1
Изобретение относится к системам автоматического контроля и регулирования.
Известны датчики угловых перемещений, содержащие Ш-образный магнитопровод статора, на котором расположены входная и выходная обмотки и ротор.
Недостатком известных конструкций является малая зона линейности выходной характеристики.
Описываемое устройство отличается тем, что в нем ротор выполнен в виде цилиндрического сегмента с трапецеидальным основанием.
Это позволило увеличить диапазон работы датчика за счет расширения зоны линейности выходной характеристики без существенного изменения общих габаритов.
На чертеже схематически изображено описываемое устройство.
Оно содержит статор / и ротор 2.
Статор выполнен из Ш-образного магнитонровода 3, на прямоугольных стержнях которого расположены обмотка возбуждения 4 и выходная обмотка 5, представляющая собой. две встречно включенные катушки крайних стержней.
Ротор выполнен без обмотки и представляет собой симметричное относительно нейтральной оси О-О тело, имеющее трапецеидальные сечения в плоскостях, перпендикулярных оси О-о.
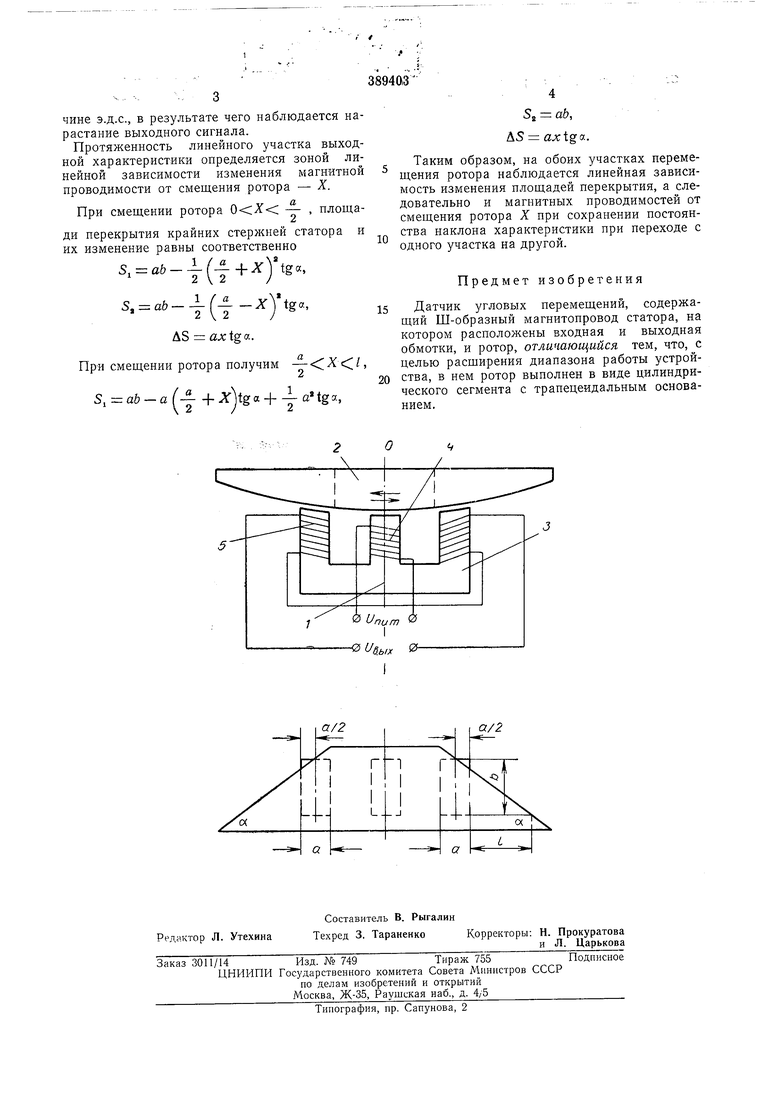
Выбор острого утла а трапецеидального сечения ротора определяется требуемой протяженностью линейного участка выходной характеристики, размеры верхнего и нижнего оснований трапеции выбраны таким образом, чтобы в симметричном относительно оси О-О положении ротора щирина а крайних стержней магпитопровода 3 делилась боковыми сторонами трапецеидального сечения ротора пополам. Высоту трапеции рекомендуется выбирать несколько больше поперечных размеров в магнитопровода 3, что обеспечивает лучшее использование магнитного потока.
Датчик угла работает следующим образом. При подаче напряжения на обмотку возбуждения возникает магнитный поток, наводящий э.д.с. в катушках выходной обмотки.
При симметричном относительно оси О-О положении ротора в катушках крайних стержней обмотки 5 наводятся равные по величине э.д.с., фазы которых противоположны за счет встречного включения катушек. В результате появляется минимальный выходной сигнал.
При смещепии ротора от симметричного относительно оси О-О положения равенство магнитных проводимостей под крайними стержнями магнитопровода 3 нарушается, магнитный поток перераспределяется и наводит в катушках обмотки 5 разные цп -чине э.Д-с., в результате чего наблюдается нарастание выходного сигнала.
