I
Изобретение отаосится к коксохимическому машиностроению и, в частности к сигнальным, контрольным и другим вспомогательным устрюйствам, применяемым при управлении движением подвижных коксовых машин.
Известны устройства для определения местоположения движущихся объектов, содержашие установленные на пути передвижения метки, а на .движущемся объекте - датчики, установленные друг от друга на расстоянии, равном расстоянию между ме-рками, и логический блок, выполненный на контактах датчиков, и соединенный с блоком сигнализации.
Наличие большого количества контактов и запоминающих узлов, а также сбои в определении месачэположения объекта при кратковременном исчезновении напряжения в сети делают известное устройство сложным и малоэффективным.
Цель изобретения - упрощение устройства.
Эта цель достигается тем, что в логи-1 ческом блоке нормально разомкн утые кон-
такты датчиков соединены последовательно, при этом каждый из них шунтирован нормально разомкнутым контактом соседнего датчика по кольцевому обходу.
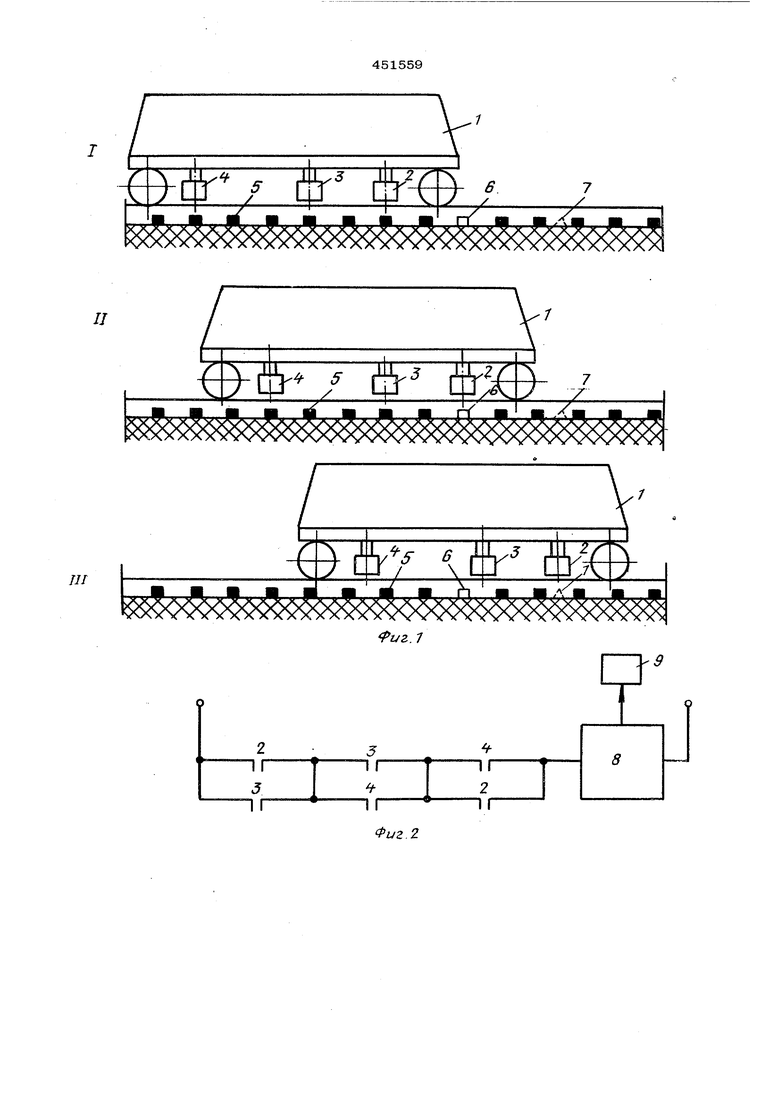
На фиг. 1 изображены возможные положения датчиков подвижного объекта относительно меток пути; на фиг. 2 - принципиальная схема включения контактов датчиков в цепи на входе счетчика.
