(54) ЕМКОСТНОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостной преобразователь перемещений | 1974 |
|
SU488979A1 |
| Устройство для измерения внутренних напряжений | 1989 |
|
SU1615575A1 |
| Емкостной преобразователь перемещений | 1982 |
|
SU1043482A1 |
| Емкостный акселерометр | 1987 |
|
SU1561047A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕСА ЗАРЯДОВ | 1985 |
|
RU2047112C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДАВЛЕНИЯ И РАЗНОСТИ ДАВЛЕНИЙ | 1997 |
|
RU2126533C1 |
| ЕМКОСТНОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU392324A1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2266521C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2300773C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИПОЧВЕННОГО ИЗМЕРЕНИЯ АГРОТЕХНОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ПАХОТНОГО СЛОЯ ПОЧВЫ В ДВИЖЕНИИ | 2013 |
|
RU2537908C2 |
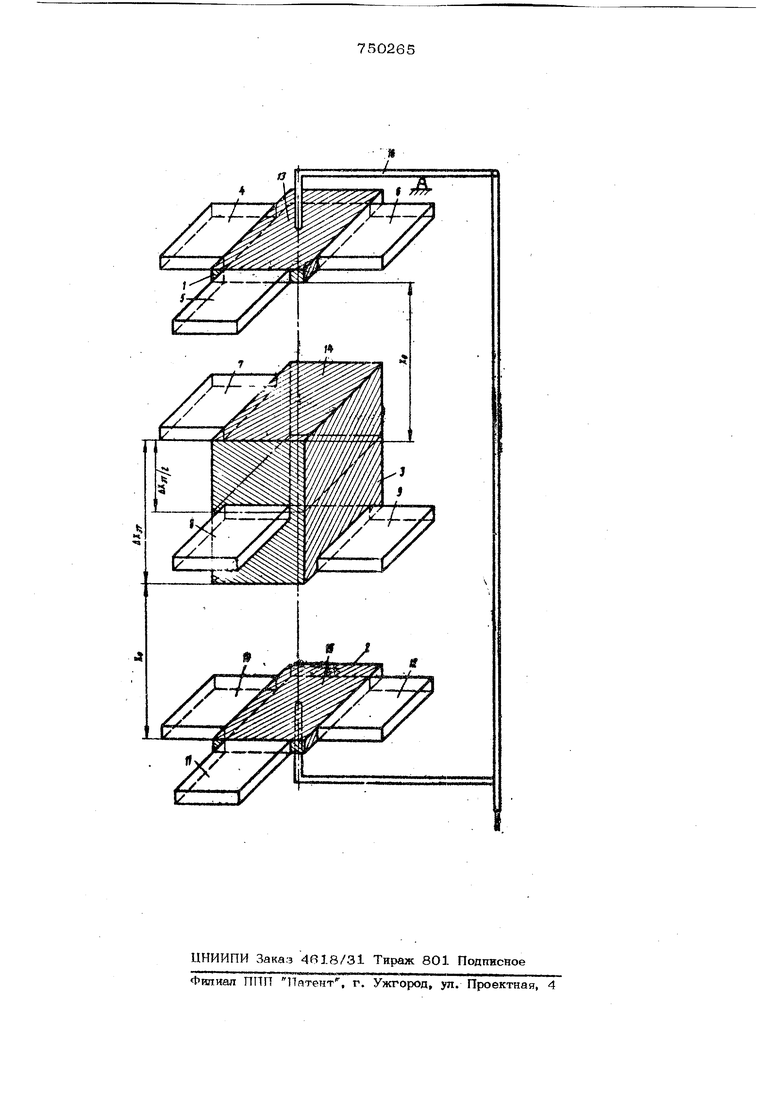
Изобретение относится к области измерительной техники и может быть использовано в приборах и информационно-измер тельных системах для высокоточных изме рений линейных перемещений. Известны емкостные преобразователи перемещений, выполненные в виде плоскопараллельных конденсаторов l, Недостатками известных преобразователей перемещений являются большие погрешности измерений, вызываемые вариацией внешних условий временным дрейфом характеристик преобразователя и неидентичностью отдельных емкостньт преобразователей, а также погрешность нелинейности. Наиболее близким по технической сушности к изобретению является емкостной преобразователь перемещений 2, содержащий, соединяемый одним ллечом с измеряемым объектом рычаг, параллельно расположенные подвижный и неподвижный электроды, выполненные в виде двух разделенных диэлектрической прокладкой нден тичных пластин, которые у неподвижного электрода смещены одна относительно другой на известное расстояние, а у подвижного электрода - расположены в одной плоскости и соединены с другим плечом рычага. Однако при кусочно-линейной аппроксимации существенно нелинейной функции преобразования (ФП) отрезки аппроксимирующихся прямых становятся очень малы, что приводит к возрастанию погрешности известного преобразователя. Цель изобретения - повышение точности измерений. Это достигается тем, что преобразователь снабжен дополнительным подвижным электродом, расположенным симметрично основному подвижному электроду относи-, тельно неподвижного и связанным с присоединяемым к объекту плечом рычага, каждый из электродов снабжен дополнительной пластиной, отделенной от основных пластин диэлектрической прокладкой и расположенной перпендикулярно основным плясгинам с одной стороны относительно вертикальной оси преобразователя, дополнительная пластина расположена в одной плоскости с основными пластинами у под вижных электродов и в плоскости, смещенной в направлении рабочего перемещения симметрично плоскости основных пластину неподвижного электрода, дополнительные пластины идентичны одна другой и основным пластинам электродов. На чертеже представлена структурная схема емкостного преобразователя переме щений. Преобразователь выполнен в виде па-раллельно расположенных двух подвижных 1, 2 и одного неподвижного 3 электродае каждый из которых состоит из трех идентичных пластин 4-12 разделенных друг от друга диэлектрическими прокладками ISIS, имеющих одинаковые поперечные габа риты и расположенных на одной вертика ли. Причем у подвижных электродов 1 и 2 пластины 4-6 и 10-12, соответственно лежат в одной плоскости, а у неподвижного электрода 3 пластины 7-9 смещены относительно друг друга на известную величину дХэт/2.. При этом геометрические оси симметрии пластин 5, 8 и 11 составляют