содержащий двигатель, винт, гайку, перемещающуюся в осевом направлении, и рычаг, соединенный с гайкой посредством упругого элемента.
Предлагаемый привод отличается от иввестнюго тем, что упругий элемент выполнен в виде плоской пластины, жестко закрепленной на гайке и на рычаге так, что изгиб пластины происходит по ловерхнюсти, образующая которой параллельна оси поворота рычага, а расстояние между осями вращения рычага и винта равно радиусу рычага.
Такое выполнение привода позволяет повысить его кинематическую точность.
Па чертеже изображен предлагаемый привод.
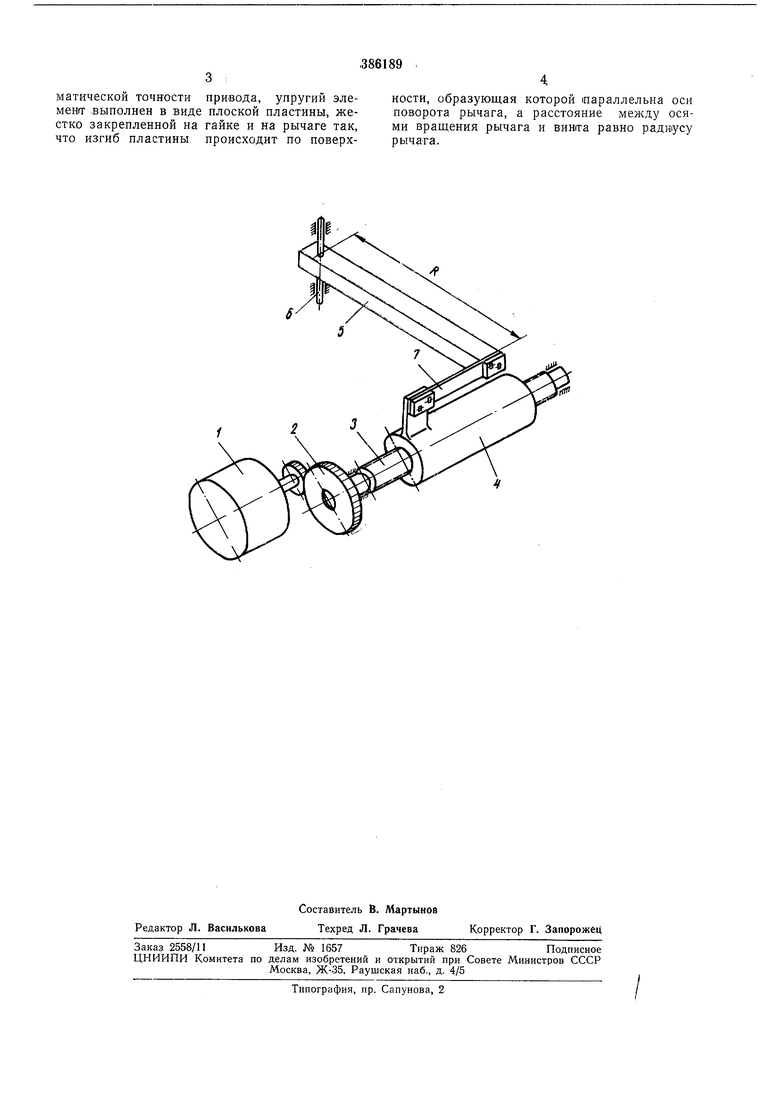
Рычажно-винтовой привод содержит двигатель 1, редуктор 2, винт 3, гайку 4, перемещающуюся в осевом направлении, и рычаг 5, установленный на оси 6 и соединенный с гайкой 4 посредством упругого элемента, выполненного в виде ллоской пластины 7, жестко закрепленной на гайке 4 и на рычаге 5 так, что и.згиб пластины 7 происходит по
поверхности, образующая которой параллельна оси поворота рычага, а расстояние между осями вращения рычага 5 и винта 3 равно радиусу рычага 5.
Предлагаемый привод работает следующим образом.
Вращение от двигателя / передается через редуктор 2 на винт 3, который перемещает гайку 4. Пластина 7, закрепленная на рычаге 5 и гайке 4, преобразует линейное перемещение гайки 4 в угловой разворот рычага 5 вокруг оси 6.
При прямолинейном перемещении гайки 4 и движении ковца рычага по дуге окружности радиуса R происходит изменение расстояния между концом рычага 5 и осью гайки 4, компенсировать которое позволяет упругий изгиб пластины 7. При этом ивгиб пластины происход1 т по
поверхности, образующая которой параллельна оси поворота рычага 5, а расстояние между осями вращения рычага 5 и винта 3 равно радиусу рычага.
Предмет изобретения
Рычажно-винтовой привод, содержащий
двигатель, винт, гайку, перемещающуюся в
осевом направлении, и рычаг, соединенный с
гайкой посредством упрзгого элемента, отличающийся тем, что, с иелью повьш1ен11Я кинемагической точности привода, упругий элеменгг выполнен в виде плоской пластины, жестко закрепленной на гайке и на рычаге так, что изгиб пластины происходит по поверхности, образующая которой параллельна оси поворота рычага, а расстояние между осями вращения рычага и винта равно радиусу рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм компенсации продольных смещений ведущего моста | 2017 |
|
RU2674966C1 |
| Механизм тонкой подачи шлифовального круга | 1988 |
|
SU1567362A1 |
| Устройство для перемещения по дуге при стереофотосъемке | 1988 |
|
SU1597851A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ГАЗО-, НЕФТЕ- И ПРОДУКТОПРОВОДОВ, КУЛИСНО-ВИНТОВОЙ ПОВОРОТНЫЙ МЕХАНИЗМ, ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, ПНЕВМОКЛАПАН | 2007 |
|
RU2348837C2 |
| Центробежная установка для испытания образцов | 1986 |
|
SU1388758A1 |
| Устройство для снижения динамической нагруженности трансмиссии мобильных агрегатов | 2017 |
|
RU2651387C1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ ДЛИННОМЕРНЫХ МАТЕРИАЛОВ НА ОПРАВКУ | 2000 |
|
RU2173664C1 |
| Стенд для воспроизведения непериодических интенсивно изменяющихся ускорений | 1990 |
|
SU1739303A1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |