Изобретение относится к области измерительной техники и может быть использовано для измерения перемещений.
Известен емкостной преобразователь перемещений, содержащий два плоских, установленных параллельно неподвижных электрода и расположенный между ними, перемещаемый перпендикулярно к ним, подвижный электрод.
Предлагаемый преобразователь отличается от известного тем, что каждый из электродов вьшолнен в виде двух разделенных диэлектрической прокладкой идентичных пластин, которые у неподвижных электродов расположены в одной плоскости, а у подвижного смещены одна относительно другой на известное расстояние в направлении рабочего перемещения подвижного электрода.
Это позволяет повысить точность измерения.
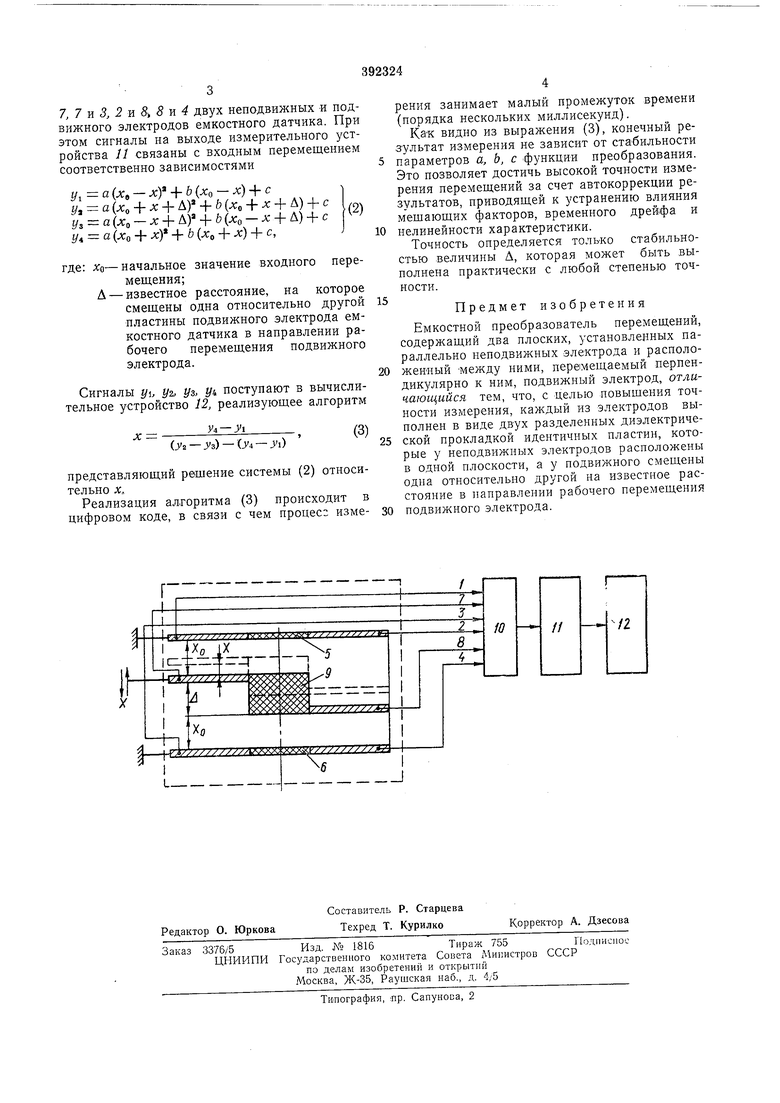
На чертеже изображен предлагаемый преобразователь.
Он содержит два неподвижных электрода, каждый из которых выполнен в виде двух идентичных пластин 1, 2 и 3, 4, разделенных диэлектрическими прокладками 5 и 5, и подвижный электрод, выполненный в виде двух идентичных пластин 7 и S, сдвинутых одна относительно другой на известное расстояние Д и разделенных диэлектрической прокладкой 9.
Выходы пластин подсоединены к коммутатору 10 и далее к измерительному 11 и вычислительному 12 устройствам.
Принцип действия предлагаемого устройства основан на том, что функция преобразования емкостного измерителя перемещений с частотным выходом на рабочем участке с достаточной степенью точности может быть представлена параболой вида:
10
(1)
у - ах + Ьх + с,
где X - входное перемещение;
у -выходной параметр устройства, например частота или число импульсов, подсчитанное за определенный интервал времени; а, Ь, с,- параметры функции преобразования.
Нестабильность коэффициентов а, Ъ, с под влиянием мещающих факторов и временного дрейфа параметров датчиков, а также других элементов измерительной -цепи преобразователей является источником погрещности измерения линейных перемещений. Для устранения влияния вариаций указанных параметров на точность измерения перемещений в предлагаемом преобразователе с помощью коммутатора 10 к измерительному устройству // в любой .последовательности подключаются следующие пары пластин: / и 7, 7 и 5, 2 и S 5 и 4 двух неподвижных и подвижного электродов емкостного датчика. При этом сигналы на выходе измерительного устройства 11 связаны с входным перемещением соответственно зависимостями г/1 а (х - х) (Ло - л) 4- с г/, :г а (0 + -« + А) + Ь (л„ + + А) + с г/3 а (лго - л: + А) + 6 (х - л + А) + с У4 а(х + х) ( + с. где: Хй- начальное значение входного перемещения;А - известное расстояние, на которое смещены одна относительно другой пластины подвижного электрода емкостного датчика в направлении рабочего перемещения подвижного электрода. Сигналы г/ь уъ Уз, yt поступают в вычислительное устройство 12, реализующее алгоритм (У - Уз) - (4 - Jl) представляющий решение системы (2) относительно X, Реализация алгоритма (3) происходит в цифровом коде, в связи с чем процесг измерения занимает малый промежутОК времени (порядка нескольких миллисекунд). Как видно из выражения (3), конечный результат измерения не зависит от стабильности параметров а, Ь, с функции преобразования. Это позволяет достичь высокой точности измерения перемещений за счет автокоррекции результатов, приводящей к устранению влияния мещающих факторов, временного дрейфа и нелинейности характеристики. Точность определяется только стабильностью величины А, которая может быть выполнена практически с любой степенью точности. Предмет изобретения Емкостной преобразователь перемещений, содержащий два плоских, установленных параллельно неподвижных электрода и расположенный Между ними, перемещаемый перпендикулярно к ним, подвижный электрод, отличающийся тем, что, с целью повышения точности измерения, каждый из электродов выполнен в виде двух разделенных диэлектрической прокладкой идентичных пластин, которые у неподвижных электродов расположены в одной плоскости, а у подвижного смещены одна относительно другой на известное расстояние в направлении рабочего перемещения подвижного электрода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостной преобразователь перемещений | 1978 |
|
SU750265A1 |
| Емкостной преобразователь перемещений | 1974 |
|
SU488979A1 |
| Емкостной преобразователь перемещений | 1982 |
|
SU1043482A1 |
| Емкостной преобразователь перемещений | 1984 |
|
SU1226017A2 |
| Емкостный преобразователь перемещения | 1979 |
|
SU926527A1 |
| Устройство для измерения внутренних напряжений | 1989 |
|
SU1615575A1 |
| ЕМКОСТНЫЙ ДАТЧИК ДАВЛЕНИЯ И РАЗНОСТИ ДАВЛЕНИЙ | 1997 |
|
RU2126533C1 |
| Емкостный дифференциальный преобразователь перемещений | 1991 |
|
SU1796880A1 |
| Дифференциальный емкостный преобразователь углового перемещения | 1990 |
|
SU1838755A3 |
| Емкостная преобразовательная система | 1989 |
|
SU1582878A1 |
I