с соответствующими осями пластин 4, 6; 7, 9; 10, 12 прямой угол. Начальные расстояния между подвижными йлектродами 1, 2 и, соответственно пластинами 7 и 9 . неподвижного электрода одинаковы. Подвижный электрод 1 соединен с одним из плеч рычага 16, имеющим коэффициент передачи К-1, другое плечо которого взаи модействует с измеряемым объектом. Подвижный электрод 2 непосред ственно взаимодействует с измеряемым объектом. Принцип действия описываемого преоб разователя основан на том, что его ФП перемещения в электрический сигнал может быть достаточно точно в щироком диа пазоне изменения измеряемой величины У представлена в виде + а X l.j O( QgX + X - измеряемое перемещение; Ч - выходной сигнал устройства в виде частоты переменного тока или импульсов напряжения; а,-Ох- параметры ФП устройства, явля ющиеся случайными функциями времени и внешних условий. Нестабильность параметров а 5-04 и величина коэфф1щиентов Oij опреде ляющих неггинейность системыв являются сточниками погрешности измерения ещений, Для исключения влияния нестабидъ/-: си указанных параметров 7и их значен ,:й а точность измерения, к измерител-:;;;: ;, хеме устройства к любой последоваv/S.cbости подключаются пары пластин 4 к , и 8, 6 и 9, 10 и 7, 11 и 8, 12 s , резушэтате щести тактов преобразоваИИ- получают следующую систему уравнеий, связывающих выходной сигнал устройтва с соответствующей измеряемой велииной тестов x -vx-b,Хо+-Х Хэ,Хо4КХ, t к X ::::: , X Q-I- X X 2. к исследуемого параметра -. o..) + ,(.+ C( (.( о.х.;.а, 2, АХэт -g-j , ,(Хо -х АХэтУаэ о А эт)+ -a4Xo4X -ЛXзO , У2,()Шз()a4() /ДХэт /ДХэт У4 ai a2 o -кx+- 4aз(xo+кx4-2 j + У5 (2(Хо КХ -ДХэт .)+аа( 4a4(Xo+KX4-AX.5T.f, откуда получают Уо У5-У2-Уз yo yz ys- ys- yi-Sy 2{к-1) Как видно из этого выражения, результат измерения не зависит от параметров ФП устройства. Таким образом искяючаетйя вли1(ние параметров а и а 4 , определяющих нелинейность ФП устройства на величину суммарной погрещности, а также на выбор тестообразующих величиндх и к . Точность измерения перемещения с помощью предложенного устройства определяется только стабильностью известной величины Д X зт ,1 оэффиииента К передачи и иден ичностью пластин электродов. Формула изобретения Емкостной преобразователь перемещений, содержащий соединяемый одаим плеом с измеряемым объектом рычаг, параллельно расположенные подвижный и неподвижный электроды, выполненные в виде Двух разделенных диэлектрической проклад кой идентичных пластин, которые у неподвижного электрода смещены одна относительно другой на известное расстояние, а у подвижного электрода - расположены в одной плоскости и соединены с другим плечом рычага, отличающийся тем, что, с целью повышения точности измерений, преобразователь снабжен дополнительным подвижным электродом, расположенным симметрично основному подвижному электроду относительно неподвижного и связанным с присоединяемым к объекту плечом рычага, каждый из электродов снабжен дополнительной пластиной, отделенной от основных пластин диэлектрической прокладкой и расположенной перпен дикулярно основным пластинам с одной стороны относительно вертикальной оси преобразователя, дополнительная пластина расположена в одной плоскости с основными пластинами у подвижных электродов и в плоскости, смещенной в направлении рабочего перемещения симметрично плоскости основных пластн - у неподвижного электрода, дополнительные пластины идентичны одна другой и основным пластинам электродов. Источники информации, принятые во внимание при экспертизе 1.Туричин А. М. и др. Электрические измерения неэлектрических величин, Энергия, М., 1975, с. 294. 2.Авторское свидетельство СССР N9 488979, кл. & 01 В 7/О8, от 15.01.74 (прототип).
