1
Предлагается конструкция датчика нулевого положения, предназначенного для выработки электрических сигналов, фиксирующих с высокой точностью положение двух соосных независимо вращающихся валов, применяющегося, например, в некоторых типах гидроприборов.
Известны датчики нулевого положения с емкостным.и преобразователями. Недостатками таких датчиков являются большая величина остаточного напряжения и чувствительность к запаздыванию по времени выходного сигнала.
В ряде случаев кроме вращения валов в соосном положении, пр.и котором измеряется угловое положение, необходимо обеспечить возможность выхода одного вала из соосного положения в лю;бом направлении на любой угол. Известные датчики с емкостными преобразователями lie обеспечивают этой возможности.
Целью изобретения является создание конструкции датчика нулевого положения, обеспечивающей ф.иксацию исходного положения двух соосно вращающихся валов с точностью (стабильностью) не хуже 1 дуг. сек. за Ь мип и с чувствительностью (разрешающей способпостью) датчика не хуже 0,2 дуг. сек, обеспечение возможности выхода одного вала из соосного положения в лю.бом направлении на
360°. Выше приведенные параметры должны обеспечиваться при относительной скорости вращения валов -ЗО /сел, радиальном бое валов до 0,01 мм и начальной несоосности валов до 0,1 мм.
Поставленная цель достигается те.м, что в предложенно.м датчике нулевого положения обкладки емкостного преобразователя расположены на сферических поверхностях и включены по дифференциальной схеме последовательно с согласующими трансформаторами, подстройкой и)|дуктивности которых датчик } астраивается на рабочую частоту. С целью увеличения крлтизны выходной характерист;:ки в схему включены регулируемые индуктивности, компенсирующие паразитные емкостм обкладок статора и соединен)1ых с ними цепей относитель1 о корпуса (экрана). Для сглаж;.вапия пульсации выходного напряжения параллельно плечам дифференциальной схемы включены сглаживающие емкости. Причем, в отличие от обычного включе; ия фильтра низкой частоты в цепь сигнала предлагаемое включение не вызывает вре.мен;1ого запазды5вания выходного напряжения при вращении валов, на- величину, большую, чем период питающего напряжения. Для более эффектив1:0го использования датчика ширина и щаг обкладок статора и ротора выбраны такими, что
0 угол перекрытпя пластин статора п ротора
равен отношению величины зазора к минимальному радиусу обкладок (отступление от этой оптимальной величины перекрытия оокладок в ту или другую сторону приводит к значительному снижению крутизны выходной характеристики, вызывает ухудшение стабильности фиксация нулевого положения, т. е. существенно понижает точность датчика).
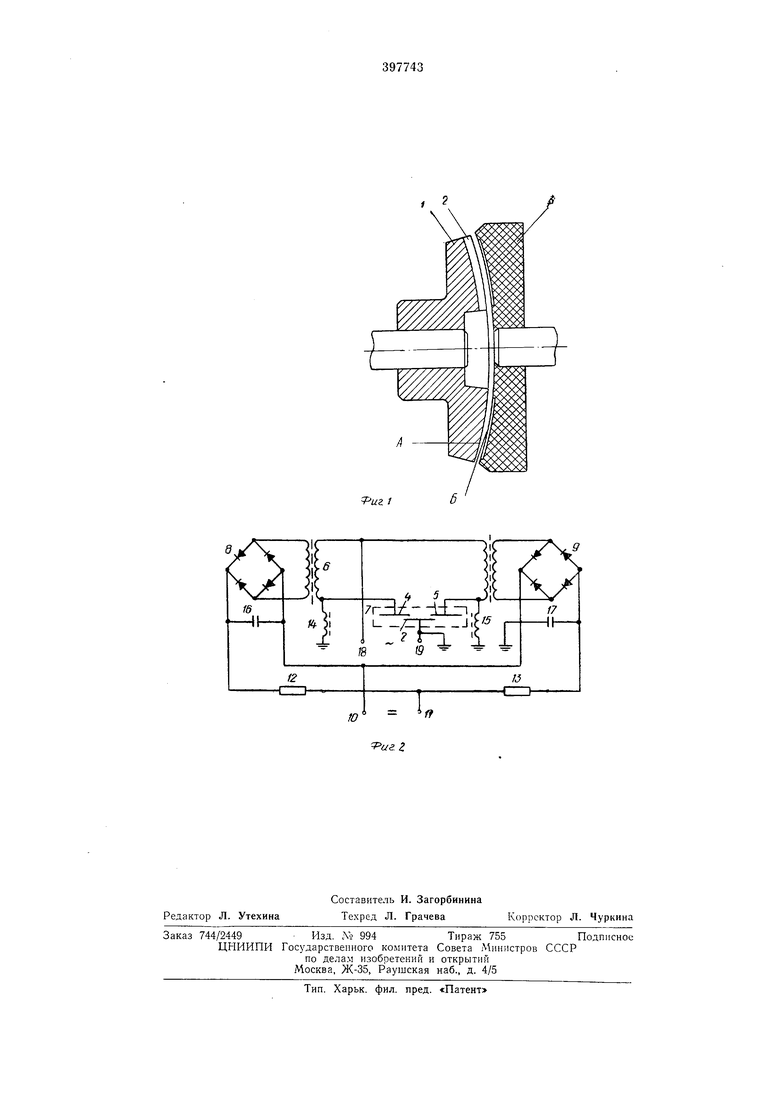
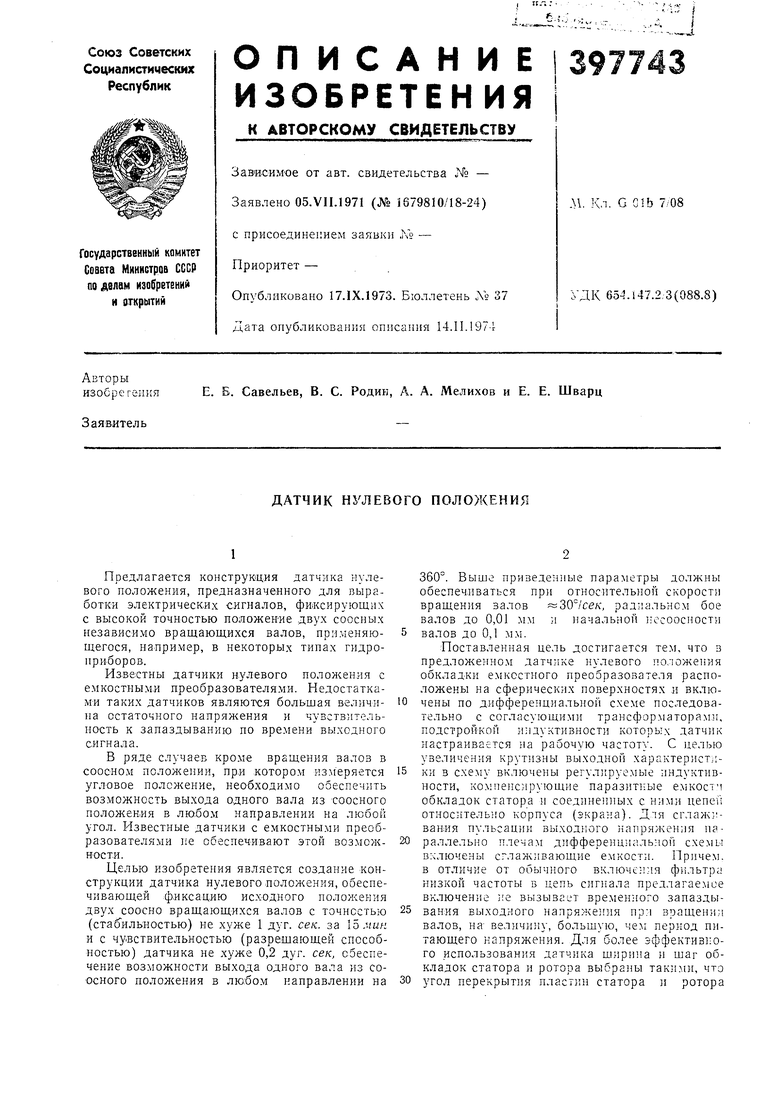
На фиг. I показан датчик нулевого положения; на фиг. 2 - электрическая схема датчика.