Протяженность линейного участка выходной характернстики определяется зоной линейной зависимости изменения магнитной нроводимости от смещения ротора - X.
При смещении ротора -
площа- и
ди перекрытия крайних стержней статора их изменение равны соответственно
5,ab-i(.
S, ab--L(-Xjtgo.,
AS ах tg а. ПрИ смещении ротора получим ,
t-i
S,ab-a(- + , 2/2
Ss аЬ, AS axigy..
Таким образом, на обоих участках перемещения ротора наблюдается линейная зависимость изменения площадей перекрытия, а следовательно и магнитных проводимостей от смещения ротора X при сохранении постоянства наклона характеристики при переходе с одного участка на другой.
Предмет изобретения
Датчик угловых перемещений, содержащий Ш-образный магнитопровод статора, на котором расположены входная и выходная обмотки, и ротор, отличающийся тем, что, с целью расщирения диапазона работы устройства, в нем ротор выполнен в виде цилиндрического сегмента с трапецеидальным осиованием.
0 пат 0 I
52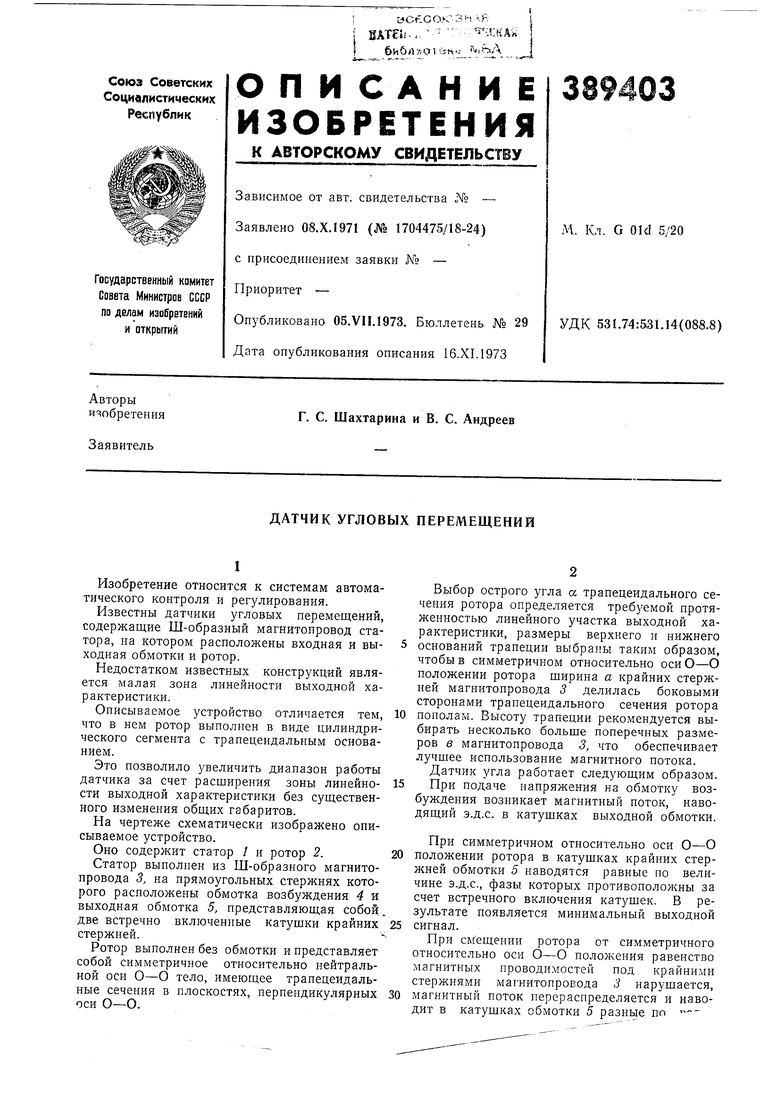
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых перемещений | 1984 |
|
SU1234725A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2098908C1 |
| ТРАНСФОРМАТОРНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИКУГЛА | 1970 |
|
SU288598A1 |
| УНИПОЛЯРНАЯ Л\АШИНА ПЕРЕМЕННОГО ТОКА | 1970 |
|
SU273327A1 |
| Преобразователь линейных перемещений валв в электрический сигнал | 1973 |
|
SU486341A1 |
| Бесконтактный преобразователь угла поворота | 1989 |
|
SU1690109A1 |
| Датчик для синхронного электродвигателя с частотно-токовым управлением | 1976 |
|
SU686124A1 |
| Бесконтактный преобразователь угла поворота | 1991 |
|
SU1814160A1 |
| Трансформаторный преобразователь линейных перемещений в электрическое напряжение | 1959 |
|
SU127923A1 |
| ТИОТЕКА iБ. Л. Алиевский | 1971 |
|
SU304664A1 |
