1
Изобретение относится к коксохимическому машиностроению, в частности к устройствам автоматики, применяемым для унравления движения коксовых машин.
Известны устройства для определения местоположения подвижных объектов, содержащие расположенные вдоль нути следования метки пути, два датчика, располол енные на подвижном объекте один впереди другого на расстоянии, равном расстоянию между метками пути, реле памяти и направления, счетчик, подключенные к нему блок сигнализации и управления и логический блок, в котором нормально открытые контакты первого и второго датчиков включены последовательно.
Целью предлагаемого устройства является повышения точности определения местоположения подвижных объектов.
Это достигается тем, что параллельно нормально открытому контакту первого датчика но ходу движения включена цепь последовательно соединенных нормально закрытого контакта первого реле памяти и нормально открытого контакта второго реле памяти, а параллельно пормально открытому контакту второго датчика по ходу движения объекта подключена цень последовательно соединенных нормально открытых контактов первого и второго реле памяти.
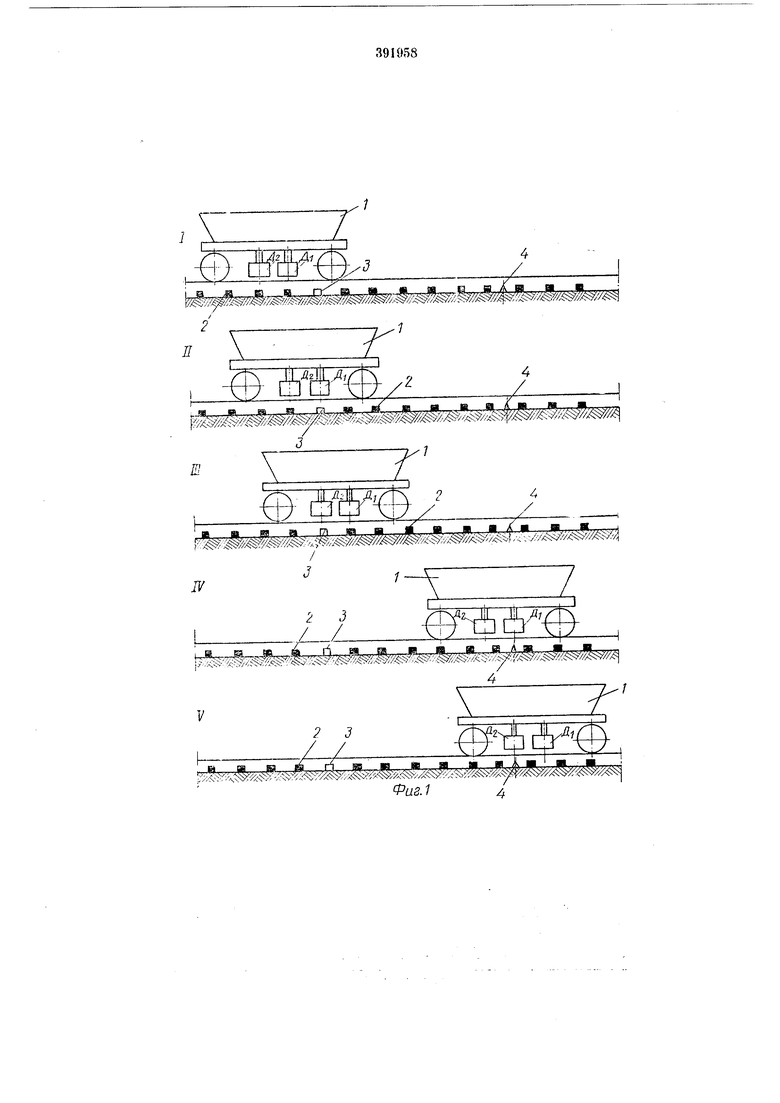
На фиг. 1 изображены возможные положе2
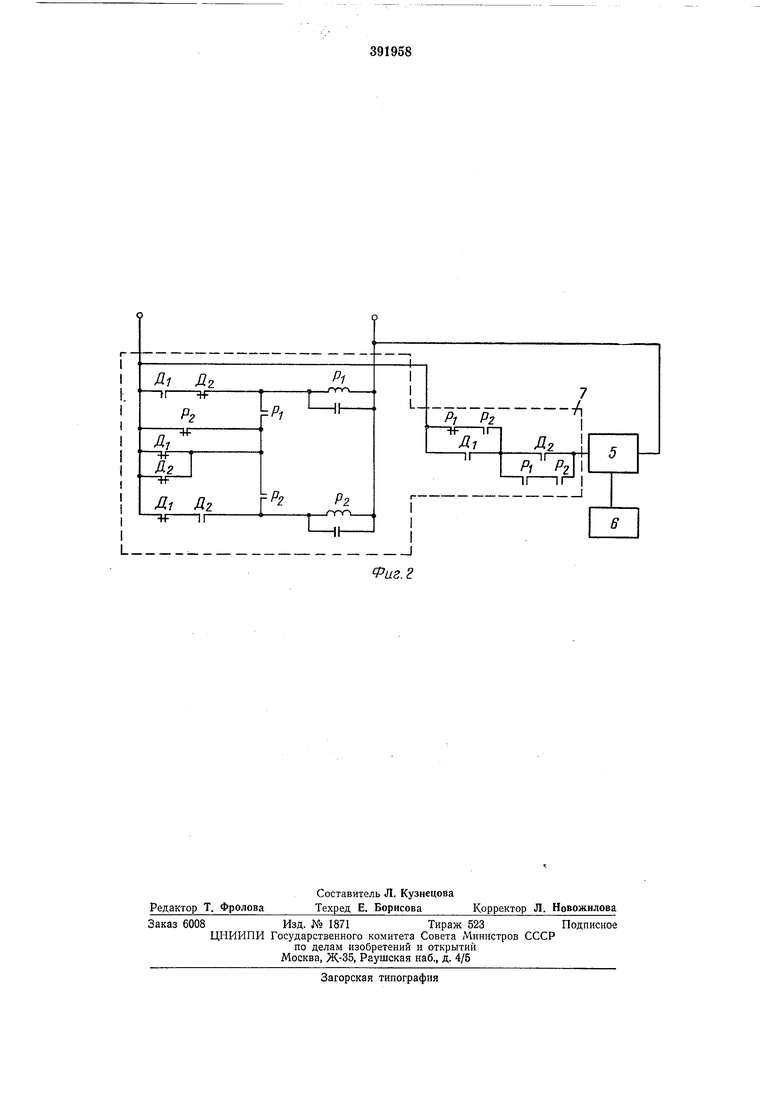
ния датчиков подвижного объекта относительно меток пути; на фиг. 2 представлена принципиальная схема подключения контактов датчиков к счетчику.
Иа подвилсном объекте / расположены два датчика Д и Дг так, что нри подвижного объекта один датчик Д, по ходу движения находится впереди другого датчика Д2 на расстоянии, равном расстоянию между мегками 2 пути.