Датчик нулевого положения состоит из ротора 1, на рабочей концентрической сферической поверхности А которого имеются п обкладок 2, и статора 3, выполненного лз изоляционного материала (например, керамики). На рабочей концентрической сферической поверхности Б статора имеются 2 п обкладок 4, выполненных из проводящего материала. Нричем все нечетные обкладки соединены между собой в одну цепь (4), а четные - .в другую (5). Обкладки ротора соединяются с корпусом (экраном) датчика, а обкладки статора соединяются последовательно с согласующими трансформаторами 6 и 7, вторичные обмотки которых включены на вход выпрямительных мостов 8 и 9. Выходы мостов подсоедиьгены к выходным зажимам 10 и 11 датчика через два баластных сопротивления 12 и 13. Нараллельно плечам емкостного преобразователя включены компенсирующие индуктивности 14 и /5, а в плечя схемы (на выход мостов) включены сглаживающие емкости 16 и П.
Датчик нулевого положения запитывается напряжением высокой частоты (клеммы 18 и 19). Нри вращении ротора датчика про.исходит изменение емкостей между обкладками 2 ротора и обкладками 5 статора. Нричем если емкость между об,кладками 2 и 4 уменьшается, то емкость между Обкладками 2 и 5 увеличивается, и наоборот. В момент когда эти емкости равны, а, следо.вательно равны и напряжения на выходе мостов, на клем.мах 10 и // датчика напряжение равно нулю. Это положение валов принято за ис.ходное (нулевое).
при новороте лю.бого вала происходит из.менение величин емкостей между обкладками
ротора и статора, что приводит к изменению
нап-ряжения на выходе мостов и появлению на клеммах 10 и // постоянного напряжения, величина которого зависит от угла, а полярпость - от направления поворота. Это напряжение может быть подано, например, на
усилитель-формирователь импульсов, что позволяет Б мо.мент прохождения вала через нулевое положение иметь на выходе усилителя импульс, который используется для точной фиксации положения двух соосно вращающихся валов.
При этом обеспечиваются отсутствие зоны нечувствительности выходной хара-кте ристики датчика в нулево.м положении, достаточная величина крутизны и стабильность нулевого
положения при люфтах.
Н р е (Д1М ет изобретения
Датчик нулевого положеция, содержащий
емкостной преобразователь угла с ротором, обкладки которого подключены к источнику вХОдного напряжения, и статоро.м с обкладками, трансформаторы, к первичным обмоткам которых подсоединены индуктивности, вторичные об.мотки трансформаторов включены в первые диаго налл вьтрямительных мостов, ко вторым диагоналям которых параллельно подключены конденсаторы и последовательно резисторы, отличающийся, тем, что, с целью
повышения точности я надежности работы устройства, рабочие поверхности ротора и статора емкостного преобразователя выполнены концентрическими сферическими; причем нечетные обкладки статора соединены последовательно с первичной обмоткой пер-вого трансформатора, четные обкладки статора соединены последовательно с первичной обмоткой второго трансформато-ра, а угол перекрытия обкладок равен отношению величины зазора
к их .минимально.му радиусу.
f 5
.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| КВАЗИРЕЗОНАНСНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ С ПОВЫШЕННЫМ КПД | 2016 |
|
RU2637813C1 |
| ГИДРОСТАТИЧЕСКИЙ НИВЕЛИР | 1971 |
|
SU318814A1 |
| УСТРОЙСТВО для ПОДВЕСКИ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1971 |
|
SU309243A1 |
| Устройство для преобразования абсолютного изменения модуля комплексного сопротивления в активный сигнал | 1983 |
|
SU1095098A1 |
| Емкостной абсолютный преобразователь угловых перемещений | 2019 |
|
RU2724150C1 |
| СПОСОБ НАСТРОЙКИ ФАЗОВРАЩАТЕЛЯ | 1970 |
|
SU273267A1 |
| СПОСОБ ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ (ВАРИАНТЫ) | 1998 |
|
RU2182398C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |