К высокопрецизионным гиромоторам предъявляются жесткие требования по стабильности положения центра тяжести во времени, зависящей от температурных и иных условий.
Известные установки определения смещения центра тяжести гиромотора вдоль оси вращения ротора содержат измерительный элемент, представляющий собой раму гироузла в виде цилиндрического поплавка, который взвешен в жидкости с укрепленным внутри рамы испытуемым гиромотором, а также балансировочный груз для приведения измерительного узла в нулевое положение по крену и дифференту; арретирующее и отсчетное устройства. Но они не определяют смещение центра тяжести гиромотора до установки его в гироузел поплавкового гироскопического прибора, так как в измерительном устройстве возникают моменты трения, соизмеримые с определяемыми.
Предлагаемая установка обладает высокой чувствительностью, так как в ней исключено влияние веса испытуемого гиромотора и измерительного устройства на точность снимаемых показаний.
Чувствительным элементом установки является торсионный подвес, обладающий практически пренебрежимым внутренним трением. Установка работает по принципу силовой компенсации с приведением измерительного устройства в одно и то же положение.
фиксируемое нуль-индикатором, что исключает погрешности, возникающие при повороте измерительного устройства. Установка позволяет замерять моменты от смещения центра
тяжести как в динамическом, так и в заторможенном режиме гиромотора (как его отдельны.х эле.ментов, так и в целом), что дает возможность использовать ее при оценке факторов влияющих на смещение центра тяжести,
разработке гиромоторов повышенной точности и для контроля гиромогоров в пропзводстве} ных условиях.
Для этого измерительный узел скреплен с основанием установки по оси цилиндра торсионами, по углу скручивания которых определяют момент смещения центра тяжести гиромотора (центр смещается вдоль оси вращения ротора), и содержит рейторное приспособление. Это приспособление помещено внутри поплавка и уравновешивает момент, который возни сает из-за влияния вращения Земли, подбором груза по известному плечу.
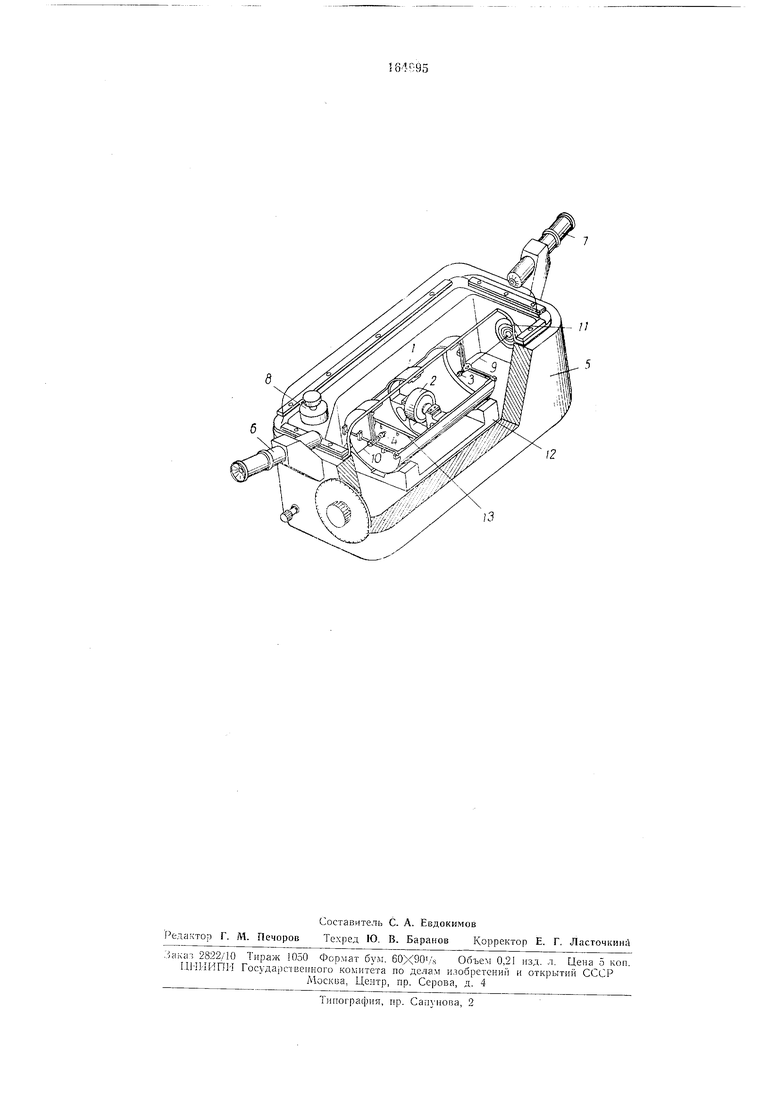
На чертеже схематически изображена предлагаемая установка.
