1
Изобретение относится к области станкостроения.
Известны фотокопировальные системы, содержащие фотоголовку, синусно-косинусный распределитель, усилители мощности, координатные двигатели, исполнительный двухкоординатный механизм, задающий двухкоординатный механизм (копировальный столик) и рабочий орган. Эти системы обеспечивают обработку деталей по траекториям, лежащим в одной плоскости или в параллельных плоскостях. Обрабатывать объемные детали с пространственно-сложными поверхностями на этих системах нельзя.
Цель изобретения - обеспечение управлеНИН движением рабочего органа по трем координатам при обработке объемных деталей с пространственно-сложными поверхностями произвольной формы по чертежам-копирам.
В предлагае.мой фотокопировальной системе к валам двух координатных двигателей исполнительного механизма нодсоединены счетчики абсолютного значения числа оборотов, а выходы счетчиков через суммирующее 3|Вено и усилитель связаны с приводом задающей подачи фотоследящего столика, фотоголовка которого через преобразователь и усилитель подключена к третьему координатному двигателю системы, выход которого связан с ходовым звеном по третьей координате исполнительного механизма и ходовым звеном следящей подачи фотоследящего столика.
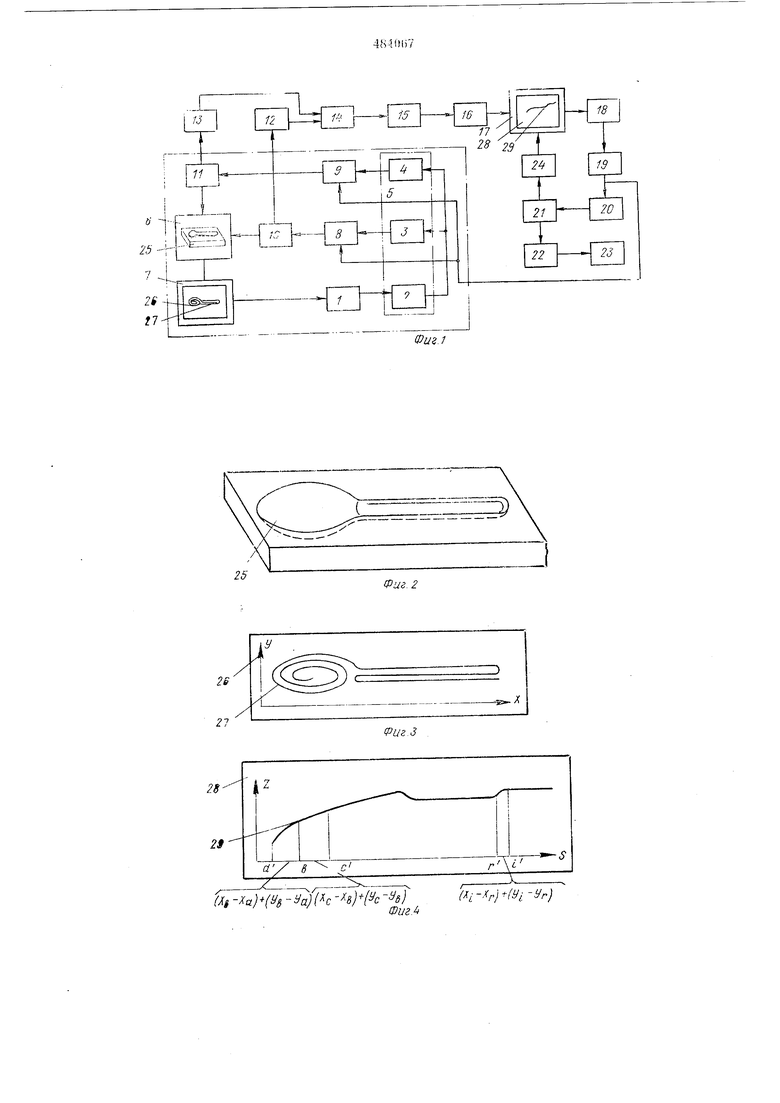
На фиг. 1 представлена функциональная схема предлагаемой фотокопировальной системы; на фиг. 2 - образец обрабатываемой детали; на фиг. 3 - чертеж-копир, устанавливаемый на столике фотокопировальной системы; на фиг. 4 - чертеж, устанавли:ваемый на фотоследящем столике.
