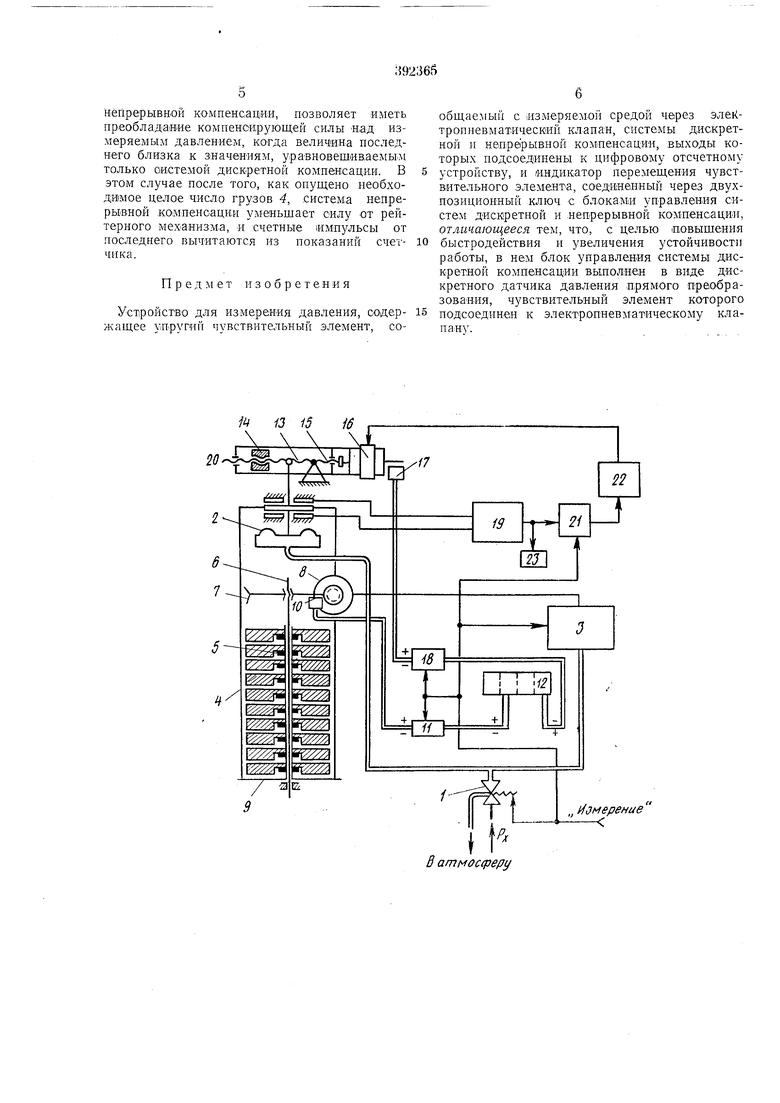
Изобретение относится к контрольно-измерительной технике, а именно к манометрам с дискретно-непрерывной комлеисацией. Известны устройства для измерения давления, Содержащие упругий чувствительный элемент, сообщаемый с .из,меряемой средой через электропневматический клапан, системы дискретной и непрерывной компенсации, выходы -которых подсоединены к цифровому отсчетному устройству, и индикатор перемещения чувствительного элемента, соединенный через двухпозиционный ключ с блокам-и управления систем дискретной и непрерывной компенсации. Известные устройства И:меют малое быстродействие, и показания их неопределенны изза |И:нерцион;ной механической системы. В предлагаемом устройстве, с целью повышения быстродействия и увеличения устойчивости его работы, блок управления системой дискретной компенсации выполнен в виде Дисюретного датчика давления прямого преобразования, чувствительный элемент которого подсоедЕНен к электроиневматическому клапану. На чертеже представлена схема устройства. Измеряемое давление Рх, через трехходовой электропневматический клапан 1 подается под мембрану 2 и на вход дискретного датчика 3 давления прямого преобразования. Давление РХ: изменяется по принципу динамической силовой компенсации двумя систсмалш, дискретной и ненрерывио. Система дискретной компенсации имеет подъемно-навешивающий механизм, состоящий из набора грузов 4, перемещаемых с номощью втулок 5, закрепленных на штанге 6. Подъемная щтанга 6 совершает поступательное движение при вращении гайки 7 двигателем 8. Размер втулок 5 по высоте выбран так, что расстояние между подвещеннылги на них грузами 4 равно шагу винтовой пары штапга 6- гайка 7. Таким образом, при повороте гайки 7 на 360° в направлении опускания щтанги нижний груз 4 ложится на грузовую тарелку 9, действующую непосредственно на мембрану 2. При следующем обороте гайки 7 па первый уже на тарелке 9 груз 4 ложится второй и т. д., что позволяет по числу оборотов суднть о количестве действующих на чув ствительньп элемент грузов 4. Число оборотов гайки 7 отсчитывается датчиком 10 импульсов, сигнал которого поступает через ключ 11 на вход старших разрядов электронного цифрового реверсивного счетчика 12. При опускании грузов 4 датчик 10 выдаст сигнал на шину сложения () счетчика 12, a пр:И подъеме груза - на шину вычитания («-). Система непрерывной компенсации предназначена для создания точного компенсирующего усил.ия в пределах веса -одного груза в процессе изменения. В нерабочее время эта система компенсирует вес грузовой тарелки 9 и жесткого центра, упругую силу мембраны 2, а также изменение этих сил в зависимости от температуры и других условий. Переменная по знаку « величине непрерывная комленсирующая сила создается рычагом 13 и изменяется при перемещении груза 14 микрометрическим винтом 15. Винт приводится во вращение встроенным в рычаг 13 электродвигателем 16. Величина компенсирующей силы или пропорциональное ей перемещение груза 14 отсчитывается с помощью датчика 17 оборотов М11кро:метрического винта 15 младшим1И раз рядами электронного реверсивного счетчика 12, причем при возрастании силы сигналы от датчика 17 поступают на шину сложения («-f) младшего разряда счетчика, а при уменьшении силы - на шину вычитания («-). Сигналы от датчика 17 поступают на счетчик 12 через ключ 18, управляемый сигпалом «Измерение. Положение мембраны 2, т. е. отклонение ее от нейтрали под действием каких-либо сил, контролируется бесконтактным индикатором 19 малых неремещений, имеющим в качестве чувствительного элемента иеремеи;ения дифференциаль 1ую емкость 20 с одной ИОДВИЛуНОЙ и двумя Н|еПОДВИЖНЫМ:И пластинами. Подвижная средняя пластина жестко связана с чувствительным элементом давления мембраной 2 так, что при отклонении мембраны 2 от нейтрального положения на выходе индикатора 19 появляется сигнал, соответствующий наиравлению отклонения, (перекомпенсации или иедоко мпенсации). Этот сигнал подается на двухпозиционный ключ 21, управляющий направлением вращения двигателя 16 рейтерного механизма через блок 22 управления системы непрерывной компенсации. При этом сигнал недокомненсации вызывает либо увеличение компенсирующей силы, что соответствует в;ращению двигателя 16 в одну сторону, либо уменьшение компенсирующей силы (вращение двигателя в противоположную сторону). В первом случае счетные импульсы от датчика 17 поступают на шину (« + ) .младших разрядов реверсивного счетчика 12, во втором случае - на шину («-) этого счетчика. Перед началом измерения полости мембраны 2 и датчика 3 находятся под атмосферным давлением. Если сигнал измерения отсутствует, ключи // и 18 закрыты, а двухпозиционный ключ 21 связывает индикатор 19 с блоком 22 управления системы непрерывной компенсации. Поэтому, если мембрана 2 находится в неравновесном положении из-за «сползания нуля, то индикато.р 19 управляет перемещением груза 14 до тех пор, пока рычаг 13 не вернет мембрану 2 в нейтральное положение. Импульсы датчика 17, возникающие при перемещении груза 14, не пропускаются на счетчик, так как закрыт ключ 18. После возврата мембрлны 2 в нейтральное положение выходЕой сигнал индикатора 19 пропадает. Таким образом происходит «отработка нуля, после чего ирибор готов к измерению, что и отмечается блоко.м 23 оигнализ-ации. Измерение давления начинается .подачей в схему сигнала «Измерение. Этот сигнал открывает ключи // и 18, запускает дискретный датчик 3 давления, через ключ 21 открывает индикатор 19 и открывает электроупрлвлявмый клапан / на входе измеряемого давления, подавая тем самым давление под мембрану 2 и на вход датчика 5. При этом датчик 3 действует на систему дискретной компенсации, навешивая на тарелку 9 необходимое число грузов 4. По мере опускания каждого груза счетные импульсы датчика 10 поступают на шину (« + ) старших разрядов счетчика 12. Одновременно с работой системы дискретной компе.нсации индикатор 19, получая сигнал разбаланса между давление: 1 и силой от дифференциальной емкости 20, через блок 22 воздействует на двигатель 16 системы непрерывной компенсации, создавая усилие на мембрану 2. При вращении винта 15 счетные импульсы от датч.ика 17 .поступают на ипгпу («-Ь) младших разрядов счетчика 12. В момент компенсации (когда входное давление но изменяется, что отмечается также блоком 23 сигнализации) счетчик 12 показывает величин} измеряемого давления. .Прибор остается включенным и при изменении давления, напр.И1мер уменьшении, и работает следующим образом. Когда на входе датчика 5 давление изменяется, носледний вырабатывает новый сигнал, соответствующий измененному состоянию Рх, и, управляя двигателем 8 системы дискретной компенсации, поднимает необходпмое число грузов 4. При этом счетные и rиyльcы от датчика 10 .поступают на шину («-), старш.их :разрядов счетчика 12 (показания вычитаются). Одновременно на вход .ипдикатор.а 19 поступает разбаланс другого знака от дифференциальной емкости 20 и через блок 22 управления, двигатель 16 начинает вращаться в сторону уменьшения силы, действующей на мембрану 2. При этом счетные импульсы от датчика /7 поступают на шину («-) счетЧ1Ика 12. Таким образом, устройство постоянно следит за величиной измеряемого давления, а показания счетчика 12 в каждый момент времени соответствуют измеряемому Рх. Описанный алгоритм устройства, когда одновременно с работой системы дискретной компенсации вступает в работу .и система
5
иёГ1рерывн.ой компенсации, позволяет иметь преобладание компенсирзющей силы «ад измеряемым давлением, когда величина последнего близка к значениям, уравновешивлемы.м только системой дискретной компенсации. В этом случае после того, как опущено необходимое целое число грузов 4, система непрерЫВной компенсации уменьшает силу от рейтерного механизма, и счетные импульсы от последнего вычитаются из показаний счетчика.
Пред м е т изобретения
Устройство для измерения давления, содержащее упругий чувствительный элемент, соб
общаемый с измеряемой средой через эле тропневматический клапан, системы дискретной и неире;рывной компенсации, выходы которых подсоединены к цифровому отсчетному устройству, и индикатор перемещения чувствительного элемента, соединенный через двухпозиционный ключ с блоками управления систем дискретной и .непрерывной компенсации, отличающееся тем, что, с целью повышения
быстродействия и увеличения устойчивости работы, в нем блок управления системы дискретной компенсации выполнен в виде дискретного датчика давления прямого преобразования, чувствительный элемент которого
подсоединен к электропневматическому клапану.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1967 |
|
SU203292A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1970 |
|
SU259440A1 |
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА ТЯЖЕСТИ ГИРОМОТОРА ВДОЛЬ ОСИ ВРАЩЕНИЯ РОТОРА | 1964 |
|
SU164995A1 |
| Цифровые электромагнитные весы | 1989 |
|
SU1631305A1 |
| Весоизмерительное устройство | 1976 |
|
SU653516A1 |
| Измеритель давления | 1980 |
|
SU932309A1 |
| ЛОГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ САМОНАСТРАИВАЮЩИХСЯСИСТЕМ | 1966 |
|
SU181171A1 |
| АВТОМАТИЧЕСКИЙ КОМПЕНСАТОР ПЕРЕМЕННОГО ТОКА | 1971 |
|
SU310185A1 |
| Весы с электромагнитным уравновешиванием | 1980 |
|
SU909583A1 |
| Измеритель давления | 1975 |
|
SU588477A1 |