Во время передвижения подвижного объекта 1 возможны следующие положения датчиков Д и Д2 относительно меток 2.
Иоложение I - датчики Д и Дз находятся
одновременно над метками 2; положение II - датчик Д находится над отсутствующей меткой 3, а датчик Д находится над меткой 2; положение III - датчик Д находится над меткой 2, а датчик Д над отсутствующей меткой
3; положение IV - датчик Да находится над ложной меткой 4, а под датчиком Д2 нет меток; положение V - датчик Да находится над ложной меткой 4, а нод датчиком Д нет меток.
К счетчику 5 подключены блок 6 сигнализации и управления и логический блок 7, в котором нормально открытый контакт датчика Ml и нормально закрытый контакт датчика Д: включены последовательно в цепь первого реле PI памяти, запоминающего включение только первого по ходу движения датчика Дь а нормально закрытый контакт датчик Д и норMavTbHO открытый контакт датчика Д2 включены последовательно в цепь второго реле PZ цамяти, запоминающего включение только второго по ходу движения датчика Причем нормально открытые контакты датчиков Д и Д2 подключены последовательно к счетчику, параллельно нормально открытому контакту датчика Д, включена цепь последовательно соединенных нормально закрытого контакта первого реле Р памяти и нормально открытого коптакта PZ памяти, а параллельно нормально открытому контакту датчика Д2 включена цепь последовательпо соединенных нормально открытых контактов первого Р и второго PZ реле памяти.