Установка состоит из измерительного узла, представляющего собой раму в виде поплавка /, с укрепленным внутри нее с помощью накладок гиромотором 2. На площадке размещены балапсировочные грузы 3 и 4 для стаПоплавок погружен в жидкость, находящуюся Е ванне 5 так, что вес измерительного узла уравновешивается весом вытесненной жидкости. Положение ноплавка относительно осей определяется с помощью отсчетных устройств 5 и 7. Для компенсации неидентичности гиромоторов по весу применяется устройство 8, с помощью которого регулируется уровень жидкости.
К поплавку но оси его вращения прикрепляются торсионы 9 и 10, изготовленные из специального сплава. Торсион 9 закреплен одним концом на поплавке, другим - на мембране //. Мембрана является компенсирующим элементом для ослабления натяжения нити во избежание ее обрыва в случае перегрузки. В то же время мембрана создает необходимое для обеепечения работоепособности установки натяжение нити. Торсион 10 закреплен одним концом на поплавке, а другнм - на оси отсчетного устройства 6 илн иа осн редуктора, связанного с отсчетным устройством. Отсчетное устройство служит для отсчета измеряемого момента после приведения системы в нулевое положение, в котором измерительный узел фиксируется с помощью арретируюшего устройства /2.
Питание гиромотора осуществляется с номощью безмоментных токонодводов (на чертеже не показаны).
После установки и закрепления гиромотора в поплавке измерительный узел разарретируется и проверяется его полонсение относительно взаимно перпендикулярных оеей. В случае необходимости он балансируется с помощью грузов 3 и 4, пока отсчетные устройства 6 и 7 не зафиксируют нулевое положение измерительного узла. Балансировка производится в заарретированном ноложении поплавка.
После зстаноБки в нулевое положение узел арретируется, гироскопический моменг о влияния вращения Земли компенсируется с
номощью рейтерного приспособления 13, гиромотор включается и разгоняется. Через определенные промежутки времени измеряется момент от смещения центра тяжести. Для этого узел разарретируется с целью онределения иаправлепия его отклонения и вращением оси отсчетного устройства скручивается нить, приводя измерительный узел в нулевое положение, после чего он вновь арретируется.
По углу иоворота оси отсчетиого устройства 6 онределяется измеряемый момент. Отсчетное устройство тарируется с номощью эталогных грузов и рейтерного нриенособления. Это приспособление состоит из стержня, укрепленного внутри поплавка, с перемещающимися грузами. Подбором грузов по известному плечу (или плеча по известному грузу) определяют компенсирующий момент.
Предмет изобретения
Установка для определения смещения центра тяжести гиромотора вдоль оси вращений ротора, содержащая измерительный узел,
представляющий собой раму гироузла в виде цилиндрического поплавка, взвешенного в жидкости с укрепленным внутри рамы испытуемым гиромотором; балансировочный груз для приведения измерительиого узла в нулевое положение по крену и дифференту; основание, арретирующее и отсчетное устройства, отличающаяся тем, что, с целью увеличения чувствительности и уменьшеиия погрешности измерений, измерительный узел скреплеи с основанием установки по оси цилиндра торсионами, но углу скручивания которых определяется измеряемый момент, возникающий от смещения центра тяжести гиромотора вдоль оси вращения ротора, и содержит
рейторное нриснособление, помещенное внутри поплавка, уравновешивающее момент, возникающий из-за влияния вращения Земли, подбором груза по известному плечу.
12
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор успокоителя качки корабля | 1983 |
|
SU1080190A1 |
| АСТАТИЧЕСКИЙ ПОПЛАВКОВЫЙ ГИРОКОМПАС | 1969 |
|
SU252636A1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕБАЛАНСА ГИРОУЗЛА ВИБРАЦИОННЫМ МЕТОДОМ | 2023 |
|
RU2815479C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Способ определения дисбаланса поплавковых гироузлов и устройство для его осуществления | 1984 |
|
SU1226083A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
| СПОСОБ ПРОВЕРКИ ДЕФЕКТА ОПОР ГИРОУЗЛА В ПОПЛАВКОВОМ ГИРОСКОПИЧЕСКОМ ДАТЧИКЕ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2019 |
|
RU2730369C1 |