Фотокопировальная система содержит фотоголовку 1, выход которой подключен к входу преобразователя 2 импульсов развертки в фазу синусоидального напряжения. Выход преобразователя 2 подключен к фазовым детекторам 3 и 4, которые вместе с преобразователем 2 образуют синусно-косинусный распределитель 5. Выходы детекторов 3 и 4 связаны с двухкоординатным исполнительным механизмом 6 системы и копировальным столиком 7 через усилители мощности 8 и 9 и координатные двигатели 10 и И. С валами двигателей 10 и 11 связаны счетчики 12 и 13 абсолютного значения числа оборотов, выходы которых через суммирующее звено 14 и усилитель 15 связаны с двигателем (приводом) 16 задающей подачи фотоследящего столика 17. Фотоголовка 18 фотоследящего столика 17 через преобразователь 19 и усилитель 20 подключена к третьему координатному двигателю 21, выход которого связан с ходовым звеном 22 перемещения рабочего органа 23 по третьей координате и ходовым звеном 24 следящей подачи фотоследящего столика 17. Выход преобразователя 19 связан также со вторыми входами усилителей мощности 8 и 9. Работает фотокопировальная система следующим образом. Обрабатываемую деталь 25 устанавливают на двухкоординатный исполнительный механизм 6. На копировальный столик 7 устанавливают чертеж-копир 26, на котором нанесена проекция (линия 27) пространственной траектории движения рабочего органа 23 относительно детали 25 на плоскость, проходящую через первую и вторую координатные оси исполнительного механизма, а на фотоследящий столик 17 -- чертеж 28, на котором нанесена лииия 29, одна из координат каждой точки которой (например, точки i) соответствует сумме абсолютных значений разностей координат точек линии 27, нанесенной на чертеже-копире 26, начиная от начальной точки и до определяемой точки i, и равной () + (Уь-Уа}+(-,) + () + +(ха--,+(Уа-Ус}+ +()+(У/-Уг) где Ха, Уа - координаты начальной точки; Xi, г/г - координаты определяемой точки; УЬ УС yd координаты точек линии 27 от начальной точки до определяемой точки i, в которых угол наклона касательной равен kk 0, 1, 2, . . ., п. Вторая координата каждой точки линии 29 соответствует третьей координате пространственной траектории движения рабочего органа 23. Импульсы фототока, выдаваемые фотоголовкой 1, преобразуются преобразователем 2 в управляющее напряжение переменного тока, фаза которого соответствует направлению копируемой линии. Это напряжение преобразуется фазовыми детекторами 3 и 4 в напряжения постоянного тока, величина и знак которых соответственно пропорциональны синусу и косинусу фазы управляющего напряжения. Напряжения постоянного тока после усиления усилителями 8 и 9 вращают координатные двигатели 10 и 11, перемещающие деталь 25, установленную на двухкоординатный механизм 6, и копировальный столик 7 в направлении, заданном линией 27 чертежа-копира 26. Счетчики 12 и 13 выдают сигналы, соответствующие числу проделанных двигателями 10 и 11 оборотов. Эти сигналы после суммирования в звене 14 и усиления усилителем 15 управляют работой двигателя 16, перемещающего фотоследящий столик 17 по задаюпаей подаче на величину, пропорциональную числу оборотов, проделанных двигателями 10 и 11 совместно. При этом фотоголовка 18 при помощи преобразователя 19, усилителя 20, координатного двигателя 21 и ходовых звеньев 22 и 24 отслеживает линию 29 в направлении третьей координаты и перемещает в этом же направлении рабочий орган 23. В результате совместной работы двигателей 10 и 11 и 21 рабочий орган 23 перемещается по пространственно-сложной траектории относительно детали 25 и осуществляет обработку ее пространственно-сложных поверхностей. Преобразователь 19 выдает также сигнал, пропорциопальный наклону линии 29, который вводится в усилители мощности 8 и 9, изменяя контурную скорость копирования. П р е д м е т изобретения Фотокопировальная система, содержащая рабочий орган и фотоголовку, связанную через синусно-косинусный преобразователь и усилители мощности с координатными двигателями, подключенными к исполнительному двухкоординатному механизму перемещения копировального столика, отличающаяся тем, что, с целью управления движением рабочего органа по трем координатам при обработке деталей с пространственно-сложными поверхностями произвольной формы по чертежам-копирам, к валам двух координатных двигателей исполнительного механизма подсоединены счетчики абсолютного значения числа оборотов, а выходы счетчиков через суммирующее звено и усилитель связаны с приводом задающей подачи фотоследящего столика, фотоголовка которого через преобразователь и усилитель подключена к третьему координатному двигателю системы, выход которого связан с ходовым звеном по третьей координате исполнительного механизма и ходовы.м звеном следящей подачи фотоследящего столика.
/J
11
28 7/ 1
5
И- V4 8
r
.,...feir:J
5
zJ
-чи
ZS tlLir

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для одновременного прослеживания линий нескольких чертежей-копиров | 1975 |
|
SU540722A1 |
| Фотокопировальное устройство для управления станком | 1978 |
|
SU750436A1 |
| Устройство для копирования | 1974 |
|
SU537361A1 |
| Адаптивная фотокопировальная система | 1973 |
|
SU458425A1 |
| ФОТОКОПИРОВАЛЬНО-ПРОГРАММНАЯ СИСТЕМА | 1973 |
|
SU365222A1 |
| Самонастраивающаяся фотокопировальная система | 1969 |
|
SU327753A1 |
| ФОТОКОПИРОВАЛЬНОЕ УСТРОЙСТВО | 1972 |
|
SU348337A1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ И НАПЛАВКИ | 1970 |
|
SU435077A1 |
| Фотокопировальная система управле-Ния | 1978 |
|
SU813368A1 |
| ФОТОКОПИРОВАЛЬНОЕ УСТРОЙСТВО ДЛЯ КОПИРОВАНИЯ КОНТУРОВ ПО ЭКВИДИСТАНТНЫМ ТРАЕКТОРИЯМ | 1973 |
|
SU406705A1 |