Устройство работает следующим образом.
При движении подвижного объекта 1, когда оба датчика Д, и Д2 находятся над метками 2 пути, замыкаются нормально открытые контакты датчиков Д1 и Д2, а нормально закрытые размыкаются. Отсчет меток 2 пути осуществляется путем включения счетчика 5 по цепи нормально открытых контактов датчиков Д и Д2.
В случае нахождения подвижного объекта / в положении П включается второе реле PZ памяти и отсчет меток 2 пути осуществляется путем включения счетчика 5 по цепи нормально замкнутого контакта первого реле Р памяти, нормально открытых контактов второго реле памяти и датчика Д2. Подвижный объект / продолжает двигаться в положение П1, при котором включается первое реле PI памяти и отсчет меток 2 пути осуществляется путем включения счетчика 5 по цепи нормально открытых контактов датчика Д, первого PI и второго PZ реле памяти.
В случае, когда оба датчика Д и Да находятся над метками пути, обесточиваются первое PI и второе PZ реле памяти посредством
нормально закрытых контактов датчиков Д и
Д2.
При появлении ложной метки 4 пути наступает положение IV, при котором включается первое реле Pj памяти, но отсчет меток не происходит, так как не образуется цень включения счетчика 5. За положеннем IV носледует ноложение, когда устройство работает, как было описано выше. При дальнейшем движении подвижного объекта / наступает положение V, прн котором включается второе реле PZ памяти, по отсчет меток пути пе произойдет, так как по образуется цепи включения счетчика 5.
Для определения местоположения реверсивно подвижных объектов в цепь включения четчика 5 могут быть введены нормально открытые контакты аппаратов направления.
Предмет изобретения
Устройство для определения местоположения подвижных объектов, содержащее располол :енные вдоль пути следования метки пути, два датчика, расположенные на подвижном
объекте один впереди другого на расстоянии, равном расстоянию между метками пути, два реле памяти, счетчик, к которому подключены блок сигнализации и управления и логический блок, в котором нормально открытые контакты первого и второго датчиков включены последовательно, отличающееся тем, что, с целью повышения точности определения местонахождения подвижного объекта, параллельно нормально открытому контакту первого датчика
по ходу движения объекта включена цепь последовательно соединенных нормально закрытого контакта первого реле памяти и нормально открытого контакта второго реле памяти, а параллельно нормально открытому контакту
второго датчика по ходу движения объекта подключена цепь последовательно соедине.чных нормально открытых контактов первого и второго реле памяти.
,dOr, ЗЩ
4
.4«|i 5 /
/
л . . л
I II - )
-bv m /ТГТП л
етди
I 7 //
: aо ,B,c8 Г71 la т т т в a A и la
/2/

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения местоположения движущихся объектов | 1971 |
|
SU451559A1 |
| Устройство автоматического управления горелками инфракрасного излучения | 1969 |
|
SU346971A1 |
| УСТРОЙСТВО для СИТНАЛИЗАЦИИ УСИЛИЙ НА КРИВОШИПНЫХ ПРЕССАХ | 1970 |
|
SU280274A1 |
| Фотоэлектрический тензометр | 1954 |
|
SU104061A1 |
| РЕВЕРСИВНЫЙ РАСПРЕДЕЛИТЕЛЬ | 1971 |
|
SU302710A1 |
| РЕЛЕЙНЫЙ ГЕНЕРАТОР С РЕЗЕРВИРОВАНИЕМ | 1967 |
|
SU201463A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ В ПРОЦЕНТАХ УДЛИНЕНИЯ ОБРАБАТЫВАЕМОГО МАТЕРИАЛА | 1968 |
|
SU217355A1 |
| Устройство для дотягивания барабана опрокидывателя в исходное положение | 1962 |
|
SU150784A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1970 |
|
SU288012A1 |
| Счетчик электрических импульсов | 1960 |
|
SU134498A1 |
4 /
jB в и а fTi щ и || а
/ J
IV
2 3
/
1,иЕЯ IB а ri ав
Ь :л-х Щ5 Ш Щ Ж§Ж й #
шз
г
U5.//