На подвижном объекте 1 расположены
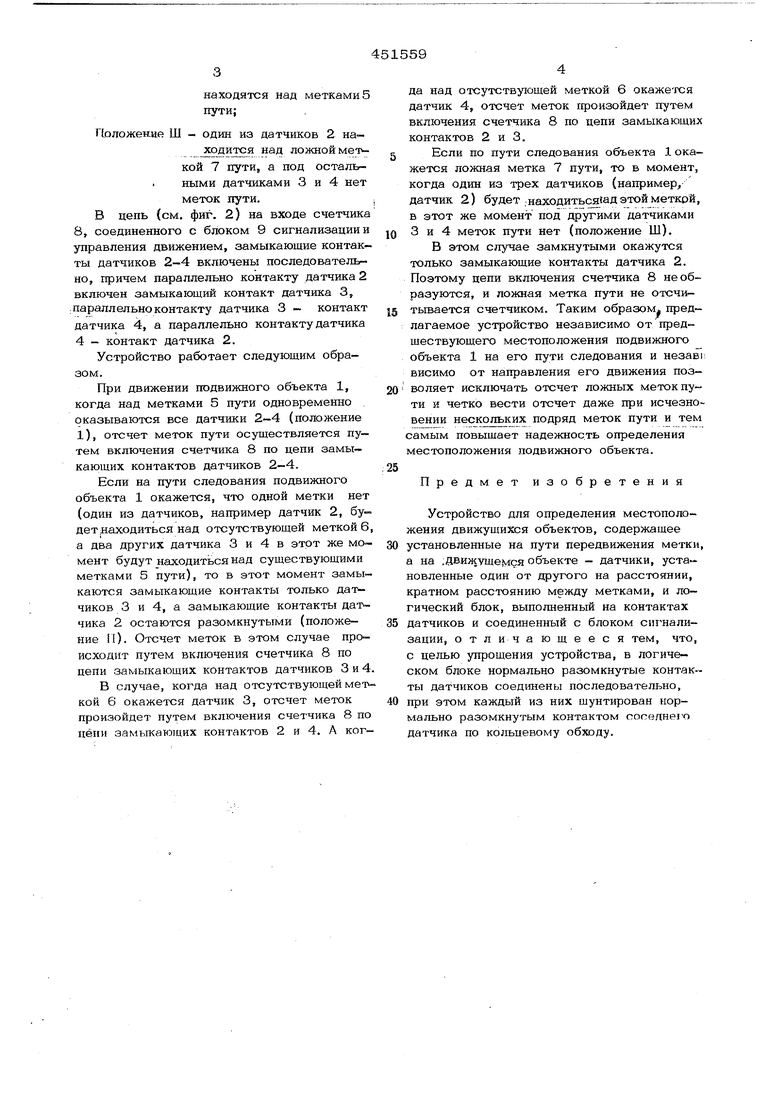
датчики 2-4 на расстоянии один от цругого, кратном расстоянию между метками 5 пути, расположенными вдоль пути следования машины. Во время передвижения объекта 1 возможны следующие положения его датчиков 2-4 относительно меток 5 пути (см. фиг. 1):
Положение 1 - датчики 2-4 объекта 1 находятся над метками 5 пути;
Положение П - один из датчиков 2 находится над отсутствующей меткой 6 пути, а остальные датчики 3, 4
находятся над метками 5 пути;
Г1оложение Ш - один из датчиков 2 ) над ложной мепкой 7 пути, а под остальными датчиками 3 и 4 нет меток пути.
В цепь (см, фиг. 2) на входе счетчика 8, соединенного с блоком 9 сигнализации и управления движением, замыкающие контакты датчиков 2-4 включены последовательно, причем параллельно контакту датчика 2 включен замыкающий контакт датчика 3, ;параллельноконтакту датчика 3 - контакт датчика 4, а параллельно контакту датчика 4 - контакт датчика 2.
Устройство работает следующим образом.
При движении подвижного объекта 1, когда над метками 5 пути одновременно оказываются все датчики 2-4 (положение 1), отсчет меток пути осуществляется путем включения счетчика 8 по цепи замыкающих контактов датчиков 2-4.
Если на пути следования подвижного объекта 1 окажется, что одной метки нет (один из датчиков, например датчик 2, будет .находиться над отсутствующей меткой 6 а два других датчика 3 и 4 в этот же момент будут находиться над существующими метками 5 пути), то в этот момент замыкаются замыкающие контакты только датчиков 3 и 4, а замыкающие контакты датчика 2 остаются разомкнутыми (положение И). Отсчет меток в этом случае происходит путем включения счетчика 8 по цепи замыкающих контактов датчиков 3 и 4
В случае, когда над отсутствующей мет кой 6 окажется датчик 3, отсчет меток произойдет путем включения счетчика 8 по цепи замыкающих контактов 2 и 4. А ког-
да над отсутствующей меткой 6 окажется датчик 4, отсчет меток гфоизойдет путем включения счетчика 8 по цепи замыкающих контактов 2 и 3.
Если по пути следования объекта 1 окажется ложная метка 7 пути, то в момент, когда один из трех датчиков (например, датчик 2) будет находиться1ад этой меткой, в этот же момент под другими датчиками 3 и 4 меток пути нет (положение Ш).
В этом случае замкнутыми окажутся только замыкающие контакты датчика 2. Поэтому цепи включения счетчика 8 не образуются, и ложная метка пути не отсчитьтается счетчиком. Таким образом, предлагаемое устройство независимо от предшествующего местоположения подвижного объекта 1 на его пути следования и незав висимо от направления его движения позволяет исключать отсчет ложных меток пути и четко вести отсчет даже при исчезно вении нескольких подряд меток пути и тем амым повыщает надежность определения естоположения подвижного объекта.
Предмет изобретения
Устройство для определения местоположения движущихся объектов, содержащее
установленные на пути передвижения метки, а на .Движущем:ся объекте - датчики, уста- новленные один от другого на расстоянии, кратном расстоянию между метками, и логический блок, выполненный на контактах
датчиков и соединенный с блоком сигнализации, отлича ющееся тем, что, с целью упрощения устройства, в логическом блоке нормально разомкнутые контакты датчиков соединены последовательно,
при этом каждый из них щунтирован нормально разомкнутым контактом соседнего датчика по кольцевому обходу.
J К±Щti
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1973 |
|
SU391958A1 |
| Устройство для управления подвижным объектом | 1983 |
|
SU1100611A1 |
| Устройство автоматической сортировки и учета вагонеток с полезным ископаемым в шахте | 1960 |
|
SU149078A1 |
| РЕГИСТРИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU379829A1 |
| Способ управления водоподачей в оросительный канал с дождевальной машиной и устройство для его осуществления | 1986 |
|
SU1351994A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2280580C2 |
| СТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНИХ МОМЕНТОВ | 1972 |
|
SU330415A1 |
| Программное устройство очередностиОбСлужиВАНия КОКСОВыХ пЕчЕй и зАТВОРОВугОльНОй бАшНи | 1979 |
|
SU802352A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1976 |
|
SU653285A2 |
| Устройство управления приводом шахтной подъемной машины | 1977 |
|
SU730631A1 |
t ;/
